程序管制教学仿真系统设计与实现
2022-03-09廖勇,方娜
廖 勇, 方 娜
(中国民用航空飞行学院 空中交通管理学院, 四川 广汉 618307)
当多架民用航空器在空中运行时,可能会存在航空器与航空器相撞、航空器与地面障碍物相撞等安全问题,同时多架航空器间缺乏统一的管理可能导致航空器运行混乱、效率降低。为了使航空器安全、高效和有序运行,世界各国都为民用航空器的运行提供了空中交通管制服务。根据管制方式的不同,分为程序管制和雷达管制。作为雷达管制方式的备份和在中小机场管制中的广泛应用,程序管制显得非常重要[1]。作为提供空中交通管制服务的管制员,掌握程序管制技能是最基本的要求。因此,世界各国培养空中交通管制员的民航院校都开设了《程序管制》课程,作为空中交通管理专业的核心课程。其特点是分为两阶段教学,即课堂理论教学和模拟机实践教学,两者的重点不同。理论教学的目的是要求学生掌握管制过程、熟悉管制间隔、理解飞行冲突解决方法。实践教学是理论知识综合应用,其目的是通过模拟训练,加强对管制间隔的理解、增强主动管制意识、合理分配注意力、明确安全与效率的关系等,属于技能提升教学。
在提升《程序管制》课程教学质量方面,多位教师做过相关方面的研究,并取得了部分研究成果。这些研究多集中在程序管制的教学理念方面[2-5]、管制工作负荷测评方面[6]、程序管制模拟机训练的考核方面[7-8]、管制工作负荷测评方面[9]、管制运行效率评估方面[10],以及管制培训指标优化[11]等方面。除此之外针对程序管制在一线应用的研究对课程教学也有很大的启示。如李龙新提出要提高程序管制过程中管制员的主动性[12];张愈奇、唐卫贞[13]认为要加大管制培训力度,全面提高空管人员的素质。
