基于YUSENSE MAP高效预处理无人机高空间分辨率多光谱影像
2022-02-27尹宝田
摘要:本项目以沈阳市周边受虫害影响的林地作为研究对象。为了能够实现高精度监测林地中小图块受虫害影响的面积,采用飞图横空6A复合翼无人机作为飞行平台,MS600多光谱传感器作为载体,获取研究区优于20厘米空间分辨率的多光谱影像。空间分辨率越高,影像越大,数据处理效率就越低。本项目采用Yusense Map软件经过生成配置参数、配准、拼接、定标等几个步骤可高效的得到研究区具有真实地面反射率的多光谱影像。
关键词:Yusense Map;多光谱;无人机
森林不仅具有重要的环境属性,而且还具有重要的资源属性。林地健康的破坏一方面受人为影响,尤其是当前物流行业的不断扩大。另一方面现代化工业规模不断扩大也导致污染程度逐渐提高。松材线虫病严重影响着我国的林地健康、生态安全和社会安全,必须对其进行科学的监测,时刻掌握林地的健康状况,及时制定有效机制。遥感数据的质量直接影响着后期数据的准确性,经过不断的探索与实验,从结果中逆向推理出采用Yusense? Map软件处理MS600无人机高空间分辨率多光谱数据效率高、结果真实可靠。
MS600型通用多光谱相机可实现最多6个通道光谱图像数据的同步获取,本案例选用蓝、绿、红、红边、以及2个近红外波段共6个通道。该型传感器包括相机主机、下行光传感器(以下简称“DLS”)、GPS模块。主机主要实现相机工作模式和参数的配置,光谱图像数据的获取和存储;DLS主要在飞行过程中同步测量相机6个通道对应的环境光,并记录在获取图像的元数据中,可用于校正飞行过程中出现少量云层对光线的短暂遮挡,减小对图像数据获取的影响;GPS模块主要为相机提供地理坐标信息,并也同时记录在获取图像的元数据中。
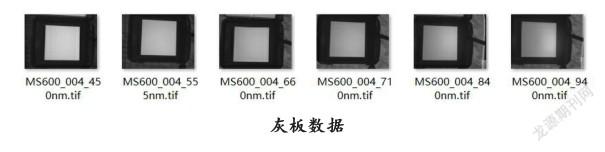
多次实验证明为了使用 MS600通用多光谱相机更加有效精确的采集多光谱图像数据,当规划航线触发发射时,确保相机“MS600”字样与飞行方向保持一致,DLS模块、GPS模块的箭头所指方向与飞行方向保持一致;飞行前保证镜头窗口清洁;GPS模块接收信号质量良好;航向和旁向重叠度不低于75%;至少有1条航线超出规划飞行采集区域的边缘,确保边缘数据有效;确保相机视轴天顶10°范围内变化,并垂直地面;每次飞行前后立即通过灰板进行标定。本案例是在晴朗的天气条件下,采用飞图横空6A复合翼无人机作为飞行平台挂载MS600多光谱传感器获取沈阳市周边具有虫害影响的有代表性数据,研究区面积1500亩,共获取影像10752张。

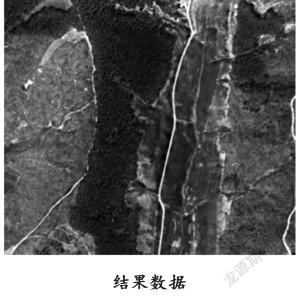
通过影像内置GPS新建工程,选择5~10张具有代表性图像,在相机参数设置中实现空中三角测量、自动转点等工作最终输出虚拟相机参数。通过生成的虚拟相机参数将所有影像完成影像内定向、波段配准,该过程无需人工干预,最终成果是同一影像的6个波段将会被配准。通过空中三角测量、概略DSM、单片正射影像、镶嵌正射影像完成影像拼接,最终拼接成一张图。最后通过辐射定标完成标定工作,得到研究區具有真实地面反射率的遥感影像。
飞图横空6多光谱遥感系统航时长,数据获取效率高;MS600型通用多光谱相机可实现最多6个通道光谱图像数据的同步获取,可满足多行业应用;下行光传感器可用于校正飞行过程中出现少量云层对光线的短暂遮挡,减小对图像数据获取的影响;Yusense?Map软件经过生成配置参数、配准、拼接、定标等几个步骤可高效的得到研究区具有真实地面反射率的多光谱影像;当应用场景最大高差超过航高20%的农田、乡村、河道、丘陵等地区低空遥感,拼接结果会出现扭曲变形或漏片的现象,可通过编辑点云、编辑DEM、影像修剪进行修复。
立项单位:辽宁生态工程职业学院教科研部。
主持人:尹宝田。
课题《无人机高空间分辨率多光谱遥感森林病虫害监测分析应用研究》的阶段性成果。