基于飞机运行数据的高度飞行控制模拟研究
2022-03-01刘家学王文宰
刘家学,王文宰
(中国民航大学电子信息与自动化学院,天津 300300)
1 引言
高度飞行控制模拟是飞行仿真研究中十分重要的环节,其在飞机性能展示、飞机品质提升等方面得到了广泛的应用[1,2]。但是受到干扰信号、天气条件等因素的影响,飞机飞行会受到一定的限制,为提升高度飞行控制效果,相关研究人员设计了一些方法[3]。
文献[4]提出一种基于增强学习的变体飞行器自适应变体策略与飞行控制方法,将Firebee无人机作为主要研究对象,利用DATCOM计算飞机飞行的气动数据,根据得出的数据进行气动分析。参考分析结果,基于增强学习理论,设计变体飞行器翼型自适应控制方法。实验结果表明,该方法能够保证飞行器在多任务状态下均保持较优的飞行性能,且控制误差较小,但是在该方法控制下飞机飞行高度保持时间较短。文献[5]提出一种伞翼无人机线性自抗扰高度控制方法。构建伞翼无人机飞行动力学模型,并模拟真实飞行环境。估计线性扩张状态下观测器对无人机产生的扰动,同时引入误差反馈率在控制中进行补偿。实验结果显示:该方法能够解决干扰因素的影响,具有较好的抗扰能力,但是控制成本较高,实用性不强。除上述方法外,还有研究利用群体智能算法,通过迭代寻优获取对应的控制参数,从而实现高度飞行控制。但是,该方法没有得到机型数据包,导致无法获取准确的飞行控制参数,也无法确保飞机的真实控制特性[6]。
针对上述问题,设计基于飞机运行数据的高度飞行控制模拟方法。通过具体的仿真实验数据验证了所提方法的有效性以及优越性。
2 模糊控制器设计
结合模糊控制原理可知,飞机高度飞行整个控制过程主要可以划分为四部分,分别为:
1)被控对象反馈信号数据的采集;
2)将步骤1)中采集到的信号数据与目标给定值进行相减,获取误差信号数据,同时进行A/D转换,将转换后的数据打包成数据包,并且将其发送至计算机;
3)通过模糊控制器获取对应的控制量;
4)将经过A/D转换的模拟控制信号数据发送至执行机构。
综合分析以上操作过程可知,模糊控制器是整个控制过程的核心环节,因此对其进行重点设计,将其划分为:清晰量模糊化、模糊规则的触发、模拟推理以及模糊量清晰化处理。
结合上述分析可知,模糊控制的实现能够划分为以下四个操作步骤,具体如下所示:
1)完成反馈信号数据的采集,同时将其与目标值两者进行作差,获取系统输出信号;
2)将清晰信号数据进行模糊化处理;
3)通过相关理论以及相关规则,获取系统模糊变量,对其进行去模糊处理;
4)将系统中清晰的数字量全部发送到与其相对应的执行结构中;
结合上述分析,以下详细给出模糊控制器的设计过程:
1)模糊控制器的结构设计:
在实际应用过程中,模糊控制的设计灵感主要来自于手动操作行为,主要利用模糊控制器完成对应行为的模拟。由于操作环境的不同,导致控制指标完全不同,本文主要选取三个指标作为判定依据:优化前后的运行时间、飞机飞行高度保持时间和运行成本。
2)模糊控制规则的设计:
整个模糊控制器最为关键的部分即为模糊规则,结合上述分析可知,模糊规则[7-8]的设定需要针对控制器中的输出以及输入进行准确的划分,并且需要确定模糊变量中的模糊子集,组建模糊控制器的模糊规则。模糊规则主要由两个不同的部分组成,分别为前提部分、结论部分。
3)清晰量的模糊化方法:
将控制器中清晰的数字量转换成模糊语言词集的过程就是所谓的模糊化。
根据上述原理,得出在离散域上,PID控制器的具体表现形式为
(1)
式中,Td代表采样间隔;Kpd代表对应的比例;KId代表积分;KDd代表微分增益常量。
采用PID控制器的离散形式对初始阶段的控制误差值进行求和,由于求和过程十分复杂,因此采用增量形式作为控制器的输出,则有:
(2)
为了模拟上述公式描述的离散形式,需要设定模糊控制的输入为e(k)、Δe(k)、Δ2e(k),则输出为Δu(k)。
结合上述分析得出模糊控制器输出的具体计算式为