对现有的研究分析发现,对程序管制模拟机教学系统方面的研究未见报道。本文开发了一套动态可视化的程序管制理论教学辅助系统。该系统能可视化地展示空域结构和航空器的信息,动态化地仿真航空器运行过程,更新航空器的各种信息。通过该系统的辅助,可以使学生感性化地了解航空器的运行环境,动态化地跟踪冲突的发生过程,理性化地理解冲突解决方法,最终实现提升教学质量的目的。
1 必要性分析
1.1 存在的问题
正如前文所述,《程序管制》课程分为理论教学和实践教学两阶段,通过多年教学经验,其理论教学阶段存在如下教学问题:
1)缺乏动态化教学手段,管制过程难以表现。管制的本质是管制员根据航空器的运行过程给航空器动态发布管制指令,机长按照管制指令操纵航空器运行。掌握航空器的上升、下降、移交等管制过程是程序管制教学的基本要求。由于理论教学过程中,缺乏动态化的教学手段,管制过程难以表现。
2)缺乏可视化教学平台,教学过程不直观。空中交通管制的对象是航空器,航空器的运行需要空域,包括管制移交点、导航台、航路、航线、管制边界等。在缺乏可视化教学平台的情况下,所有飞机和空域等要素需要学生通过空间想象能力自己在脑海里构建。在课程学习初期,由于学生不熟悉空域和程序管制的间隔等原因,很难构建起正确的管制场景,使得教学难以推进。
