基于语音识别的智能垃圾桶设计与实现*
2022-02-24贺连升周扬理于新畅牛子夫赵一林
贺连升,周扬理,于新畅,牛子夫,赵一林
(山东石油化工学院机械与控制工程学院,山东东营 257000)
0 引言
现在许多国家从事研究智能垃圾桶,从国内外研究的状况看,缺乏一种集自动套袋/装袋、自动打包、定点投送功能于一体的智能垃圾桶。市面上的垃圾桶分为两类:一是机械式垃圾桶,此类垃圾桶采用机械式结构,通过脚踩下方踏板实现垃圾桶盖的升起[1],不能实现垃圾袋的套袋、打包,需要人工的辅助;二是智能垃圾桶[2-4],这类垃圾桶带有传感器,传感器接收信号,处理器控制机械装置进行必要动作[5],移动时,无法精准定位[6-7]。机械与控制相结合,传感器检测,部分具有自动打包功能,需要人工辅助。目前智能垃圾桶自动套袋功能所用结构都较为复杂,占据较大空间,因其体积限制不能实现全部功能。打包机构无法准确判断垃圾是否填满,加热丝外漏,无准确控制、保护此装置设备,易造成危险[8]。目前出现在市面上的智能垃圾桶价格十分昂贵,普通家庭难以承受。
目前所研制的垃圾桶为一种新型智能垃圾桶[4],这类垃圾桶目前可以完成定时打包并推出的功能,仅限于用户实时控制其行走,因缺少定位系统无法做到垃圾袋的定点投送,打包不能根据垃圾桶实际情况进行,限于规定时间内进行,功能有限。而白桂峰[8]基于STC89C52的家用智能垃圾桶设计,可以解决自动开关盖,对桶内垃圾进行高度检测、异味检测,但高度检测无法解决密度较大物体重量较大而高度不够的情况,容易造成垃圾过重的情况。不具备打包等功能。
目前智能垃圾桶比较成熟的设计是智能开盖自动换袋垃圾桶,具备自动开盖、自动套袋等功能,自动套袋设计采用上座装袋盒,扔一个换一个的方式。需要人工进行打包,增加垃圾直接接触的概率,垃圾桶不能自由移动。基于物联网控制的智能垃圾桶[9]也已经出现,通过传感器等设备与物联网进行通信,通过超声波检测进行自动的开关盖。基于WiFi 的新型智能垃圾桶设计[10]通过WiFi进行定位与控制通信。新型智能垃圾桶的设计基于语音识别来控制垃圾桶的功能[11]。目前已经上市的一款智能垃圾桶是小米智能垃圾桶[12],具备自动打包、自动换袋功能。但其打包只能通过人工观测确定,使用特制垃圾袋,价格昂贵[13]。垃圾打包后,需要人工将垃圾送至投送点,固定位置,不能移动,体积大但投入口较小,易造成垃圾散落,无语音控制系统,使用较为不便。
