矿井提升设备电控系统设计要点分析
2022-02-24王进峰
王进峰
(山东丰汇设备技术有限公司,济南 250200)
0 引言
矿井提升设备是矿用的一种提升煤炭、矿石、升降材料和设备的机械设备,是矿山井下生产时地下作业面和地上作业面相连接的枢纽设备,是特种机械设备的一种,在采矿领域发挥着重要的作用[1-2]。
随着电力电子技术的发展,PLC和变频器电控系统被逐步应用到矿井提升设备和各类型起重机设备上,提升了设备的控制性能和自动化程度[3-6]。但随着用户对矿井提升设备“自动化”和“智能化”程度的要求越来越高,设计人员在复杂而繁琐的控制系统设计过程中很容易出现某些方面的疏忽,疏忽轻则可能会影响设备的使用性能,重则可能出现重大安全生产事故。为确保矿井提升设备电气控制系统运行的安全性和可靠性,本文针对矿井提升设备电气控制系统设计过程中存在的问题及关键环节,在原有矿井提升设备电控系统设计研究的基础上,提出了控制系统的设计要点及注意事项,并做了具体分析,以供参考。
1 矿井提升设备控制系统方案框图
一台简单的矿井提升设备具有三大部分:结构部分(包括机架、支腿、底座等)、机构部分(减速机、制动器、卷筒、钢丝绳、吊具装置等)、电气部分(电机、电控系统、操作监视装置、安全保护装置、电缆等)。
在控制系统方案设计时,首先需要熟悉该类提升设备各部件的原理,以及整机所要求达到的性能和控制要求,包括保护装置的设置。图1 所示为矿井提升设备电气控制系统框图,根据框图对各部分进行分解并进行深化设计,最终以形成一套完整的电气控制系统。

图1 电气控制系统方案Fig.1 Electrical control system scheme diagram
2 电气控制系统设计要点
电控系统的主要任务是针对机构的配置实现机构的安全可靠运行,使设备能够达到整机设计的各项性能指标和安全指标。在设计的过程中,必须对设备的整机性能深入了解,方能进行电控系统的设计,在设计过程中会存在诸多问题,下面着重介绍电控系统的设计要点。
2.1 超频与超速开关控制点数的匹配
矿井提升设备一般采用变频调速控制,由于矿井深度一般较深,浅的有几十米,深则上百米,对提升设备的工作效率要求很高,在空钩或者轻载时要求高速,重载时要求低速,为了达到这一目的,控制系统设计时主要是采用变频器超频控制的方式,所以在电机超速开关配置的配置时,就需要根据基频和最大频率的两个电机转速值来配备超速开关,即超速开关具有两个速度的超速控制,做到基频超速开关和超频超速开关均能起作用,控制制动器闭合,停止机构运行,从而有效避免因电机超速出现事故。
有些情况会用到3~4 倍变频电机,比如SIEMENS公司的IPH8 系列电机,可以将基频做到15~20 Hz,如果实际应用到3~4倍超频,其电机的超速开关点数也应根据实际需要,配备相应输出点数的超速开关。
2.2 双重提升防溜钩设计
起升设备的溜钩问题是影响起升性能的重要因素,一旦出现溜钩,会引起严重的安全事故[7-8]。为避免出现溜钩现象,传统的设计方式是采用带编码器反馈的闭环矢量变频控制方式,在电机上配备增量型编码器,运行过程中,变频器通过编码器实时检测电机的实际运行速度,当电机的速度与变频器预设的速度存在较大偏差时(一般变频器速度偏差参数值设置为10%),变频器发出报警及故障信号,控制制动器闭合,停止机构的运行。
为了更为有效地避免溜钩现象。除了采用闭环矢量变频控制方式之外,在系统中再增加一套防止溜钩的安全保护装置,即在提升机构的钢丝绳卷筒末端安装一套卷筒方向脉冲检测装置。
图2所示为防溜钩保护系统工作流程。当提升机处于向上提升状态时,变频器给定的速度通过电机尾部安装的增量型编码器进行检测,当变频器通过增量编码器反馈的速度与变频器实际给定速度值有偏差时,变频器发出故障报警信号,停止提升作业,待检查故障并排除后,控制系统继续进行提升作业。与此同时,通过正负脉冲检测编码器检测出来的卷筒方向信号传送至主控制器模块,经过分析运算,再与卷筒实际方向进行比较,若检测到的卷筒方向和实际操作方向不一致时,系统判断当前状态为溜钩状态,立即发出控制信号,控制制动器闭合,停止上升动作,并对溜钩现象进行分析并排除故障,故障排除后,重新送电。若检测编码器检测的卷筒方向与上升方向一致,则提升机上升操作正常运行,直至此次操作结束,完成整个上升动作操作。
