速率陀螺在运载火箭上的应用及冗余方式
2022-03-10李新明
王 硕,李新明,2
(1. 北京航天自动控制研究所,北京,100854;2. 宇航智能控制技术国家级重点实验室,北京,100854)
0 引 言
目前,大型运载火箭姿态控制系统一般采取惯性稳定平台或捷联惯性测量组合、速率陀螺与计算机控制的方案,惯性稳定平台或捷联惯性测量组合的测量信息与速率陀螺测量信息经箭载计算机采样后进行综合,共同完成控制方程的计算。运载火箭的弹性振动幅值稳定和相位稳定都对姿控系统测量元件安装位置提出了特定要求,速率陀螺由于其体积小、安装精度要求不高,安装位置比较灵活,因此运载火箭均采用速率陀螺信息参与控制,提高对箭体弹性振动的控制与稳定。
速率陀螺在运载火箭上的应用主要是为姿态控制提供微分超前信号,如果采用惯性稳定平台敏感的姿态信息进行微分,得到箭体控制需要的角速度信息方式,则由于箭体弹性振动和噪声的影响,得到的微分超前信息存在较大噪声,甚至可能是虚假信号,20世纪60年代初,某地对地导弹首飞试验失利就是因为此原因导致。对于速率陀螺的测量信号,不仅仅是姿态控制所需的信息,还包含了大量的弹性振动信息以及噪声,为了得到姿态控制系统所需的信息,需要选择速率陀螺合适的安装位置,保证速率陀螺的测量信号既可以提供火箭刚体控制所需的姿态角速度信号,也可以减小进入控制系统的弹性振动信息。
速率陀螺测量信息的正确性对火箭的稳定起着至关重要的作用,如果故障测量信息引入姿态控制系统,将导致火箭姿态失稳乃至飞行失利。某型号运载火箭曾因速率陀螺极大值输出故障导致飞行失败。中国民营航天公司研制的OS-M运载火箭在一二级正常分离后,由于速率陀螺发生故障导致火箭姿态失稳。考虑运载火箭发射的高成本,需要对姿控系统重要单机进行冗余设计。对于姿态控制所需的速率陀螺单机,在仅考虑一度故障模式的前提下,需要保证在某一控制通道的一个速率陀螺发生故障后,可以有冗余的速率陀螺提供角速度测量信息,并在设计裕度下能够保证稳定飞行。目前中国的运载火箭多采用每个控制通道(俯仰、偏航、滚动)安装两个速率陀螺作为敏感元件,每个通道的两个速率陀螺选择合适的位置,在同一位置或不同位置,采用幅值稳定或相位稳定的控制策略。CZ-2D运载火箭一级飞行段采用一级加二级速率陀螺取平均进行控制,在系统设计时兼顾其中一只陀螺故障时控制系统仍能保证飞行稳定,二级飞行段采用故障吸收方案,即“速率陀螺+微分网络”进行控制。国外方面,Ares-1运载火箭安装了一个惯性测量平台和两个速率陀螺,为了减小进入控制系统的弹性信号,综合测量元件的故障诊断结果和安装位置因素设计了3个加权系数动态调整方案,从而降低弹性信息和故障信息对控制系统的影响。
本文对速率陀螺的应用原理和速率陀螺冗余方案进行介绍,并针对速率陀螺在工程应用中的姿态控制设计做简要介绍。
1 速率陀螺的应用方法
1.1 原 理 [5]
1.2 应 用
若要速率陀螺对某次弹性振动信号不敏感,则需将它安装在该次弹性振型的波腹处,但在飞行过程中,由于质量分布的变化,该次弹性振型的波腹也在不断变化,速率陀螺的位置一旦固定,在飞行过程中则很难再改变,所以为了使整个飞行阶段,速率陀螺对某次弹性振型斜率均不敏感,则可以采用2个速率陀螺,安装在不同位置,使其感受到的该次弹性振动信号相位相反。通过将2个速率陀螺的信号按合适的比例进行迭加,从而使该次弹性振动信号互相抵消。
2个速率陀螺测量到的信号分别为
通过将2个速率陀螺的信号按式(7)中的比例相加则可将一次弹性振动信号抵消掉,改变12,的值可以做到在整个飞行时间对一次弹性振动信号不敏感。
2 速率陀螺的冗余设计
