基于驾驶意图识别的插电式混合动力汽车智能算法研究
2022-03-03赵金宝校金龙
赵金宝, 校金龙
(河南工业贸易职业学院, 郑州 450000)
不同的驾驶行为对车辆的燃油经济性有很大影响,在同样工况下,不同驾驶员驾驶同样的车辆,燃油消耗差别可达到20%~30%。对插电式混合动力汽车(PHEV)而言,由于有多种动力源和不同的工作模式,其影响更加明显。
本文先制定基于规则类的定参数控制算法,优化并确定其参数。然后在此基础上增加驾驶意图识别模型,建立能够自动识别驾驶模式,并对输出扭矩进行修正的智能控制算法,以提高PHEV对驾驶员的适应性和燃油经济性。
1 定参数控制算法及优化
1.1 动力系统构型及整车主要参数
本文以一套单轴混联式混合动力系统为研究对象,发动机、ISG电机、驱动电机在同一轴上,通过离合器是否结合实现不同的工作模式。此系统可以实现串联、并联、纯电动、制动能量回收等多种模式。
整车的基本参数如下:整备质量12 500 kg;满载质量18 000 kg;长11 900 mm、宽2 550 mm、高3 150 mm;车轮静态半径452 mm;迎风面积6.6 m;空气阻力系数0.55;滚动阻力系数0.009 8;发动机功率147 kW;ISG功率80 kW;主电机功率144 kW;电池电量13.8 kW·h、电压460 V;超级电容电量0.37 kW·h、电压384 V;双向DC-DC功率50 kW;主减速器速比5.77。
1.2 基于规则类的定参数控制算法
该车一开始采用的基于规则类的定参数能量控制算法如下:
1) 动力电池SOC≥0.3,CD(电量消耗)阶段。若行驶需求转矩介于发动机最小转矩和发动机最大转矩之间,发动机单独驱动,工作在发动机开启区间;若>,发动机和电动机混合驱动,发动机工作在最大转矩;若电动机转速在800 r/min 以下或<,由电动机单独驱动车辆。具体如图1所示。

图1 动力电池SOC≥0.3 CD阶段策略
2) 动力电池SOC<0.3,CS(电量维持)阶段。若≤,发动机工作在最小转矩,多余转矩带动ISG电机发电;若介于和之间,发动机工作在最大转矩,多余转矩带动ISG电机发电;若电动机转速在800 r/min以下,由电动机单独驱动车辆行驶。具体如图2所示。
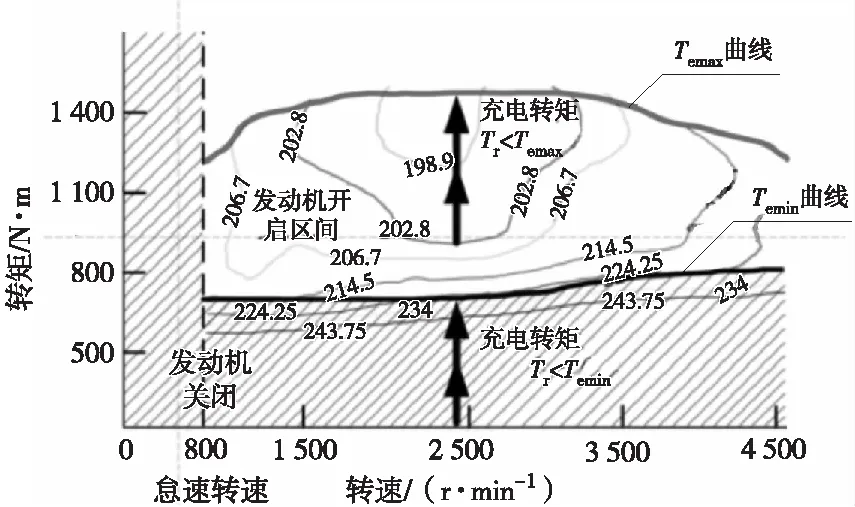
图2 动力电池SOC<0.3 CS阶段策略
1.3 定参数控制算法参数优化
为提高燃油经济性,从对PHEV的燃油经济性影响程度选取优化参数。为离合器1的结合转速,决定着发动机启动转速和实际工作状态,选取范围为650~1 000 r/min;为超级电容放电区间的最小值,决定着超级电容是否放电,选取范围为0.5~1;为超级电容的放电系数,决定着超级电容的放电速率,选取范围为0.5~1;为DC/DC降压的电流调节系数,决定着动力电池的放电功率,选取范围为0.5~1;为超级电容充电区间的最小值,决定着超级电容是否被充电,选取范围为0.5~1。
采用模拟退火算法对综合油耗进行优化,其数学模型为


