基于机器视觉技术的壳体表面缺陷检测研究
2022-03-08高文彬庄申乐王秀剑宋冉冉张成雷
高文彬,庄申乐,王秀剑,周 敏,宋冉冉,张成雷,2*
(1.山东龙立电子有限公司,山东临沂,276000;2.临沂大学,山东临沂,276000)
1 引言
随着深水连接装置智能化转型的不断发展,使得电连接器在水下设备的研发上获得更大范围、更深层的实时数据传输成为可能,也为各类电接插件推动海洋安全提供了数据基础。连接器壳体作为连接器外罩,能有效保护其内部绝缘体和接触件,壳体外观质量是评价产品品质的重要指标之一,对其质量评估是产品检测中的重要环节。
目前,国内连接器壳体外观质量检测多依靠人工目测实现,检测效率低、劳动强度大,检测判别的标准因人而异,其漏检率、错检率较高,严重制约了连接器的自动化生产效率,另外人工检测成本较高,不利于企业生产成本控制。基于上述问题,提出了一种运用机器视觉检测技术的壳体表面缺陷检测方法,它在获取缺陷信息和识别缺陷类型方面具有人工不可替代的稳定性和准确性,拓展了现代缺陷检测技术的发展方向。
2 机器视觉缺陷检测系统
完整的机器视觉缺陷检测系统具有机器视觉系统的一般架构,通过图像采集系统获取产品图像,由图像处理模块接收转变成数字信号,然后对数字信号进行预处理、图像增强、缺陷分割、特征提取,最终实现产品的分类[1]。其系统运行流程如图1所示。

图1 机器视觉缺陷检测系统流程图
壳体表面缺陷检测系统的总体设计包括两部分:硬件结构和软件设计。根据功能不同,整个检测系统可划分为五大模块:工业计算机、光学照明系统、图像采集系统、自动检测分类系统、反馈系统[2],如图2所示。

图2 壳体表面缺陷检测系统
3 连接器壳体常见缺陷分类
针对该圆形连接器外壳,其在生产过程中,由于外部环境的变化,如加工人员水平、机床和刀具磨损等都可能导致其产生缺陷,在人工检验过程中常见缺陷类型有点状缺陷、线状缺陷、坑状缺陷等,具体见表1。

表1 人工检验过程中常见缺陷类型
4 图像处理
4.1 图像增强
壳体图像增强是通过一系列特定的处理,解决图像边缘模糊、对比度较弱等问题[3],使图像中感兴趣的的部分凸现出来,同时去除图像中某些不需要或是不重要的信息。常用的图像增强技术有直方图变换均衡化和分段式变换修正方式,对灰度部分进行规定化处理。
直方图变换均衡化是运用某些特殊化处理,将一部分图像的灰度级增强,可以有效规避均匀化直方图。很好的解决原始壳体图像中边缘化模糊问题,并且可以显著的增强图像的对比度和清晰度,如图3和4所示。

图3 原始直方图

图4 均衡化后的直方图
分段线性变换法是常用来扩展感兴趣部分的灰度变化范围函数,对不感兴趣的图像区域进行抑制和削弱[4],通过动态调节图像中不同灰度值间的范围参数来增强图像中相的反差,进一步增强图像间的对比度,其表达式如公式(1):
(1)
其中,g(x,y)为变换后图像,灰度范围数值[0,Mg],原始图像为f(x,y),灰度范围数值[0,Mf],变换后函数图像如图5所示。

图5 分段线性变换图
由变换后的函数图像可知,通过控制分段直线的斜率或调整函数图像转折点的位置,可压缩或扩张分段区间内的灰度值范围,当[a,b]区间内的直线斜率大于1时,可增加该区间内的灰度值范围,也即增强图像的对比度。另外,对两个区间内的灰度值进行压缩后,可实现图像增强效果。
4.2 缺陷图像分割
为了能完整的把壳体缺陷图像与背景图像分割出来,使下一步对区域轮廓的提取工作更加彻底与精确,本文决定采用OSTU阈值化分割算法和小波变换算法。OSTU阈值化分割算法使用的条件是目标与背景间的多类间方差化最大,可以使图像被错误分割的概率最小,由于该方法是基于二维灰度直方图,所以也称二维OSTU阈值分割法,针对直方图中波峰和波谷明显的图像,其分割效果非常好。小波变换算法是在傅里叶变换的基础上发展起来的,其在图形模糊快速计算中的应用十分重要,针对直方图中峰谷不明显区域分割效果很好,并对每一类特征值进行归一化处理。结合二维OSTU阈值分割算法和小波变换算法的分析计算,可以大大降低噪声和残余背景对图像分割的影响,得到具有缺陷的图像,如图6所示。

图6 分割后的缺陷图像
4.3 缺陷特征提取
图像的特征提取是通过一些数学模型描述图像的纹理信息,是对图像中灰度级变化的数字化表达,公认的缺陷提取方法是简单、常用的灰度共生矩阵(GLCM)算法。
灰度共生矩阵能够灵活的描述纹理更为细微的特征,从中提取角二阶矩、对比度、熵、面积和周长等5种特征参数具体描述图像纹理变化。
(1)角二阶矩Asm(或称能量)
(2)对比度Con
(3)熵Ent

