基于多连杆结构的二维仿生咬合力测量装置
2022-03-09冯海洋
冯海洋
徐献忠
(郑州大学力学与安全工程学院,河南 郑州 450001)
质地是构成食品品质的重要属性,从力学的观点出发,食品质地的一系列表现形式例如软硬、黏弹、酥脆、耐咀嚼等都是食品的组织结构对所施加外力的感官反映[1]。食品质地的检测通常采用感官评价法和仪器分析法。感官评价法是通过人的咀嚼行为并以色泽、质地、滋味和气味为评价标准对食品质地进行主观评价。其试验结果是人感官的直接反映,但个体的主观差异会导致评价结果离散性较大,很难对食品质地进行客观且稳定的评价[2]。仪器分析是利用不同食品检测设备对食品的物理或机械属性进行测试,再通过分析测试信号进而分析食品属性。与感官评价法相比,仪器测量法具有评价客观、结果精确等优点[3]。咀嚼模拟装置是一类能够模拟人类口腔咀嚼动作的装置,通过机器模拟口腔运动实现复刻咀嚼轨迹,并利用传感器获取在咀嚼过程中牙齿的咀嚼力、运动速度、加速度等咀嚼运动参数。目前已经被广泛应用于食品科学,为食品开发及食品质地评价提供了更为有效客观的方法。
目前已有科研人员对咀嚼模拟装置展开相应研究:王艺博[4]建立了一种仿人类下颌机器人模型,基于6-SPS并联机构并利用有限元建模技术计算出各肌肉线性驱动器的最大受力值;李晓峰等[5]根据机械仿生原理,基于6-PSS并联机构仿生下颌机器人模型优化了各杆长度;王加森[6]提出将经典Stewart并联机构应用于六自由度咀嚼运动的设计并进行了相关运动学与动力学分析与设计;秦文龙等[7]以颞下颌关节为主要研究对象,找出了弹性元件的最佳弹簧系数;Tahir等[8]设计了以液压驱动为基础的咀嚼模拟机器人,可完成在3个方向上的平移与转动;陈根禄等[9]利用Adams建立了虚拟样机并完成了运动学仿真;丰瑞鑫[10]采用了上下颌同时运动的方式建立咀嚼模拟平台并对各牙位进行了压力测量;吴范徐齐等[11]研制了一种基于3-UPS/RPP少自由度并联咀嚼运动模拟机器人,通过对模拟机器人的运动学奇异性分析验证了装置设计的合理性;杨嘉琦[12]研制了一种五自由度混联智能义齿机器人,该机器人采用双向滑台与三自由度并联机构连接的形式实现了对咀嚼轨迹的模拟;温海营等[13]引入了一种含有点接触高副的冗余驱动并联咀嚼机器人,通过医学测量手段得到下切点的运动范围和咀嚼频率,并进行了咬合力的测量;任杰[14]采用绳索牵引的方式来模拟人体下颌肌肉并以气动人工肌肉作为该机构的驱动器完成了咀嚼模拟机器人的设计;汤文杰[15]基于6RSS并联机构利用SolidWorks进行建模,并通过ADAMS计算得到了输入角度、角速度、角加速度的变换曲线;Kalani等[16]研发了可以通过肌电信号测量咀嚼轨迹的咀嚼模拟装置。
研究拟开发一种基于多连杆结构的咬合模拟装置,并结合仪器评价法与主观评价法对食品质地进行评价,以期为后期咀嚼模拟装置设计提供参考。
1 咬合模拟装置
1.1 装置主结构

1. 主结构 2. 测力结构图1 装置三维模型Figure 1 Three-dimensional model of the device
人类的咀嚼过程可以分为切碎和研磨两个阶段。在进行咀嚼时,上牙基本不动,主要依靠下牙的移动完成咀嚼运动。试验设计的基于多连杆结构的咬合模拟装置可用来模拟人类切牙的咬合运动轨迹。人体的头部即上颌骨在咀嚼过程中作为原点保持不动,而下颌骨通过肌肉带动往复运动完成咀嚼过程,基于此为了提高设计方案的方便性和装置的稳定性,采取了上下颌位置对调的方案。图1为通过Solidworks建立的咬合模拟装置三维模型,该装置分为主结构与力学测量结构,主结构支撑起了整个装置以及完成咬合模拟运动,力学测量结构可以对咬合过程中的二维受力情况进行测量。
装置主结构如图2所示,C1、C2分别为下切牙点和上切牙点,初始时两点重合。连杆AO2可绕定点O2点旋转角度θ,带动△ABC1和△BO1C2在矢状面内做平面运动,从而使两切牙点C1、C2分离呈现开口状态。各连杆长度为:连杆AO2=L=15 mm;连杆BO1=d=100 mm;连杆AB=AC1=a=50 mm;连杆BC1=BC2=b=80 mm;连杆O1C2=c=60 mm。