(3)
联立式(2)和式(3),则有

(4)
由于PID型控制器是三维的,三维模糊控制器的操作过程十分繁琐,在实际应用的过程应用效果不佳。结合上述分析,重点针对二维PID模糊控制器展开研究。PID型模糊控制器的模糊模拟步骤主要划分为以下两部分:
1)通过分析以及观察获取模糊控制器的输入误差以及误差变化量的论域。在论域空间中,能够将模糊控制器的两个输入变量分别量化为七个线性分布的三角形模糊集合,其中传递函数能够表示为以下的形式

(5)
模糊规则前提部分主要采用取小运算,并通过重心法解模糊[9],其中模糊控制器的清晰解能够表示为以下的形式
(6)
综上所述,完成了模糊控制器的设计。
3 运用粒子群算法寻优控制系数
在模糊控制中,其中对控制性能影响较大的系数主要包含以下两方面:比例系数以及抑制系数。运用通过模糊控制器获取的数据包,结合相关的误差积分准则,将飞机高度保持控制开始工作后的当前时间反馈高度与QAR数据中高度偏差绝对值的积分作为目标函数[10],则能够获取以下关系式

(7)
根据式(7)中的目标函数,采用粒子群算法完成控制参数寻优。在D维空间中,由m个粒子完成个体的组建。不同粒子在进行搜索的过程中,需要结合相关的先验知识以及飞行经验进行动态调整,其中粒子位置以及速度的计算式如下所示

(8)

(9)
式中,c1、c2分别代表不同的学习因子;r1、r2代表[0,1]范围内的随机数。
结合上述分析,动态调整飞行惯性权重,则线性递减的公式能够表示为以下的形式:

(10)
在粒子群算法中加入压缩因子,以有效避免粒子在早期陷入局部最优或者早熟的现象,所以带有压缩因子的粒子速度更新式能够表示为以下的形式

(11)
其中

(12)
学习因子取值的大小会对自身的学习能力以及社会全体的相关经验产生不同的影响。如果粒子不存在自身经验,则说明粒子的收敛速度较快,粒子容易陷入局部最优;反之,如果粒子存在自身经验,则说明各个粒子之间不存在信息共享,同时粒子达到全局最优的概率为0。为了有效提升粒子的收敛速度,同时加快获取全局最优解,两个学子因子的取值就不能够为0。结合上述分析,以下选用异步变化的学习因子进行控制系数寻优,则有