(4)面积S
(5)周长L
L=∑(x,y∈R1
本文根据根据上述计算公式,随机抽取5个样本的缺陷参数进行纹理特征统计,实验数据如表2所示。

表2 抽取的样本纹理特征(单位:像素)
针对点状缺陷、线状缺陷和坑状缺陷的纹理特征进行提取,从表2中可以得出,三种缺陷的角二阶矩、对比度、熵、面积和周长有明显的不同:点状缺陷集中在4像素、1像素、2像素、320像素和60像素左右,线状缺陷集中在3像素、4~5像素、1.5像素、1200像素和460像素左右,而坑状缺陷集中在2.5像素、7像素、0.6像素、900像素和160像素左右。由此可见,该5种特征参数对三种缺陷的区分效果较为理想,这些特性可以作为壳体缺陷分类识别的依据。
5 BP神经网络缺陷识别与分类
5.1 壳体表面缺陷识别网络模型的建立
图像的采集、预处理和特征提取等工作完成后,需要建立针对缺陷识别与分类的分类器。本文分类器的设计是基于BP神经网络的模式识别算法。
该神经网络模型在用于缺陷分类时,需要先进行自学习,使网络模型能够自行区分缺陷特征量和相对应的缺陷类型[5],学习结束后就可以利用学习结果实现对具有相同特征的缺陷分类。如图7所示,为三层BP神经网络实现壳体缺陷分类器设计流程图。

图7 三层BP神经网络实现壳体缺陷分类器
5.2 隐含层节点的确定
一般情况下,若隐含层拥有的节点数越多,精度越高,训练时间更长,容易导致误读和泛化能力下降;反之精度降低,训练时间减少,学习过程发散,无法确定最优值[6]。在实际应用中,保证可以正确反映输入输出关系时,隐含层节点数越少越好。本文使用图像采集处理后得到的200组数据,确定隐含层最优节点个数如表3所示。
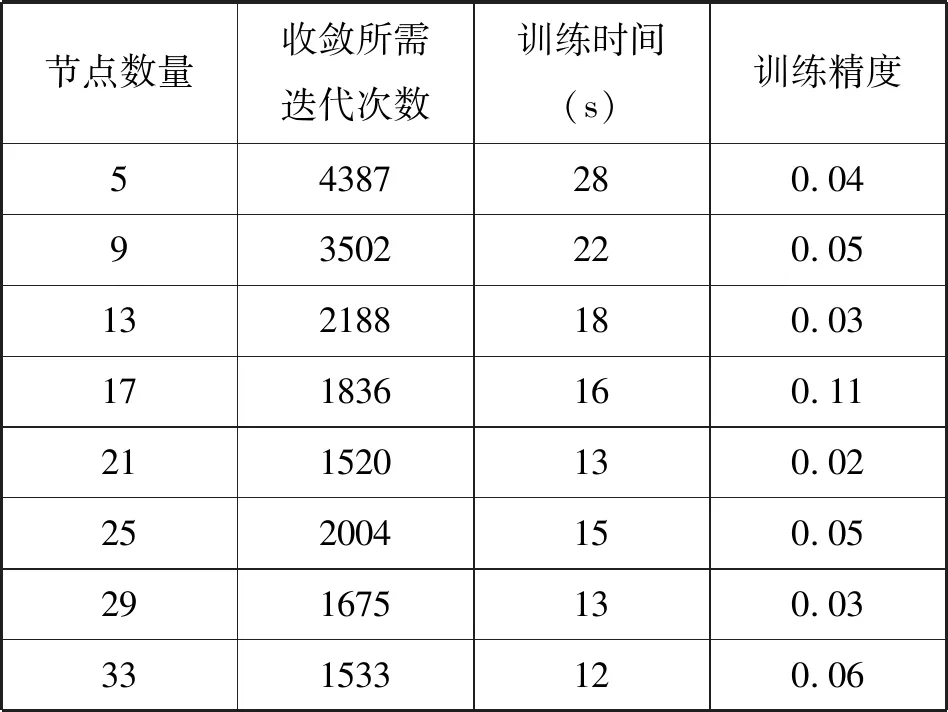
表3 隐含层节点个数与训练时间和精度的关系
从表3可以得出,当隐含层的节点数达到21时,训练时间短,训练精度最高,考虑到系统收敛速度和泛化能力,选定隐含层节点数为21。
5.3 学习率的确定
学习率η也称为步长,主要用来改变阈值、权值和修正量。在标准BP神经网络算法中定为常数,然而在实际应用中,学习率选得过小,收敛速度太慢;学习率选得过大,则有可能修正过头,导致振荡甚至发散,无法收敛,通常将其范围设置为0.01~1。本文多次对BP神经网络进行训练学习,表4为学习率和迭代次数的关系。

表4 学习率和迭代次数的关系
由表4可知,学习率η在[0.01,1]范围变化时,迭代的次数是先减少后增加,当学习率为0.8时,迭代的次数最少,收敛的速度也最快。综上可知,设定系统学习率为0.8。
5.4 壳体表面缺陷分类的实验验证
本文选取不同类型缺陷的100个样本进行训练,另取点状、线状、坑状缺陷各50组样本作为测试样本,运用BP神经网络分类器对壳体表面缺陷图像进行分类,结果如表5所示。
由表5可以得出,该分类器对点状、线状、坑状缺陷的识别和分类有很好的效果,三种缺陷的识别率分别高达96%、92%、96%,由此可见该系统具有很高的识别精度。

表5 神经网络识别缺陷结果
6 结论
针对壳体表面缺陷的特点,将壳体表面缺陷划分为点状、线状和坑状三种类型,通过对所获得的壳体缺陷图像处理和分类,采用直方图均衡化和分段线性变化增强图像;二维OSTU阈值分割算法和小波变换算法进行图像阈值分割;基于灰度共生矩阵的纹理特征计算法对壳体表面缺陷进行特征提取,并构造了BP神经网络缺陷分类器,实验验证结果表明,该分类器具有很好的识别与分类精度。