3)理论教学与实践教学脱节,知识难以融会贯通。理论教学和实践教学是分开的,原因是理论教学在普通教室进行,实践教学在机房进行,受硬件教学资源的限制,无法将两者进行有机融合。加之理论教学不具可视化和动态的缺点,理论教学效果较差。学生在理论教学中未能达到要求,导致在进入第二段的模拟机实践教学中,不能对飞行冲突进行预判,更不能合理提出解决方案。此时教师不得不在实践教学中花大量时间解决理论教学遗留的问题。导致理论教学与实践教学存在重复教学,失去实践教学的重点,管制知识不能融会贯通。
1.2 系统目标
针对现有程序管制理论教学中存在的问题,开发出一套动态可视化的程序管制理论教学辅助软件,对于提升程序管理理论教学大有裨益。该软件系统能可视化地展现空域的结构,动态化地表现出空中交通状况,引导学生循序渐进地构建管制场景,不但可以快速地掌握程序管制的管制流程,还可以让学生深刻理解各种管制间隔的内涵。与模拟机实践教学的区别在于,该软件系统主要解决理论教学中存在的教学手段不直观,教学内容难理解,从而造成学生不能掌握各种管制间隔和冲突调配方法的问题,为下阶段模拟机实践教学打下坚实的基础。
2 需求分析
2.1 用户需求
该系统的主要用户是教师,教师在理论课堂上通过该系统向学生可视化地展示管制空域和航空器等对象,动态化地展示管制过程,使得程序管制理论课程教学更加直观,系统需求包括可视化需求、动态化需求和系统交互需求。
1)可视化需求。可视化需求包括空域的可视化和飞机的可视化,以及飞行计划的可视化。