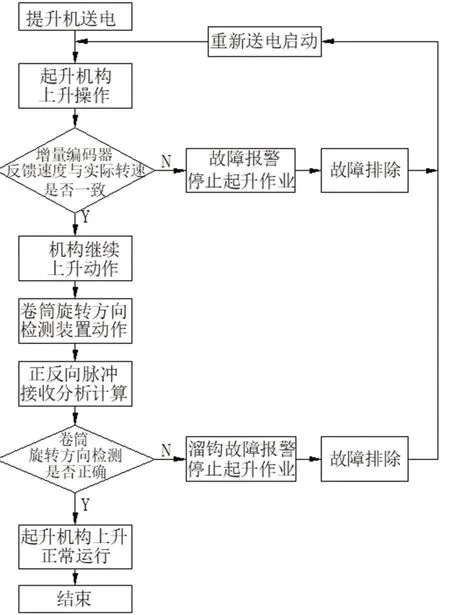
图2 防溜钩保护装置控制流程Fig.2 Control flow chart of anti-slip hook protection device
通过加装以上双重防溜钩保护装置,可以有效地避免箕斗及吊物溜钩现象的发生,保障了提升设备起升机提升工作的安全。
2.3 新型高度保护装置
起升限位保护装置的常规设计是在钢丝绳卷筒尾部安装机械凸轮式限位器,进行上限位和下限位的保护。由于矿井深度根据采矿的进度不断发生变化,不可能每天实时地人为去调整下限位装置的凸轮,基于这个问题,上升限位装置可以采用常规的卷筒尾部加装DXZ 型旋转式机械凸轮限位来实现,在下降限位保护装置的设计选用时,就不能采用常规的凸轮机械限位的方式,可以考虑采用新型的无线超声波测距仪,将无线超声波检测装置安装在箕斗的适当位置,图3 所示为箕斗下限位装置安装图,通过无线发射当前吊钩距离地下极限位置的距离,安装在控制柜上的无线接收装置,接收信号后,传送到控制柜内的PLC 可编程控制器,通过PLC 的运算处理,并发出控制信号,控制箕斗的下限极限高度,从而有效的解决了凸轮机械限位无法实现下限位设置的难题。

图3 箕斗下限位装置安装Fig.3 Installation drawing of downlimit device of the skip
无线发射测距装置有多种形式,还无线传输的红外测距装置、无线传输的激光测距装置等,可以根据实际情况选用适合的装置,从而达到较好的保护控制效果。
2.4 PLC和变频器双冗余(热备)设计
有些特殊场合使用的矿用起升设备,其使用频率非常高,加上采矿进度相当快,有些情况不允许提升设备停下来,但PLC 和变频器等电器设备在长时间以及恶劣环境的使用过程中,难免会出现故障导致设备停止运转,这就会影响采矿作业流程的连续性[9-10]。为了解决这一问题,在此类场合的矿井提升设备电气控制系统设计时,需要考虑PLC 和变频器的硬件冗余,必须采用热冗余的形式,尤其是在变频器热冗余设计时,需要注意正常变频器和冗余变频器输出端接触器的切换,以及对应变频器编码器卡输出到增量型编码器之间继电器的切换。
当正常使用的PLC 或变频器出现故障时,操作人员可以直接通过操作面板上的冗余切换旋钮开关,将相应的PLC或变频器切换为备用PLC或备用变频器,使提升机控制系统不间断的运行,从而保证了设备运行的安全性。
3 控制系统设计时的其他注意事项
3.1 电器设备的IP防护等级
矿用起升设备一般使用在多粉尘、潮湿等恶劣环境,而且机构的工作级别较高,在控制系统设计时,需要考虑提高电动机、控制柜体、制动电阻、安全保护装置等电器设备的IP 防护等级,还需要注意在控制柜内增加温湿度传感器和加热/除湿装置,确保控制电器元件的正常使用环境,以延长电器设备的使用寿命。
3.2 制动系统的监测
提升设备制动装置在设计选型时,除了保证机构制动要求的制动力矩性能外,还需要在支持制动器的制动器闸瓦上或者安全制动器的制动盘摩擦片相应位置安装磨损检测传感器,将反馈信号通过PLC模块反馈至操作人员监控界面,在闸瓦磨损到一定程度时,发出报警及故障信号,提醒操作人员及维护人员及时更换,避免安全事故发生[11-13]。
3.3 人机交互界面及安全监控管理系统
随着触摸屏逐步运用到特种设备监控领域,有些特别重要的场合,设计时也要考虑增加人机交互界面及安全监控管理系统,监控及记录提升过程与安全保护装置的状态[14],提升过程中电动机转速、电流及电压参数监控与记录,限位保护装置、超速开关、重量限制器等状态的监控,并记录存储设备的所有历史故障信息,从而使相关人员处于被监督的工作状态,可以督促操作和指挥人员提高安全意识、减少或杜绝安全事故隐患,从而有效地减少违规现象,降低恶性事故的发生概率。
4 结束语
矿井提升设备的电气控制系统设计时一定要综合全面考虑,不但要实现提升设备的各项控制性能指标,而且要考虑控制系统具备完善的安全保护装置,比如在有些矿井设备的电气控制系统设计时,还需要考虑能量回馈系统、卷筒钢丝绳防止断绳保护系统、机构及结构件的寿命监测预警系统等。所以要求矿用提升设备电控设计人员在实际设计过程中,要根据具体实际情况、安全要求等几个方面综合考虑,制定合适、完善的控制方案,以确保矿井提升设备安全、高效、可靠运行。