图2 咬合模拟装置主结构图Figure 2 Main structure drawing of occlusalsimulation device
在实际的咀嚼行为中,不同人的咀嚼轨迹会因自己的口腔生理结构特性而产生差异。为了突出这些轨迹差异,通过改变连杆AO2的长度来调节切牙点的运动轨迹,从而改变切牙点的运动位移。
1.2 力学测量结构
在咬合过程中,咬合力F以斜向力的形式施加在食物块上,为了便于测量食品材料的力学性能并研究食品材料与切牙之间的力学关系,基于切牙的形态结构和功能活动建立了切牙经过简化后的楔形体力学模型。如图3所示,当楔形体与食品材料呈斜向切割时,以水平向右为X轴正向,竖直向下为Y轴正向建立平面坐标系。根据平衡关系,咬合力F可以分解为矢状面内的竖向力和水平力。

图3 咬合力在矢状面内的分解Figure 3 Decomposition of bite force in sagittal plane
在实际操作过程中,很难做到直接在口腔内部放置传感器测量咬合力值,因此基于悬臂梁测力原理对咬合力进行间接测量,图4为力学测量结构:当咬合力产生后,竖直放置的悬臂梁受水平分力FX作用产生变形,从而使粘贴于悬臂梁上的应变片产生应变ε。利用应变仪测量的电信号可以找到FX电信号E的数量关系,即可计算出水平力FX数值。测量竖直分力也利用了同样原理,区别在于承力结构改为了弹性圆环:弹性圆环为圆形环状结构,与上颌平台相切接触,切咬力传递到两者的切点上。竖向分力由弹性圆环承载,弹性圆环因受力产生变形,粘贴在圆环两侧的应变片随之产生应变,利用应变仪可以找到FY电信号E的数量关系。
1.3 运动仿真模拟
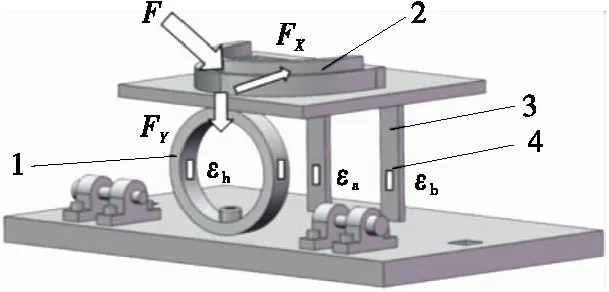
1. 弹性圆环 2. 义齿模型 3. 悬臂梁 4. 应变片图4 力学测量结构Figure 4 Mechanical measuring structure
运用Solidworks软件中的Simulation模块可对装置的运动学进行分析。根据前述设计的机构设置参数并完成运动轨迹仿真模拟,结果如图5所示,此结构可以实现对咬合运动轨迹的模拟,通过替换不同L长度连杆即可完成对模型运动轨迹的调整。取L=15 mm,b=60 mm,调整a的长度时的模拟结果如图5(b)所示。