2)动态化需求。动态化需求是针对于航空器运行的,航空器随着时间的变化,可不断地更新水平位置和高度信息。
3)系统交互需求。系统交互需求实现教师与系统之间的信息交互,是教师实时控制系统的工具。空域视图的调整、飞行计划的编制、航空器指令发布都需要教师与系统之间进行交互。
2.2 功能性需求
对系统功能进行设计时,应充分满足用户的需求。因此功能性需求包含飞机模块、空域模块、飞行计划编制模块、系统界面模块和动画控制模块。界面模块提供人机交互接口,是教师调整空域、控制航空器、编制飞行计划的窗口。飞机模块提供飞机的水平位置、高度、呼号等各种信息。教师通过飞行计划模块对飞行计划进行添加、删除、修改和保存等操作。空域模块将设置的空域数据渲染成可视化的空域结构。动画控制模块实现航空器的动态运行。系统的各个功能模块以及满足用户各种需求的关系如图1所示。
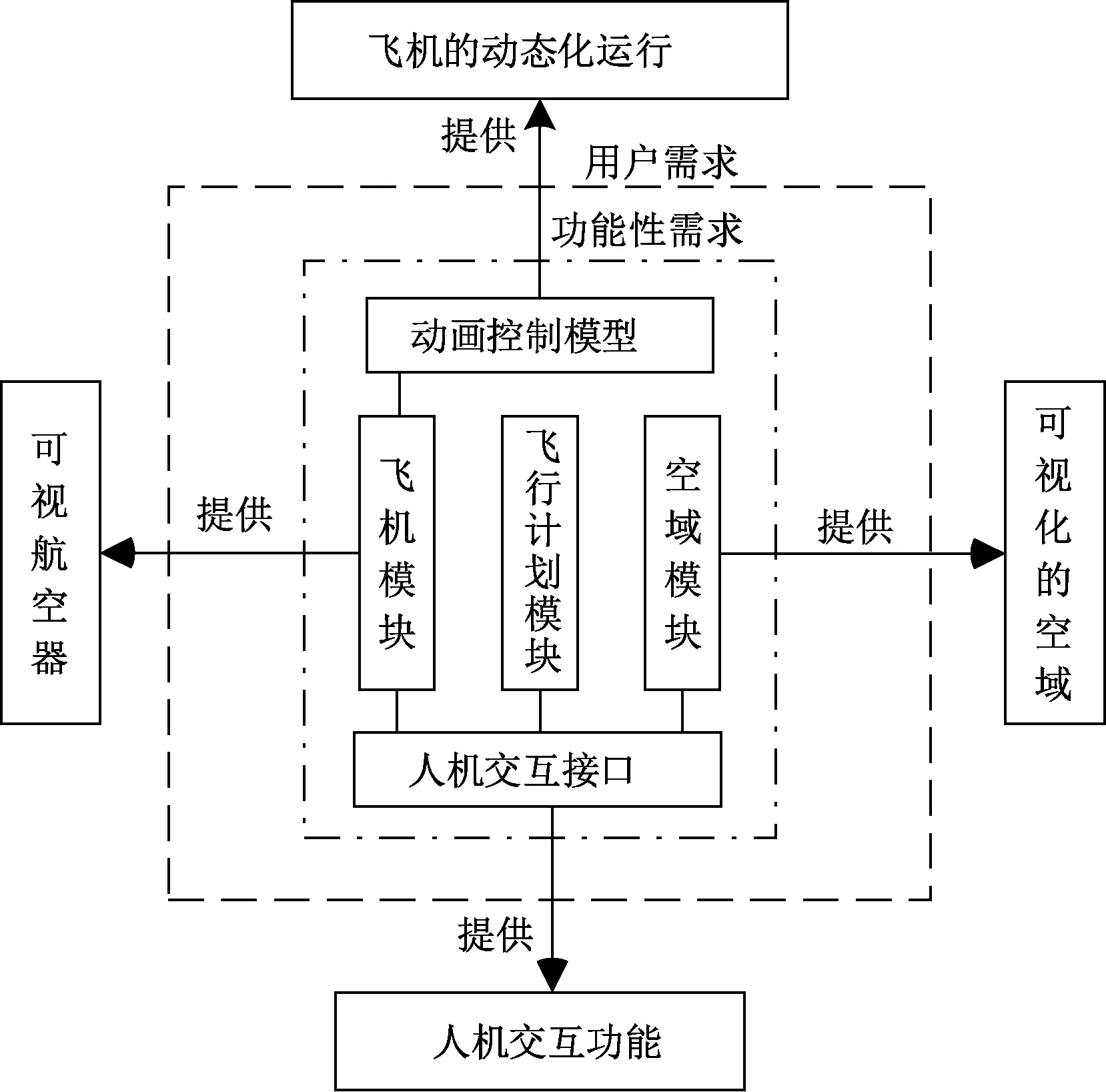
图1 系统需求分析
2.3 非功能需求
系统在考虑到有完整功能的同时,也要考虑用户操作的简洁性、方便性和易用性。系统必须具有较高的可靠性和稳定性,才能保证课堂教学正常,不至于中断教学。课堂教学的多媒体电脑较为老旧,各个教室的设备性能差别较大,因此系统应该满足通用性和轻量级的要求。系统需要通过动画展示航空器的运行过程,要求系统具备一定的流畅性,避免在运行过程当中出现卡顿。
3 系统设计
3.1 架构设计