本文优化平台选取Isight,将整车模型及控制算法集成到此环境下进行自动优化,表1为优化前后的控制参数。

表1 优化前后控制参数
定参数能量控制算法参数优化前的油耗为16.72 L/100 km、电耗为10.17 kW·h/100 km,综合油耗为20.1 L/100 km。优化后油耗为15.94 L/100 km、电耗为9.21 kW·h/100 km,综合油耗为19 L/100 km。
2 智能控制算法研究及仿真分析
2.1 驾驶意图模糊识别模型
2.1.1 驾驶意图识别架构
构建智能控制算法,首先要进行驾驶意图识别。驾驶意图识别架构如图3所示。

图3 驾驶意图识别架构
模糊控制算法可以根据操作经验制定的控制规则,经过模糊推理,准确得出控制量。影响车辆动力性、经济性的驾驶操作不外乎是油门开度、制动踏板开度及它们的变化率。而开度及其变化率作为模糊识别的输入对驾驶意图进行识别。考虑到工况块的平均长度及硬件的实时处理能力,本文选取过去100 s内的平均油门开度、制动踏板开度及它们的平均变化率,可以更好地识别出驾驶员的意图。
2.1.2 加速模式识别
油门踏板开度及其变化率能够反映出驾驶员是否加速以及加速紧急程度,因此油门踏板开度及其变化率两个变量作为加速模式识别模糊控制器的输入,模糊识别模型的输出为转矩修正系数。根据加速紧急程度的不同,可分为紧急加速、一般加速、平缓加速。
油门踏板变化率有较大波动,容易造成模式的频繁切换,因此选取平均值作为模糊识别的输入。选取时间太长又不能准确反映出驾驶的加速模式,本文选取1 s内的平均值来识别加速模式。
平均油门踏板开度及其平均变化率的隶属度函数如图4所示。

图4 油门踏板开度及其变化率的隶属度函数
加速模式识别模糊推理规则见表2。
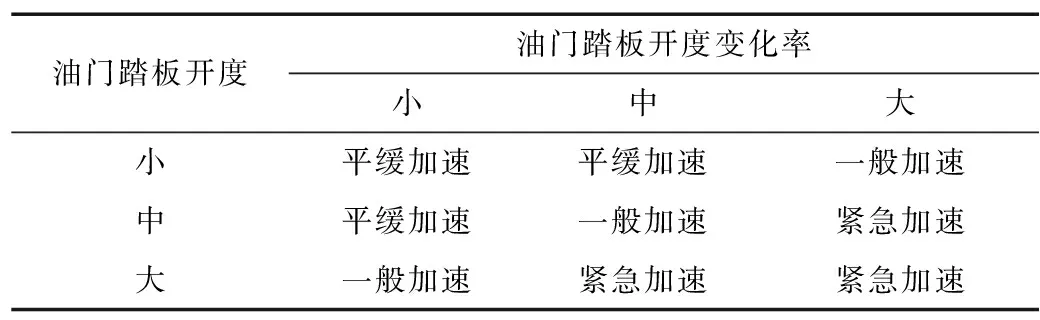
表2 加速模式识别的模糊推理规则
2.1.3 制动模式识别
制动踏板开度及其变化率能够反映出是否实施制动以及制动紧急程度。因此将制动踏板开度及其变化率两个变量作为制动模式识别的输入,模糊识别模型的输出为制动转矩修正系数。根据制动的紧急程度不同,可分为紧急制动、一般制动、平缓制动。
制动踏板变化率同样有较大波动,在考虑安全性、经济性及舒适性的基础上,同样选取1 s内的平均值来识别制动模式。
平均制动踏板开度及其平均变化率的隶属函数如图5所示。
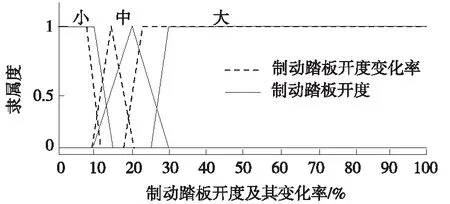
图5 制动踏板开度及其变化率的隶属度函数
制动模式识别模糊推理规则见表3。