对于多级运载火箭来说,每级都有各自的速率陀螺,各级速率陀螺随火箭的飞行时序转级,如火箭一二级分离时刻,通过信号转换装置将用于一级控制的速率陀螺信号切换为用于二级控制的速率陀螺信号。采用这种单速率陀螺转级控制方式,当速率陀螺发生故障时,速率陀螺无法提供超前相位,导致控制系统无稳定裕度或稳定裕度非常小,从而影响控制系统稳定性。随着运载火箭设计复杂性及可靠性要求不断提高,这种单速率陀螺的控制方法已无法满足速率陀螺故障时对控制系统稳定性和火箭飞行可靠性的要求。
为了提高运载火箭的可靠性,目前运载火箭速率陀螺一般采用双冗余设计方案,即每个通道安装2个速率陀螺,这样既能保证设计的可靠性,又能节省硬件和系统复杂度。双冗余设计方案,其中一个速率陀螺发生故障后,依靠另一个速率陀螺提供的超前信号和系统设计的稳定裕度保证火箭稳定飞行。
速率陀螺冗余方案的设计根据速率陀螺安装位置不同而有所区别。根据姿控系统对弹性振动信号的要求,每个通道的速率陀螺可能安装在同一位置,也可能安装在不同位置,根据安装位置的不同,介绍相应的速率陀螺冗余方案。
2.1 速率陀螺安装位置相同的冗余方案
若每个通道的2个速率陀螺安装位置相同,则两个速率陀螺的力学环境基本相同,可以认为在正常情况下2个速率陀螺的信息一致,所以首先对两者进行一致性判别,若未超过一致性门限则认为速率陀螺信号正常;若超过一致性门限且连续持续一定次数,则引入捷联惯组信息与速率陀螺信息进行比较,判别出故障速率陀螺将其切除。同时姿控系统在设计阶段需考虑适应此故障模式。图1为速率陀螺安装位置相同 时的冗余方案。
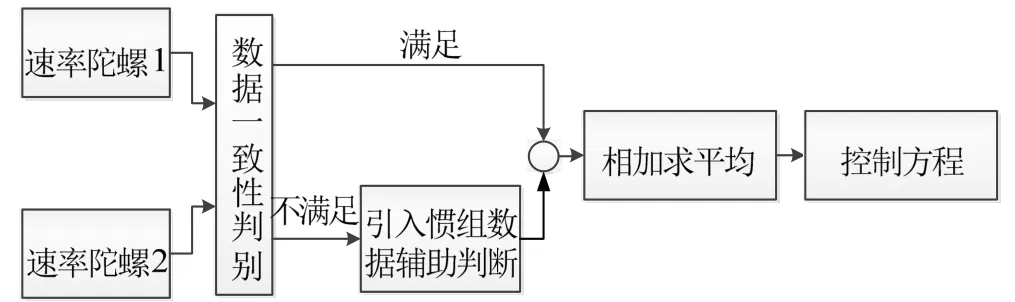
图1 速率陀螺安装位置相同 时的冗余方案Fig.1 Schematic Diagram of the Redundancy Scheme When the Rate Gyro is Installed in the Same Position
2.2 速率陀螺安装位置不同的冗余方案
若每个通道的2个速率陀螺安装位置不同,2个速率陀螺敏感到的角速度信息包含的弹性信息不同,导致其一致性判别门限很难选择,所以无法采用一致性判别的方式,因此在这种情况下仅对每个速率陀螺单独进行合理性判别,当某一个速率陀螺连续不满足合理性判别时,则选择将其切除,其输出用0值代替,为了适应单个速率陀螺被切除的情况,在姿控系统设计阶段需通过选择合适的校正网络参数,保证在故障情况下系统仍然具有足够的稳定裕度,运载火箭在单个速率陀螺发生故障情况下能够稳定飞行。图2为速率陀螺安装位置不同 时的冗余方案。
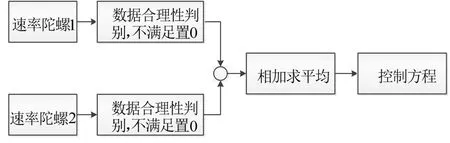
图2 速率陀螺安装位置不同 时的冗余方案Fig.2 Schematic Diagram of the Redundancy Scheme When the Rate Gyro is Installed in the Different Position
3 速率陀螺在运载火箭上的应用
CZ-2F运载火箭是中国第1款也是目前唯一一款在役的载人航天运载火箭,它是在CZ-2E捆绑火箭基础上改进研制的大型捆绑式两级运载火箭,为适应载人航天高可靠性、高安全性要求,CZ-2F运载火箭在设计时采取了多种冗余容错措施,保证火箭在一度故障下仍能够稳定飞行。
改进型CZ-2F运载火箭速率陀螺采用双速率陀螺冗余方案,综合利用I、II级速率陀螺,在不增加硬件情况下形成冗余设计。根据敏感弹性振动要求,每个通道的2个速率陀螺安装位置均不同。CZ-2F运载火箭速率陀螺冗余方案采用速率陀螺安装位置不同的冗余方案,当判断出某一速率陀螺发生故障后,将其切除。为保证单一速率陀螺被切除后新系统保持稳定,姿控系统在设计时需保证在单个速率陀螺发生故障情况下仍具有足够的稳定裕度,选择合适的校正网络。