系统的架构设计如图 2所示,整个系统架构分为7层,包括硬件层、运行环境层、数据层、模型层、业务层、表示层和用户层。
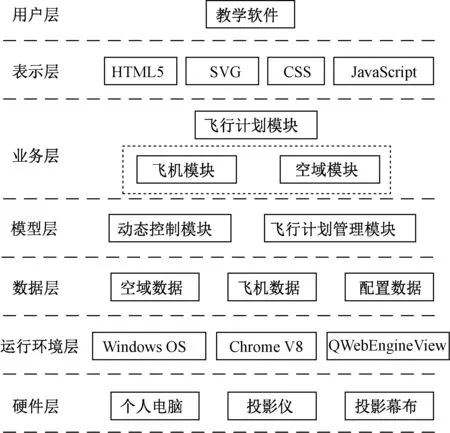
图2 系统架构设计
硬件层:个人电脑作为服务器使用,投影仪和投影幕布用于向学生展示教学过程。
运行环境层:系统运行在Windows操作系统之上,最低版本为Win7,chrome V8引擎用于解析JavaScript脚本,将HTML、CSS、JavaScript文本及相应的资源文件转换成图像。QWebEngineView实现浏览器的基本功能。
数据层:用于存储空域数据、飞机数据和系统配置数据。
模型层:建立飞机动态运行模型、飞行计划管理模型。
业务层:将空域数据、飞机数据和系统配置数据通过飞机模块、空域模块和系统界面模块渲染成图形视图。
表示层:采用 HTML5、CSS、JavaScript、SVG进行系统编程。
用户层:为教学软件供教师使用。
3.2 功能设计
3.2.1 空域模块
空域模块主要用于显示整个空域的可视化视图。包括管制边界、导航台的位置、导航台的名称、进离场航线、航段等。为了便于空域的观察,要求空域能够具备平移、缩放、全屏等多种功能。空域模块设计如图3所示。
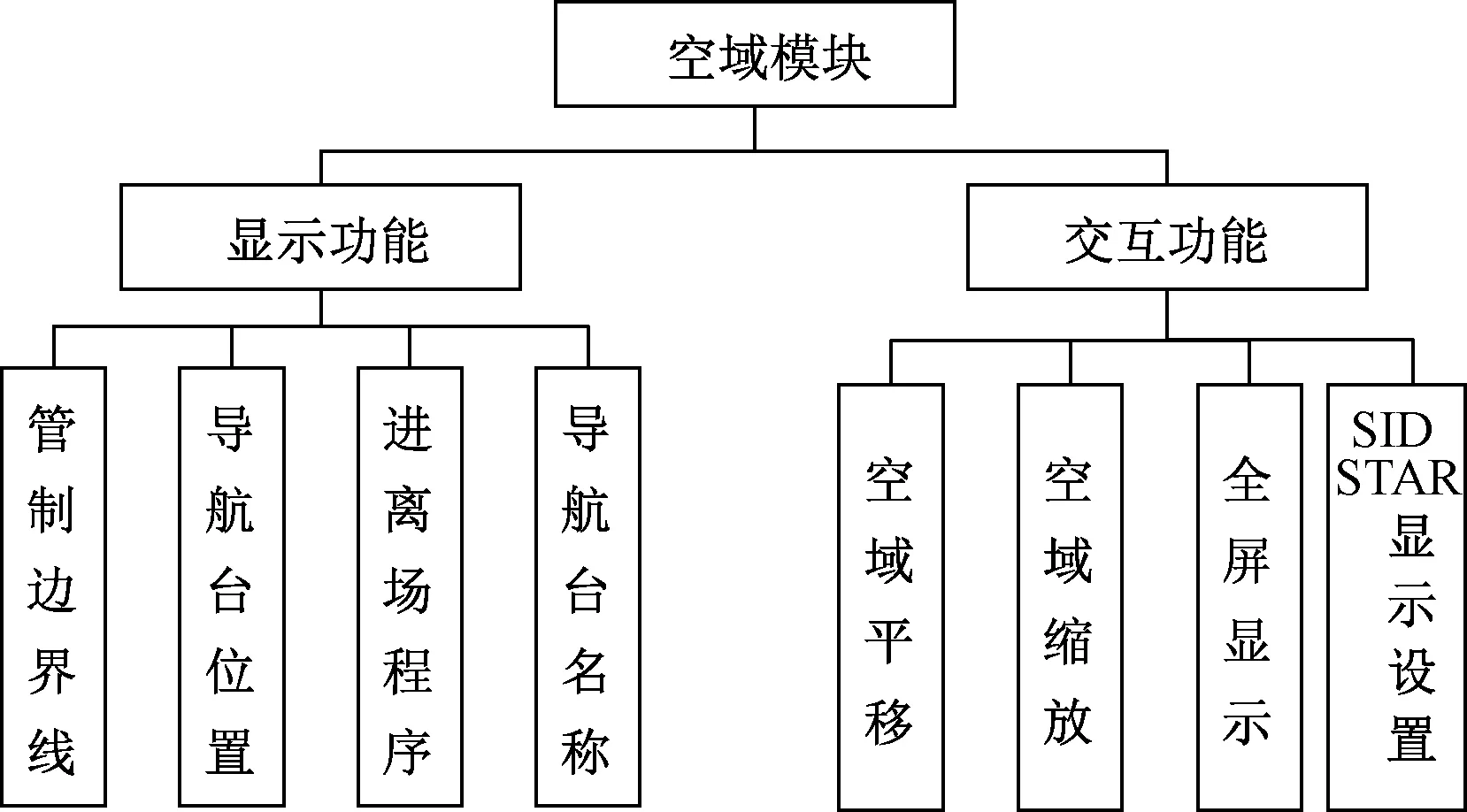
图3 空域模块设计
3.2.2 飞机模块
飞机模块用于显示航空器的位置,以及航空器的信息数据。包括飞机标记点、飞机预迹线、飞机的呼号、尾流类型、飞机的实时高度、飞机目标高度、飞机进离场程序等信息。飞机模块如图4所示。