表3 制动模式识别模糊推理规则
2.2 智能控制算法
智能控制算法的具体过程如图6所示:在优化后的定参数算法的基础上再增加驾驶意图识别模型,根据其识别出来的驾驶模式,适当地加大或减小输出扭矩;如果识别出来是急加速,则转矩修正系数>1,输出扭矩增大(实际输出扭矩=正常扭矩×系数),以更好地适应驾驶需求;若是平缓加速,则<1,输出扭矩减小。图中为修正后的整车需求转矩。
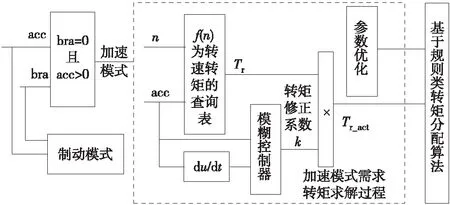
图6 智能控制算法具体过程
2.3 仿真分析
在CRUISE建立整车模型,在MATLAB/Simulink中制定控制算法,分别对控制参数优化后的定参数及智能控制算法进行仿真分析。选取曼哈顿城市拥堵工况、中国典型城市公交工况、NEDC市郊工况组成的综合工况进行仿真,如图7所示。为使混合动力系统的各种工作模式都出现,选取4个循环的综合工况。CRUISE当中的驾驶员模型以综合工况的车速为目标,通过对油门、制动踏板进行操作,自动跟随目标车速。

图7 曼哈顿城市拥堵、中国典型城市公交、NEDC市郊组成的综合工况
图8为SOC随行驶距离的变化趋势,从图中可以看出,采用定参数控制算法,系统较早地进入CS模式;采用智能控制算法,系统SOC变化平缓,经过4个综合工况(1个综合工况时长为3 573 s,4个综合工况时间轴为14 292 s)后SOC为35%,动力电池的能量得到了更加合理的利用,因此智能控制算法更好。

图8 SOC随行驶距离的变化
图9为PHEV在定参数和智能控制算法下对应的整车需求转矩与车速关系局部图,在1 120~1 130 s车速平缓变化时,定参数控制算法计算出的整车需求转矩较大,与实际不相符,而智能控制算法识别出平缓加速,整车需求转矩较小,整车输出转矩修正系数对输出转矩进行校正,使其更加合理且可提高燃油经济性。在1 160~1 165 s车速较快变化时,定参数控制算法计算出的整车需求转矩较小,与实际不相符,而智能控制算法识别出紧急加速,整车输出的转矩修正系数对输出转矩进行校正,使整车需求转矩更加合理且满足整车动力性需求。

图9 需求转矩与车速局部图
图10为智能控制算法及定参数控制算法主电机负荷与车速关系的局部图,可以看出,在2 295~2 302 s车速减小较快时,定参数控制算法计算出的制动需求扭矩较小,与实际不相符,而智能控制算法能够识别出紧急制动,从而增大主电机负荷,增多制动能量的回收。

图10 主电机负荷与车速局部图
智能控制算法对应的油耗为15.63 L/100 km、电耗为7.77 kW·h/100 km,综合油耗为18.18 L/100 km,相较于控制参数优化后的定参数控制算法对应的综合油耗19 L/100 km而言,采用智能控制算法使PHEV燃油经济性提高了4.3%。
智能控制算法能够根据识别到的驾驶意图适当放大或缩小驱动及制动扭矩,使扭矩的分配更加合理,使其更加符合驾驶需求且有效提高了燃油经济性,体现了智能控制算法的优势和好处,因此应采用智能控制算法作为最终的应用。
3 结束语
根据油门、制动踏板开度及其变化率对驾驶员意图进行模糊识别,并对控制参数进行了优化。基于驾驶员意图识别的智能控制算法,使得整车电量、需求转矩得到更加合理的利用,增强了车辆对驾驶员的适应性且燃油经济性进一步提高。