(13)
粒子群算法主要选用MATLAB软件进行对应程序的编写程序,然后运行程序获取最优的参数值[11,12],将对应的参数值转移到飞机中,实现飞机高度飞行的控制,以下给出具体的寻优过程:
1)数据初始化处理
读取模糊控制器,设定种群、权重等相关参数的迭代次数,设定模糊规则中权重的上限以及下限;
2)对粒子群进行初始化处理
将算法中的比例因子粒子群体进行量化处理;
3)计算初始化粒子的适应值
分别计算不同粒子对应的量化因子赋值参数;同时将模糊规则导入到对应的模糊规则中。分析相关模块,获取不同模块的适应值,并将其赋值给最优粒子中;
4)主循环
更新不同参数,获取全部粒子的最优解,同时更新学习因子;
5)判定
判断算法是否达到最大迭代次数;如果达到要求,则输出最优解;反之,则返回步骤4)。
图1为控制系数寻优流程图。
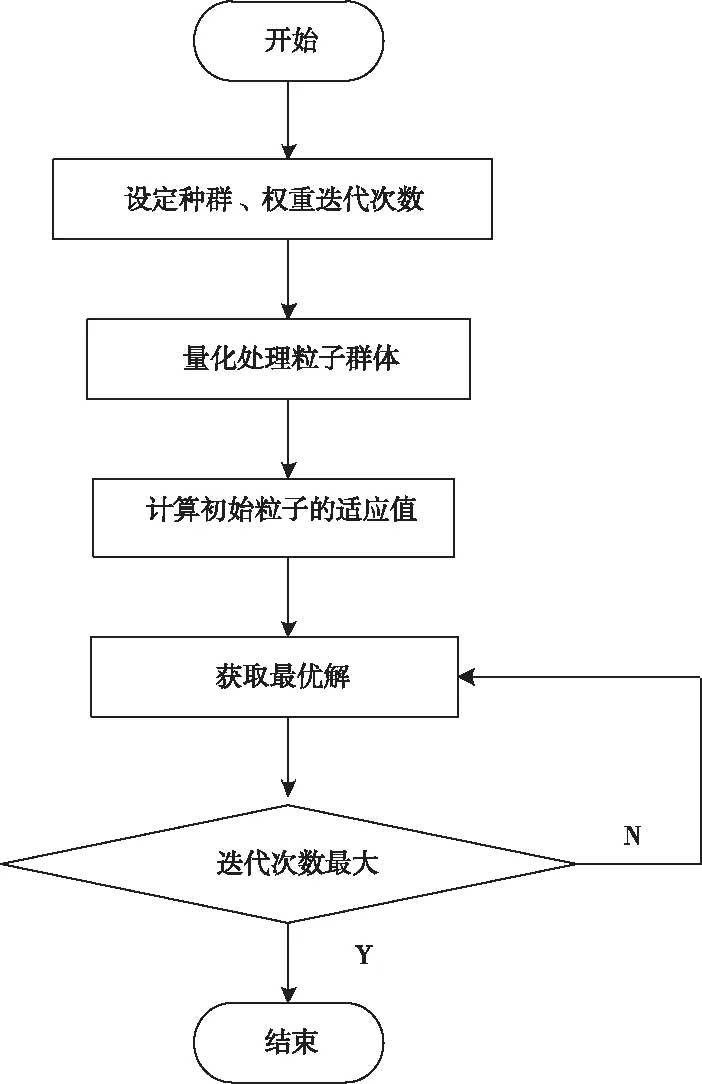
图1 基于粒子群算法的控制系数寻优流程
综上所述,完成了高度飞行控制。
4 仿真研究