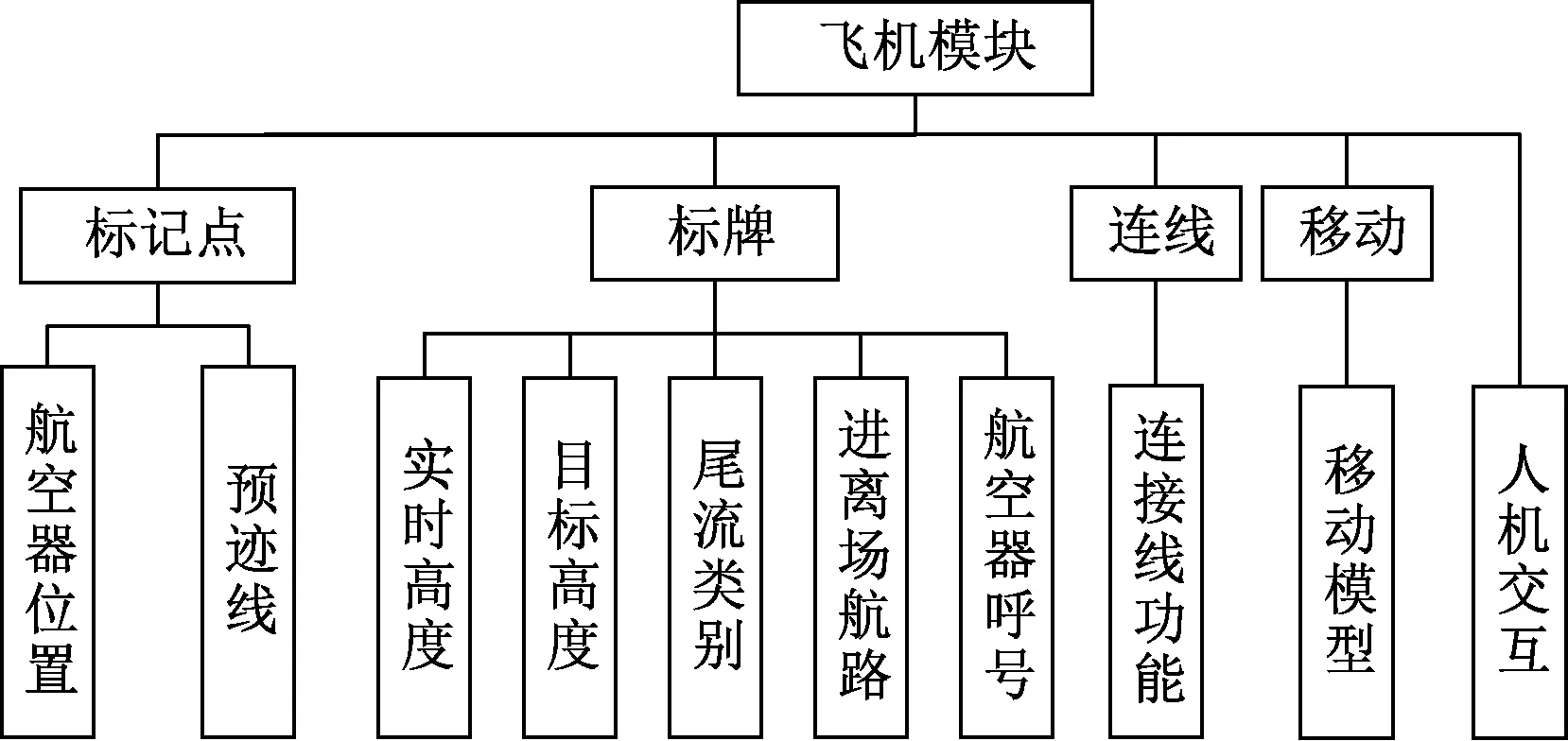
图4 飞机模块设计
3.2.3 飞行计划模块
飞行计划是程序管制制定预案的依据,也是系统运行的基础数据,飞行计划包含飞机呼号、进离场程序等数据。飞行计划模块包括计划的创建、加载、保存、修改、人机交互和数据校验等功能。飞行计划模块设计如图5所示。

图5 飞行计划模块设计
4 系统实现
4.1 空域选择
一个具体的空域是实施程序管制教学的基本条件,不同的空域进离场程序、冲突解决的方法、空域结构等方面存在较大的区别。该系统采用的空域是目前三所民航院校程序管制教学当中普遍使用的空域,该空域以武汉南湖机场进近空域为基础,根据教学的需要修改而来。其空域结构如图 6、图 7所示。进近空域比区调空域范围更小,航空器在此空域内运行存在更多的飞行冲突,更利于教学过程的开展。
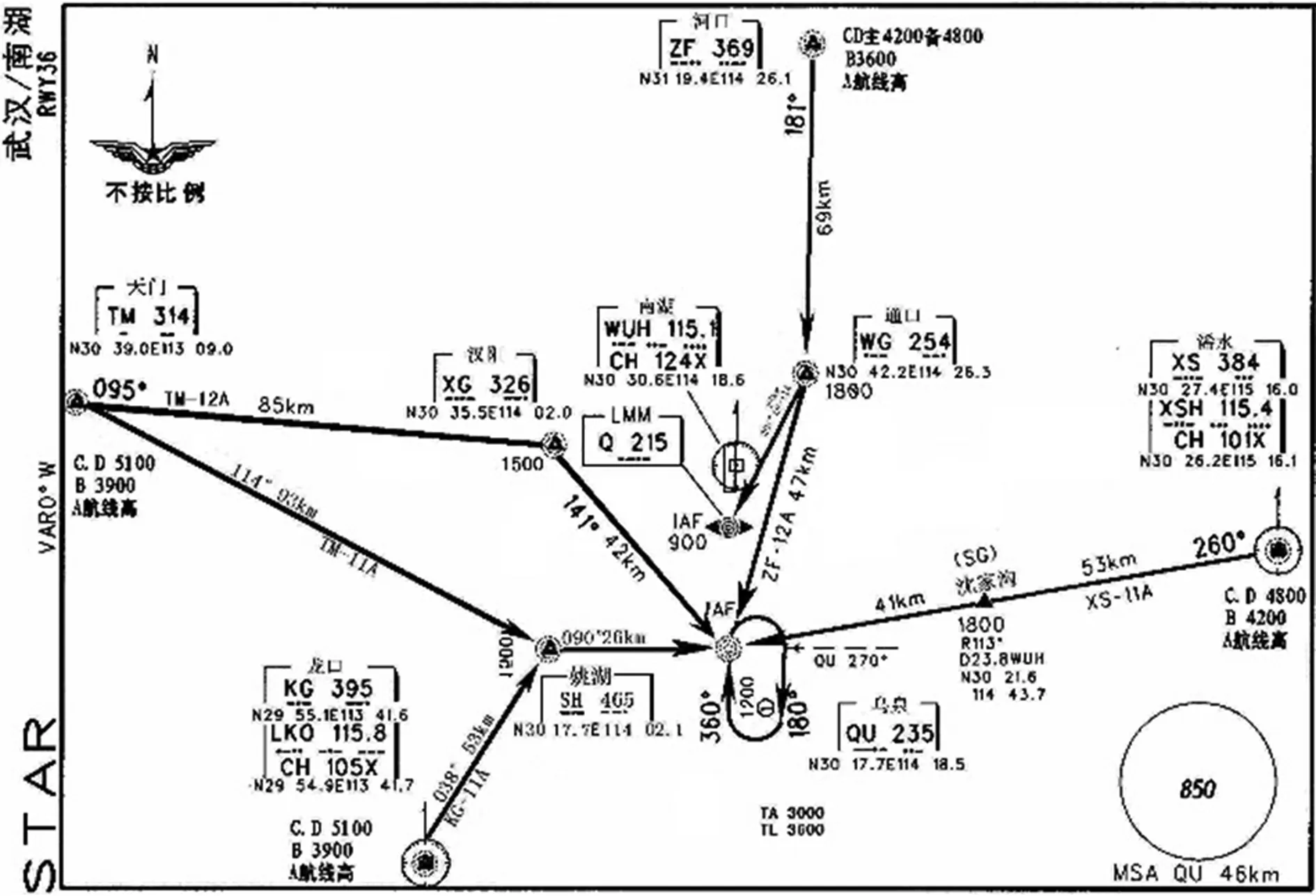
图6 标准进场程序
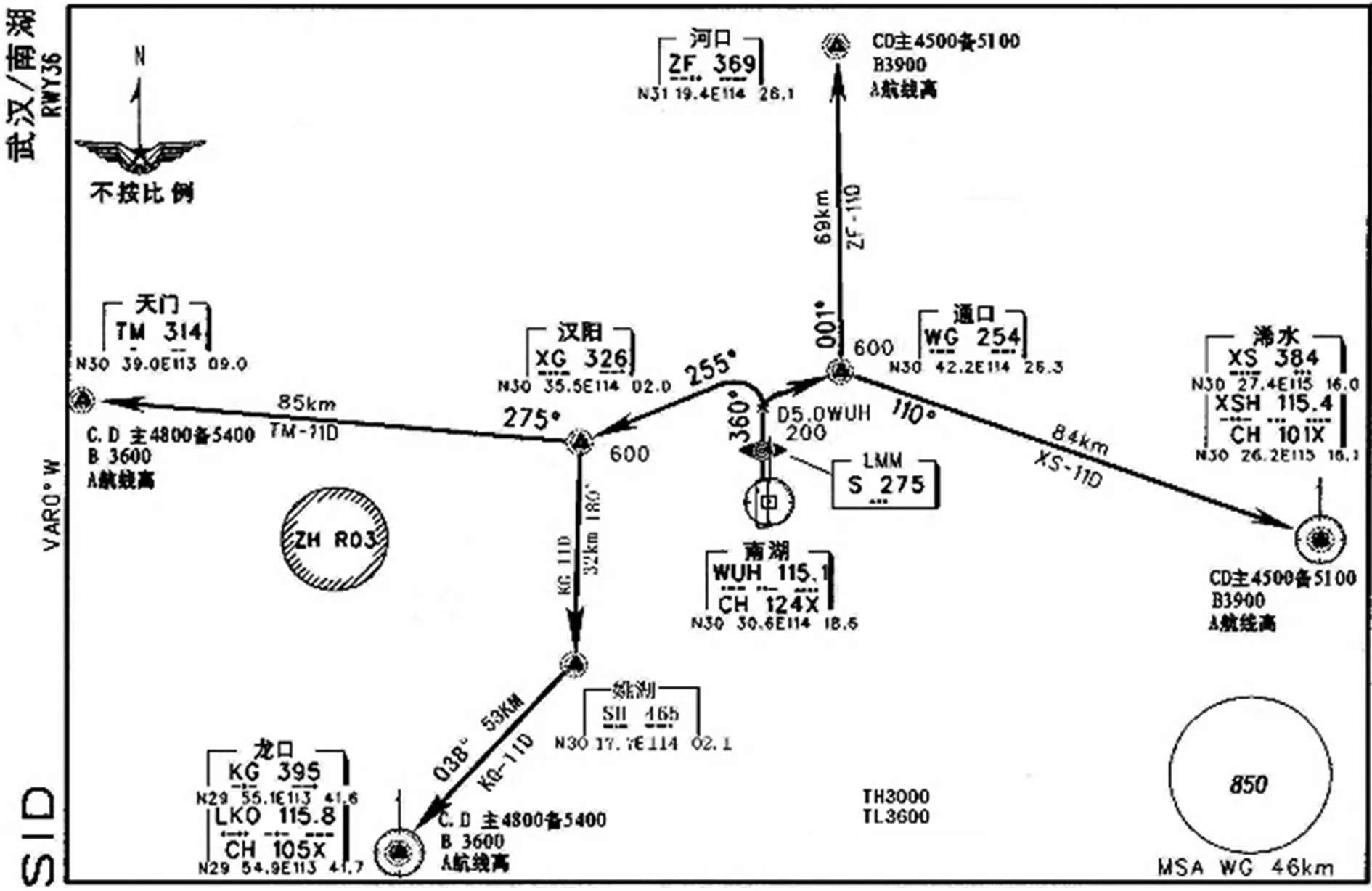
图7 标准离场程序
该空域包含4个外台:河口(ZF)、浠水(XS)、龙口(LG)、天门(TM),4个内台:汉阳(XG)、通口(WG)、姚湖(SH)、沈家沟(SG),起始进近定位点乌泉(QU),以及南湖(WUH)归航台。
4.2 系统实现
4.2.1 飞行计划模块