1 设计要求
智能垃圾桶的设计要求如表1所示。
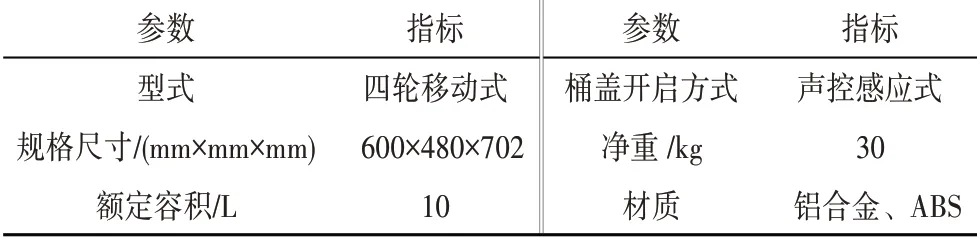
表1 设计要求Tab.1 Design requirement
2 结构设计
智能垃圾桶主要分为垃圾袋提升装置、装袋和打包装置、行走装置。如图1 所示。提升装置包括后侧滚筒、提升装置。装袋和打包装置主要有装袋装置、打包装置组成,两个装置组合在一起,互相配合完成功能。行走装置采用麦克纳姆轮,当其行走时可以任意角度行走。
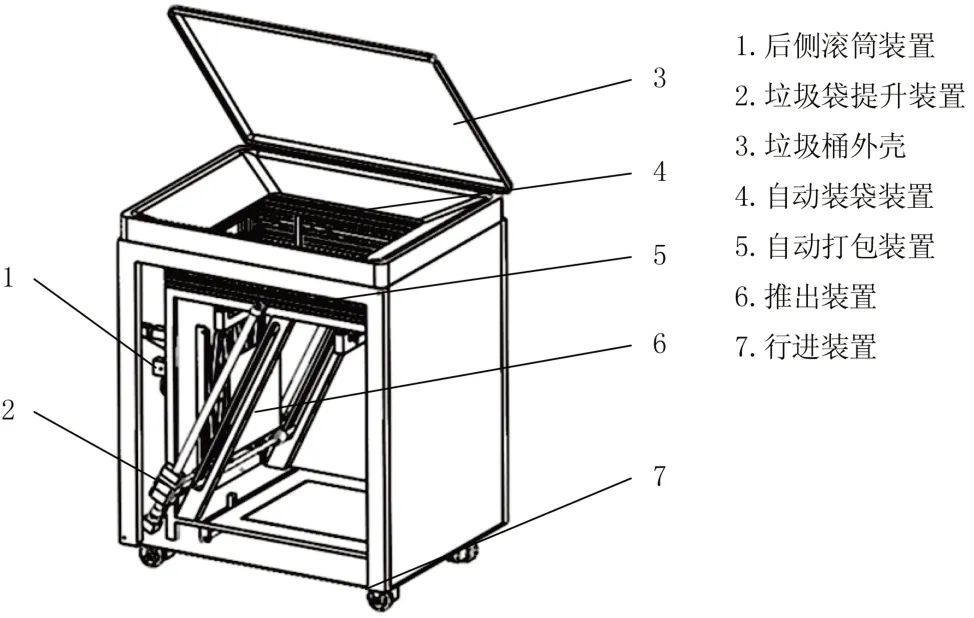
图1 整体结构
3 工作原理
3.1 自动提袋装置
自动装袋装置分为提袋装置和开袋装置,提袋装置主要由丝杠、升降滑块、转轴、光轴、电机等组成,结构如图2~3所示。开袋装置主要由固定杆、支撑杆、电磁开关、吸碗等组成,如图4所示。
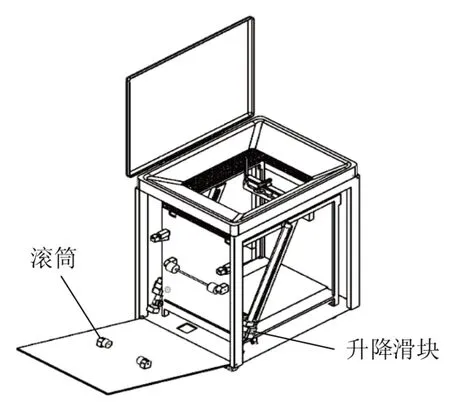
图2 后盖打开示意图
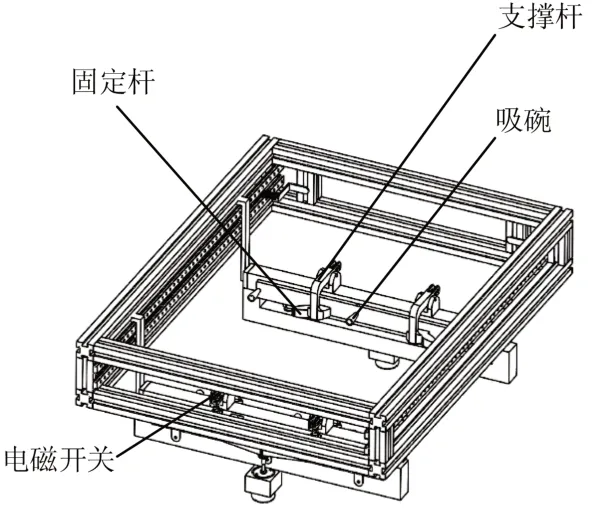
图4 固定与打包装置
其中升降滑块连接丝杆组成丝杆升降装置,丝杆下方连接有小型电机提供动力,两侧放置。两侧升降滑块连接转轴,当小型电机转动时,升降滑块会上下移动。转轴上安装有夹紧装置,可以夹紧垃圾袋。垃圾桶横向可以装载600 mm以内垃圾袋,可以自由进行调整,可以使用市面上大部分的普通垃圾袋。
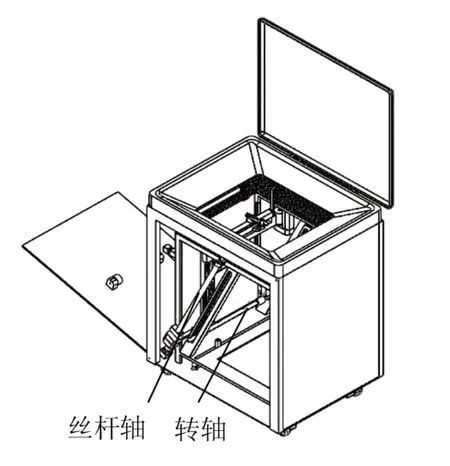
图3 内部示意图
吸碗、固定杆与支撑杆连接在横杆上,横杆连接左右小型导轨,通过皮带传动实现吸碗前后移动。吸碗后方通过导管连接小型真空泵,垃圾袋提升至吸碗时,小型真空泵启动,将垃圾袋吸住,导轨移动把垃圾袋打开,固定杆和支撑杆将之固定。
垃圾袋在垃圾桶内壁后侧滚筒带动垃圾袋滚动下滑,由内壁两根转轴夹紧固定好后,升降滑块带动转轴结构及垃圾袋整体上升,同时垃圾桶上部的封袋装置向中间移动,当转轴带动垃圾袋到达顶部后,由同时到达中间的吸碗吸住垃圾袋,电磁开关通电,固定杆升起。转轴经由导轨复位并重复夹紧下一个垃圾袋。吸碗则带动垃圾袋在皮带导轨配合运动下向两边运动并进行撑开动作,当带动吸碗的撑杆向两端运动的过程中,垃圾袋撑开,电磁开关断电,固定杆下降,固定杆与支撑杆加紧垃圾袋实现固定。且在垃圾袋被固定时,垃圾桶底部的电机带动丝杠横向运动,便于割刀进行垃圾袋间的割断。功能开始需要人工将袋子引入滚筒上,当一次动作完成后则不需要人工进行辅助动作,可以完成全部动作。