为了验证所提基于飞机运行数据的高度飞行控制模拟方法的综合有效性,需要进行仿真。实验选取A320机型作为研究对象,并设定不同的采样周期。以优化前后飞机运行时间、飞机飞行高度保持时间和运行成本为指标对比本文方法与文献[4]方法和文献[5]方法的不同,具体结果如下。
1)不同方法优化前后运行时间(min)变化情况
以下分别对比各种方法优化前后的运行时间变化情况,具体的对比结果如下表所示:
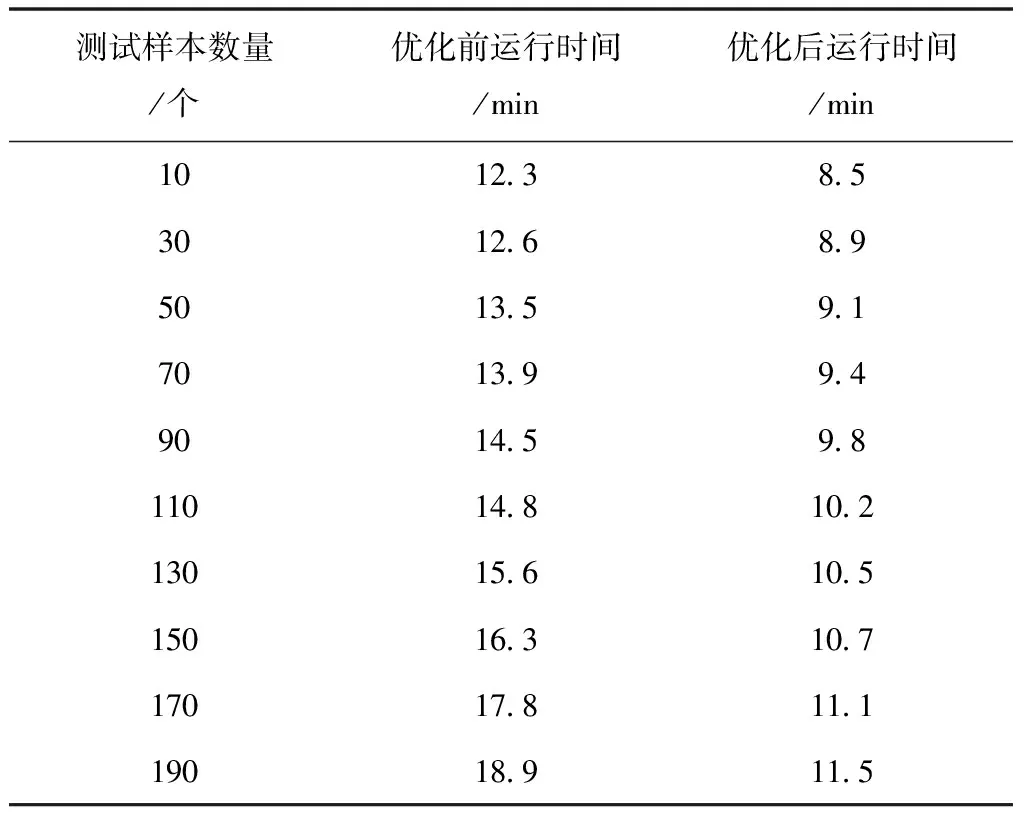
表1 所提方法优化前后的运行时间变化情况
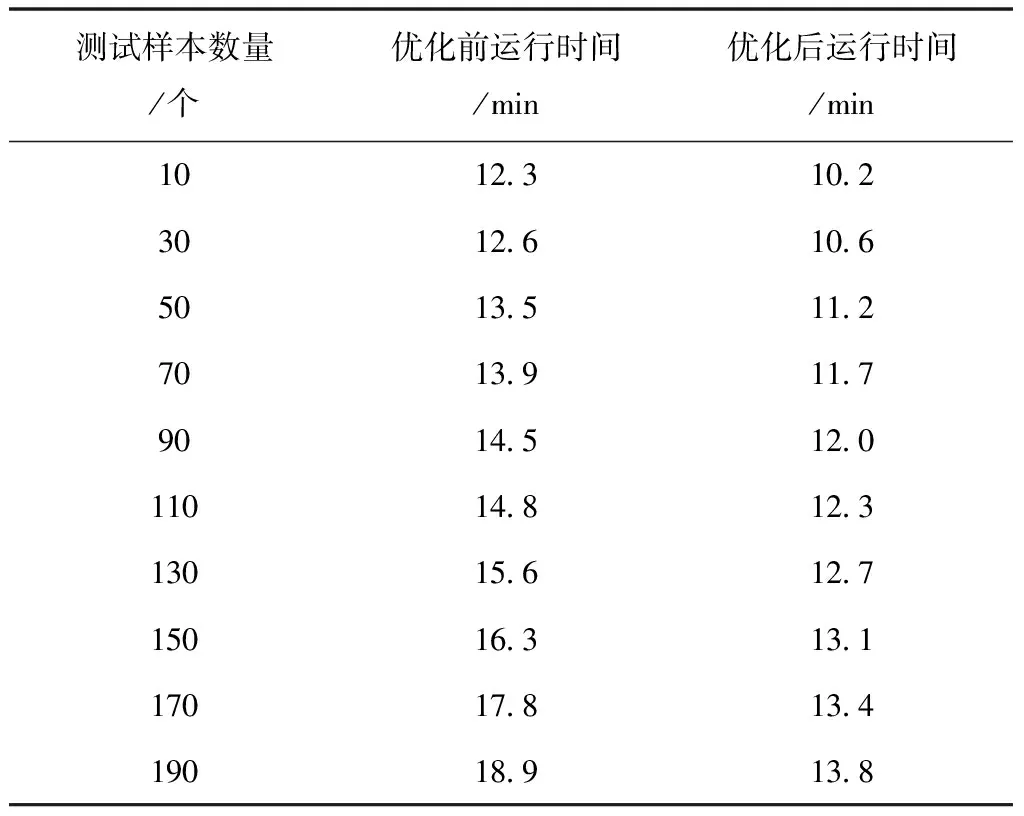
表2 文献[4]方法优化前后的运行时间变化情况
分析表1至表3的实验数据可知,设定各个方法优化前的运行时间是相同的,经过优化处理后,各个控制方法的运行时间均有下降趋势,其中所提方法的运行时间在三种方法中为最低;文献[4]方法的运行时间次之;文献[5]方法的运行时间最高。实验数据充分说明,所提方法具有较高的运行效率。这是由于所提方法在模糊控制器设计过程中,采集被控对象反馈信号数据,并对误差信号数据进行A/D转换,将转换后的数据打包成数据包进行输出可以避免数据分散输出所消耗的时间,从而提升了运行效率。