图5 咬合轨迹模拟Figure 5 Simulation of occlusal trajectory
计算结果为两切牙点的相对位移随时间变化,运动时间设置为4 s。在计算过程中设置了多个变量,每组变量需要计算X、Y两个方向的相对位移。设置L、a、b3个变量组:L设置为10,12,13,14,15,16,18,20 mm;a设置为50,55,60,65,70 mm;b设置为40,45,50,55,60,65,70,75,80 mm。通过控制变量依次计算相对位移。计算结果表明,该结构能够满足竖向最大位移50 mm的测试需要,而且通过改变L长度能够有效地控制咬合轨迹。
2 试验验证
2.1 材料与方法
2.1.1 试验材料
食品材料:选用白萝卜、胡萝卜、黄瓜、饼干、豆腐、熟肉6种常见食品,并切成横截面为15 mm×15 mm的长条状;
义齿模型:邀请5名年龄在24~28岁的男性研究生,由河南德鸿齿科运营管理有限公司制作与其口腔生理结构相同的共5个义齿模型。
2.1.2 主要仪器设备
万能材料试验机:HY-0230微型,上海衡翼精密仪器有限公司;
无线静态应变测试系统:DH3819型,江苏东华测试技术股份有限公司;
咬合模拟装置:郑州恒隆精密制造厂。
2.1.3 咬合模拟试验 利用咬合模拟装置完成对二维咬合力的测量。在进行咬合模拟试验之前,通过标定试验以找出电信号E与力值之间的关系。标定试验在万能材料试验机上进行,得到咬合力值F;无线静态应变测试系统收集电信号E。标定结果如式(1)所示。
(1)
式中:
E——电信号;
Fa——悬臂梁a力值,N;
Fb——悬臂梁b力值,N;
FY——弹性圆环力值,N。
完成标定试验后进行咬合模拟试验。将食品材料置于固定在咬合模拟装置上的义齿中间,旋转手柄带动义齿进行咬合动作即可完成对食品材料的切割。每转动装置完成一次完整的咬合动作时,应变仪同时收集电信号。将收集好的电信号E代入式(1)即可得出对应咬合力值。在测量水平力时,设置了两个同样的悬臂梁,因此需要将两个悬臂梁的力值相加得到最终的水平分力值;竖直方向力值直接由试验得出。
2.1.4 感官评价试验 评价员对食品进行咬合并作出主观感官评价,将评价结果与咬合模拟试验结果进行对比,以验证所设计的咬合模拟装置的有效性。将提供义齿生理结构的5名研究生作为试验的感官评价员。评价员先完成对食品材料的咬合过程,然后基于感官评价规则对自己咬合时的受力感知情况进行主观感官评价。感官评价规则采用计分方式,将咬合时口腔感知到的硬度分为5个等级,分值基于硬度由低到高依次上升1分(见表1)。每位评价员进行重复试验并取平均分作为其对该食品材料的感官评价结果。

表1 感官评价等级Table 1 Sensory rating
2.2 结果与分析
2.2.1 咬合模拟试验 如图6所示,切咬豆腐所需咬合力明显低于其他食品,而切咬豆腐、饼干、熟肉等人工制品的咬合力低于黄瓜、胡萝卜、白萝卜等天然食品。而切咬同一种食品例如黄瓜、胡萝卜、白萝卜等的不同部位的咬合力存在差异,是其内部组织结构不均匀性导致的;而且植物类食品往往具有坚硬的表皮,这也是咬合力产生差异的重要原因。

图6 各种类食品咬合力结果Figure 6 Bite force results of various types of food
2.2.2 感官评价试验 如图7所示,总体上看,随着感官评分的提高其对应的咬合力值也提高,二者变化趋势相同,验证了咬合模拟装置的有效性。咬合力是水平分力与竖直分力的合力,但咬合力的合力曲线与其竖直分力曲线高度重合,而与水平分力曲线数值差异较大。这表明咬合力虽然是矢状面内的斜向力,但主要决定其大小方向的是竖直分力,水平分力对其影响很小。在一定精度内,可以用竖直分力代替咬合力对食品质地进行评价。

图7 感官评价结果与咬合力测量结果关系曲线Figure 7 Relation curve between sensory evaluation andbite force measurement
3 结论
试验研发了一种基于多连杆结构的用于二维咬合力测量的咬合模拟装置,并通过咬合模拟试验与感官评价试验验证了其有效性。该装置以多连杆结构为基础,可以完成在矢状面内的二维咬合力的测量。同时,通过控制连杆长度可以调节装置的运动轨迹,使之能够完成不同的咬合轨迹模拟。
通过咬合模拟试验与感官评价试验可以得知,咬合力随食品材料硬度的提高而上升,且竖直方向的分力起主导作用,在研究食品质地的过程中可以在合理范围内以竖直分力代替咬合力。由于人的咀嚼过程极为复杂,不仅有切牙的咬合,还存在磨牙研磨等三维空间内的复杂运动。在后续研究中,可以分析人的牙齿在三维空间内的运动轨迹,结合力学测量得到各牙位的咀嚼力,并将测量结果与感官评价结果进行对比,验证仪器测量代替感官评价的可行性,为食品质地的评价与研究提供更为有效的思路。