3.2 自动打包装置
热封打包主要依靠一对热封部件,依据塑料袋特性将垃圾袋袋口热封。
自动打包装置主要有封口装置和推出机构等组成。封口装置依靠封袋装置上导轨的移动实现,在横杆下方加入皮带,皮带上带有封刀,皮带在电机的作用下可以左右移动,两侧放置。如图5所示。
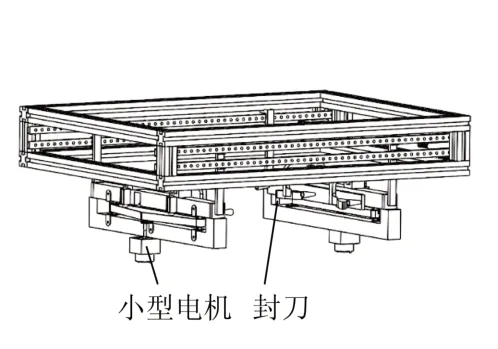
图5 固定与打包装置
推出机构主要由剪叉式伸缩装置、丝杠、活动地板等组成丝杠转动带动剪叉式伸缩装置伸出,把垃圾袋推出底板到达限位后回急速弹回。如图6所示。

图6 推出装置
在垃圾桶底部设置重力感应装置,在垃圾桶侧壁设置高度感应装置,当垃圾满足高度和重力任意一个标准时,系统通过判断进行打包功能。
通过皮带传动进行热封打包,电机提供动能,皮带带动两个热封刀向中间移动。热封刀由耐热塑料包裹,头部为导热铝片,当感应装置检测到垃圾桶内的垃圾满足所设定标准时,封刀加热,同时电机驱动皮带带动两个封刀向中间移动,热封垃圾袋袋口。封刀两侧设置可减少封刀运行时间,热熔加热时间短,安全可靠。
垃圾袋推出装置工作时,丝杠传动和剪叉式伸缩装置配合,后侧装有弹簧的活动底板作为辅助,将装满垃圾的垃圾袋向外推。在垃圾推出的过程中因与活动底板之间存在摩擦力,当达到最大摩擦力时,弹簧不再伸长,此时弹簧带动活动底板复位,垃圾袋被送出,垃圾桶前门顶部使用转动销钉固定,底部使用磁铁将其吸附关闭。待垃圾袋推出的过程中慢慢将前门推开,待垃圾袋完全推出后,丝杠传动带动推出机构复位,垃圾桶前门因受重力和磁铁吸力同时作用将其关闭。此时,垃圾桶按指定点原路返回。
3.3 行进装置
行进装置主要由4 个独立安装的电机和麦克纳姆轮组成,麦克纳姆轮分为左右两种,两左两右一共4 个组成一组,麦一组克纳姆轮可以实现前行、横移、斜行、旋转及其组合等运动方式。根据使用者的习惯,可以使用语音控制与实时控制两种方式进行,可以在狭小的空间内自由移动。
在自动状态下,当垃圾袋被热熔打包好后,垃圾桶执行程序命令,底部的驱动装置开始运行,使用循迹定位,使底轮带动垃圾桶到达预设地点。