表3 文献[5]方法优化前后的运行时间变化情况
2)飞机飞行高度保持时间/min
为了更进一步验证所提方法的有效性,仿真测试选取飞机飞行高度保持时间作为评价指标,其中飞机飞行高度保持时间越长,则说明控制效果越好;反之,则说明控制效果不理想,以下分别给出三种方法飞机飞行高度保持时间对比结果,如图2所示。

图2 不同方法飞行高度保持时间对比结果
综合分析上图实验数据可知,所提方法下飞机飞行高度保持时间最长达到了4.8min,而文献[4]方法下飞机飞行高度保持时间最长为3.9min,文献[5]方法下飞机飞行高度保持时间最长为4.4min。分析上述数据可知,所提方法的控制效果明显好于其它两种方法,其最主要的原因在于,所提方法选取粒子群算法对控制器中的相关参数进行了优化处理。
3)运行成本/万元
在上述实验环境下,以下对比三种方法的运行成本变化情况,具体的对比结果如表4所示。
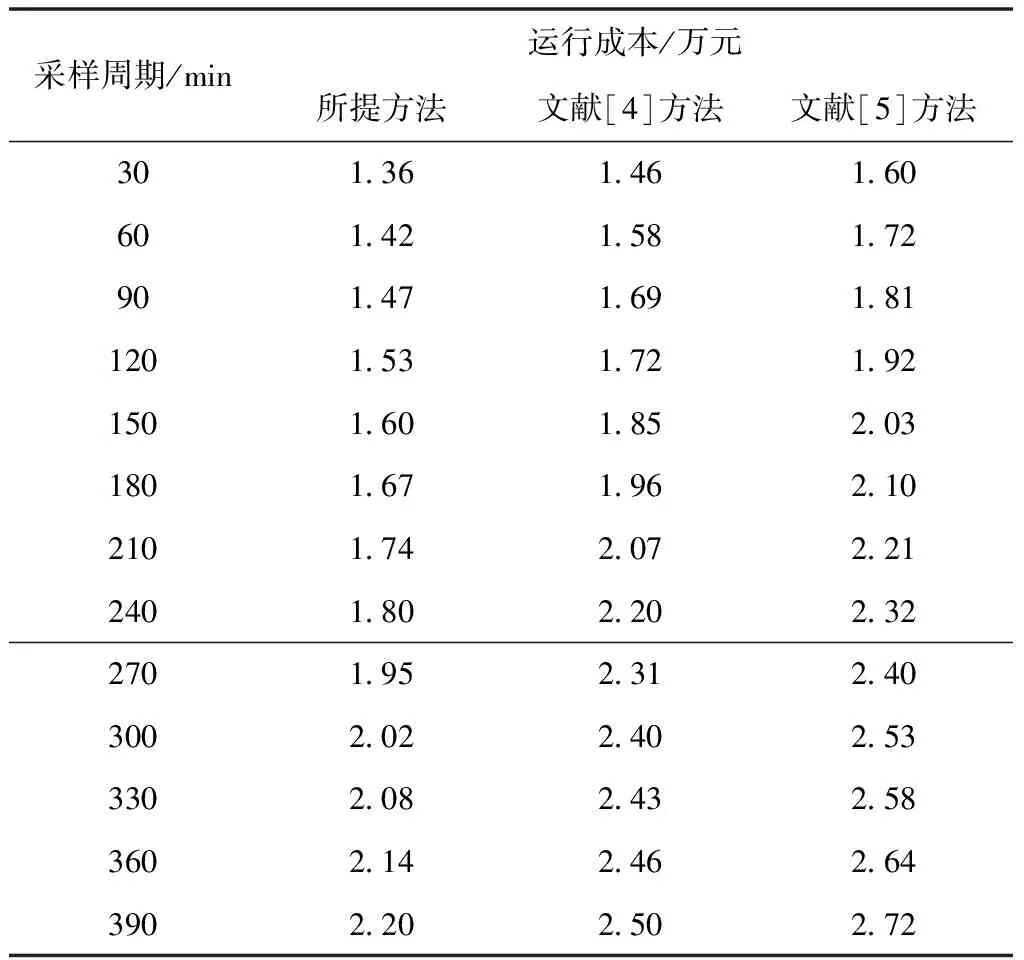
表4 不同方法运行成本变化情况
综合分析以上表格实验数据可知,相比其它两种方法,所提方法的运行成本明显较低,说明该方法能够节省控制成本,具有较高的实际利用价值。
5 结束语
针对传统方法下飞机飞行高度保持时间较短,控制成本较高的问题,提出基于飞机运行数据的高度飞行控制模拟方法。该方法通过数据转换,并以数据包的形式进行数据输出,以此来提升运行效率。同时,采用粒子群算法对控制器中的相关参数进行了优化处理,实现飞机飞行高度保持时间的提高。实验选取A320机型作为研究对象,实验结果表明,所提方法能够有效增强控制效果,同时能够降低运行成本,并且具有较好的稳定性。