3.1 单个速率陀螺发生故障下的姿控设计
高可靠运载火箭姿控系统在设计阶段需要考虑其中1个速率陀螺发生故障能保证稳定飞行,因此设计校正网络时需要在速率陀螺正常和故障两种状态下均具有足够的稳定裕度。图3是不加校正网络情况下,只考虑姿态角偏差和姿态角速度反馈控制时的开环传递函数频域图,在判别出其中一个速率陀螺发生故障后,将该速率陀螺输出人为置0,导致开环传递函数刚体处的相位裕度减小,晃动和弹性部分的幅值和相位也会受到影响。
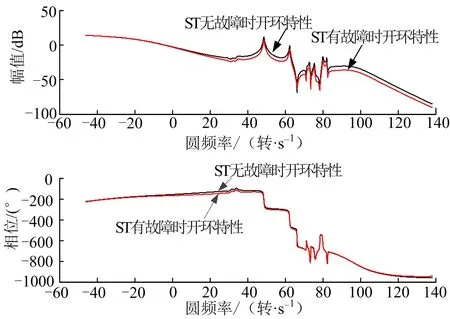
图3 无故障和单个速率陀螺故障下开环特性对比Fig.3 Comparison of Open-loop Characteristics under Fault-free and Single-rate Gyro Faults
设计校正网络提高刚体处的相位裕度,保证在速率陀螺故障情况下系统仍然具有足够稳定裕度。考虑校正网络后的系统开环传递函数频域特性如图4所示。
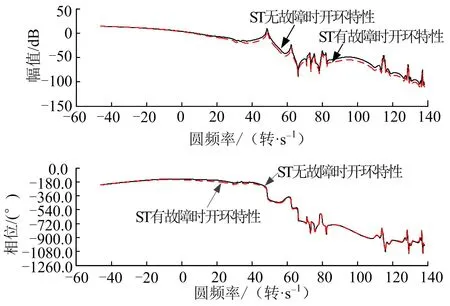
图4 增加校正网络后无故障和单个速率陀螺故障下开环特性对比Fig.4 Comparison of Open-loop Characteristics with No Fault after Adding Correction Network and Single Rate Gyro Fault
3.2 单个速率陀螺发生故障下的时域仿真
对速率陀螺发生故障情况进行时域仿真,假设在飞行50 s时俯仰通道一个速率陀螺发生故障,火箭大约在80 s左右进入大风区,进入大风区后对姿控系统的适应能力要求较高,所以在此时验证当速率陀螺发生故障被切除1个后,姿控系统是否可以正常工作。
由图5和图6可知,当50 s速率陀螺发生故障被切除后,俯仰通道角偏差与正常飞行情况下变化不大,且舵摆角没有发生突变,均在指标设计范围内。因此通过设计阶段考虑1个速率陀螺被切除的影响,保证在速率陀螺故障下仍具有足够的稳定裕度,可以实现运载火箭的稳定飞行。
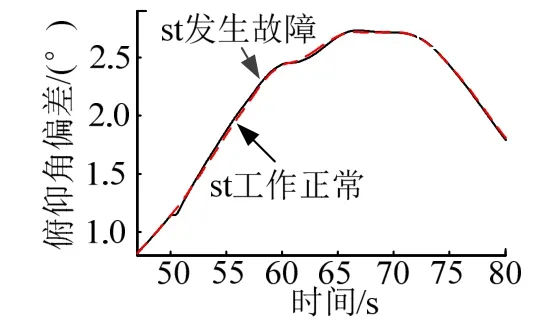
图5 姿态角偏差变化Fig.5 Attitude Angle Deviation Change Curve

图6 一级舵摆角变化Fig.6 First-stage Rudder Swing Angle Change Curve
4 结 论
本文针对速率陀螺在运载火箭上的应用以及冗余方式进行了介绍,从速率陀螺的应用原理、冗余方式两方面进行了总结与归纳,并对速率陀螺在工程应用中的姿态控制设计做了简要介绍。速率陀螺在火箭刚体稳定控制和弹性振动的稳定控制方面具有重要的作用,可以为姿控系统提供刚体控制所需的超前信号,同时通过对速率陀螺安装位置的优化,减小其敏感到的振动信息。考虑速率陀螺一度故障的情况,在姿控系统设计阶段就考虑在故障情况下的姿态控制稳定裕度,保证其中一个速率陀螺被切除的情况下火箭仍能稳定飞行。目前中国现役的长征系列运载火箭速率陀螺的应用与冗余方式多采用上述形式,随着新一代载人运载火箭的研制,其弹性频率较低,与刚体和晃动的耦合更加严重,现有的两个速率陀螺的应用形式可能无法满足姿态控制需求,未来需要研究如何调整两个速率陀螺输出信号的利用比例从而达到更好的控制效果。