飞行计划模块包含了各航空器的信息,包括飞机的呼号、尾流类型、标准的进离场程序、高度信息和航路。该模块包含了飞机的添加、删除、保存和修改等功能。实现后的飞行计划模块如图8所示。

图8 飞行计划编制模块实现
4.2.2 空域模块
图6、图7空域图中各个导航台的坐标使用经纬度表示,首先需要将经纬度坐标转换成直角系坐标,将各个导航台的坐标和各进离场航线的数据存在数据库中,在系统初始化的时候,从数据库中读取数据,通过JavaScript结合SVG技术渲染成具体的空域图形,并实现空域的平移和缩放等交互功能。空运模块的实现结果如图9所示。
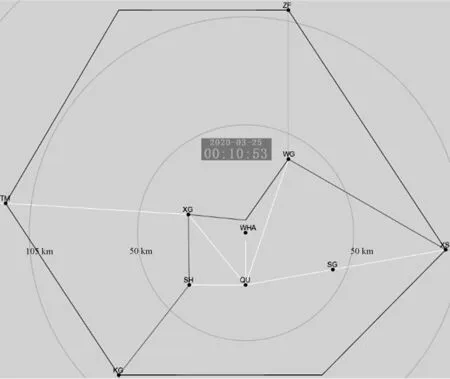
图9 空域模块实现
4.2.3 飞机模块实现
飞机模块包含了飞机的标记点、预迹线、标牌和连接线等功能。根据面向对象的编程原理,每一架飞机模块是一个对象,当需要新建航空器时,只需要根据飞行计划模块中设置的航空器呼号、尾流类型、进离场程序、目标高度等相关信息,便可以生成一架新的航空器。飞机模块的实现结果如图10所示。

图10 飞机模块实现
4.2.4 动态控制模型
动态控制模型负责航空器的动态化运行,应用JavaScript进行动态化编程,根据航空器当前的坐标、航向、速度、高度以及视图的刷新频率,计算下一个时刻航空器的坐标,然后把整个飞机模块移动到新的坐标位置,这样一个连续的多架航空器运行过程,便是航空器的动态化运行,如图11所示。
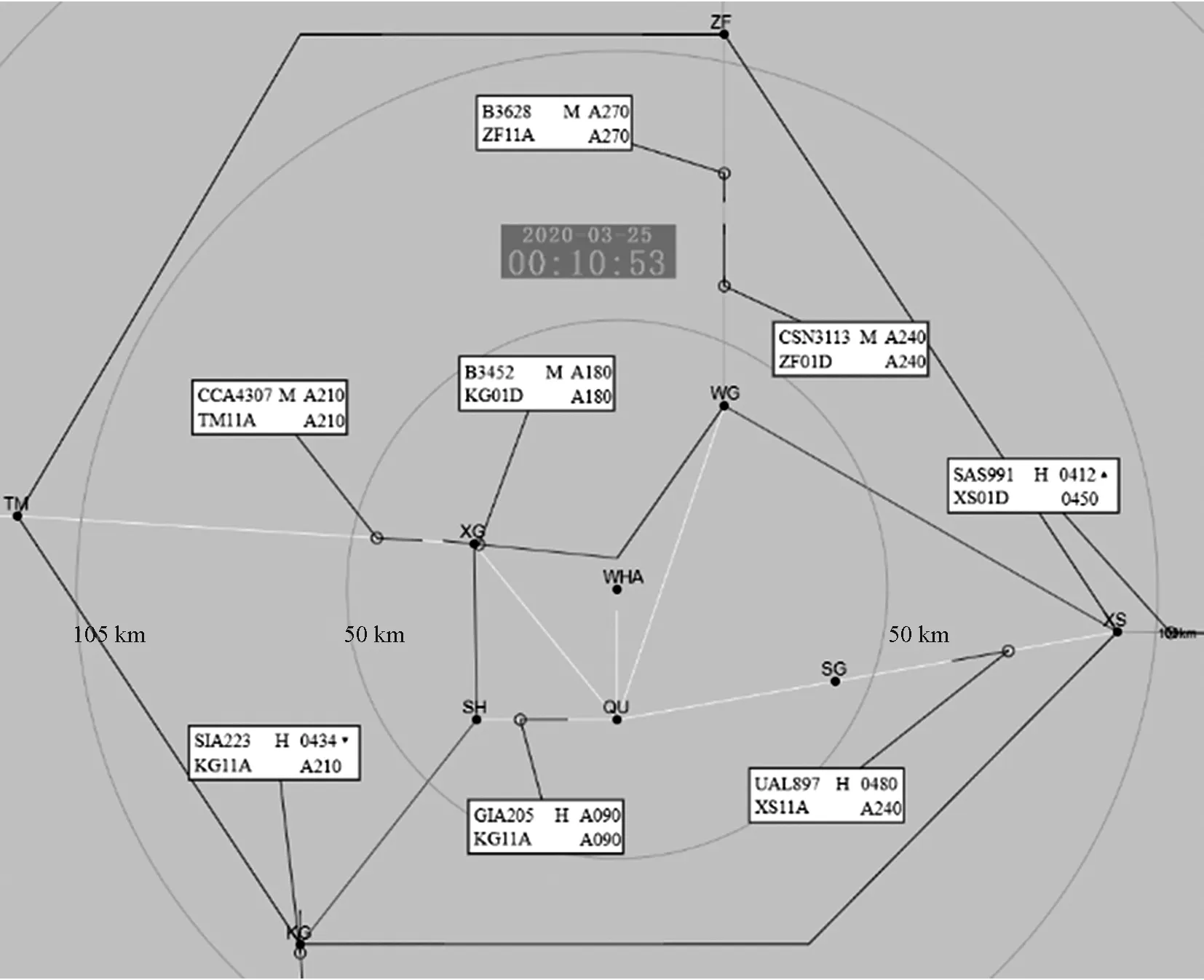
图11 多架航空器的运行
5 结语
由于程序管制课程教学内容抽象,在理论教学过程中存在教学不直观的缺点,学生学习比较吃力,教师教学过程开展较难。作者开发了一套可视化和动态化的程序管制理论教学辅助软件。该教学系统是为《程序管制》理论教学开发的首个可视化和动态化的教学系统。该软件具有如下特点:
1)能可视化地展示空域结构和航空器当前的运行状态,使得教学过程更加直观,逐步引导学生构建空间想象能力。
2)该软件可以动态化地显示航空器的运行过程,能够让学生在理论教学过程中快速掌握管制流程,深入理解管制间隔。
3)该软件系统具有轻量化的特点,无须安装,可直接使用教室内的教学电脑运行,方便使用。
与现有《程序管制》实践教学模拟机软件系统相比,该软件具有如下特点:
1)实践教学模拟机软件系统由厂商安装在实验室的特定设备上,教师无法将软件系统带入到理论教学课堂中。作者开发的理论教学系统具有轻量化的特点,无须安装即可使用。可以脱离实验室固定设备的使用限制,由任课老师带入理论教学课堂,方便理论教学。
2)实践教学模拟机软件系统需要管制位和机长位双人配合才能完成管制过程的仿真,操作过程复杂。本系统进行了功能优化,只需教师一人便能实现仿真过程,操作简单。
3)笔者开发的系统具有冲突自动检测和告警功能,这是实践教学模拟机软件系统不具备的。
该软件经过教学使用后,受到广大学生和教师的一致好评。同时也提出了进一步的改进建议,如进一步实现电子飞行进程单的功能。在后续开发过程中,将进一步完善此功能。