4 控制程序设计
智能家用垃圾桶运动主要是控制每个装置驱动电机正反转,实现装袋与打包功能。控制功能流程如图7所示。
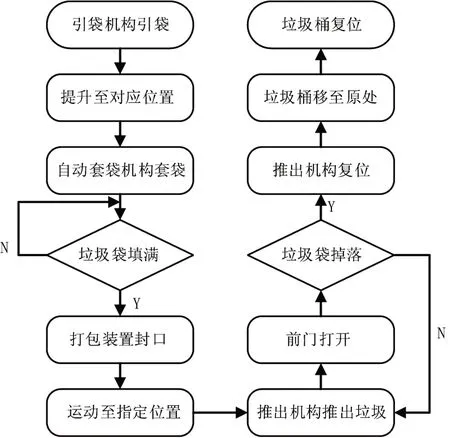
图7 控制程序
4.1 系统硬件
智能垃圾桶采用STM32 单片机F103C8T6 作为主控芯片进行控制,其单片机是一种32位的单片机,该单片机性能好,功耗低,可以同时控制多个输出。电机采用42 步进电机,该电机控制精确,扭矩大,满足精确控制和实现基本功能的要求。
语音识别模块采用LD3320语音识别模块。该芯片有非特定人语音识别技术的优势,不需要进行录音,识别过程中每次识别的过程,就是把用户说出的语音内容,转换为语音特征,和关键词语列表中的条目进行匹配,最优匹配的一条作为识别结果。该芯片集成了语音识别处理器外部电路,不需要其他辅助芯片。集成在产品中实现语音识别对话功能。可以自由储存多条不超过10个汉字的语音识别命令,可以自由添加,修改识别命令。LD3320芯片进行识别时,说出关键词,芯片会送出一个中断提示,一次识别流程结束,此时中断处理函数会被调用并去寄存器中读取识别结果。识别完成后向STM32单片机发送一条指令,单片机接受指令后控制电机运行,完成必要的功能。
WiFi 模块采用ESP8266 芯片,利用此芯片与互联网相连基于此,此设备可以和多个互联网终端进行控制。至此此智能垃圾桶可以采用两种方式进行语音识别,其中使用互联网终端后,语音识别方式依靠终端识别进行,终端识别后发送命令给单片机。例如可以利用小爱同学进行控制,使用小爱同学终端设备进行语音识别,语音识别精度更高。
行进装置采用Ardurno 单片机控制L298N 电机驱动模块,与主控STM32 单片机进行串口通信完成信息交换。单片机独立控制4 个电机的前进和后退,通过麦克纳姆轮不同的转向安装方式控制行走。
4.2 关键程序
语音识别中,中文只能由拼音代替。本设备设置了两种功能,可以通过本身的LD3320语音控制芯片进行控制设备运行,也可通过ESP8266 芯片接入互联网,利用互联网终端进行控制。其控制程序分为3 个部分,语音识别、检测部分与控制部分。如图8~9所示。
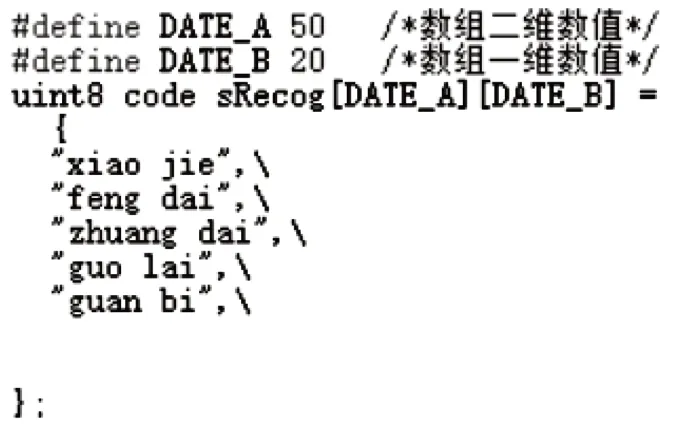
图8 语音识别程序
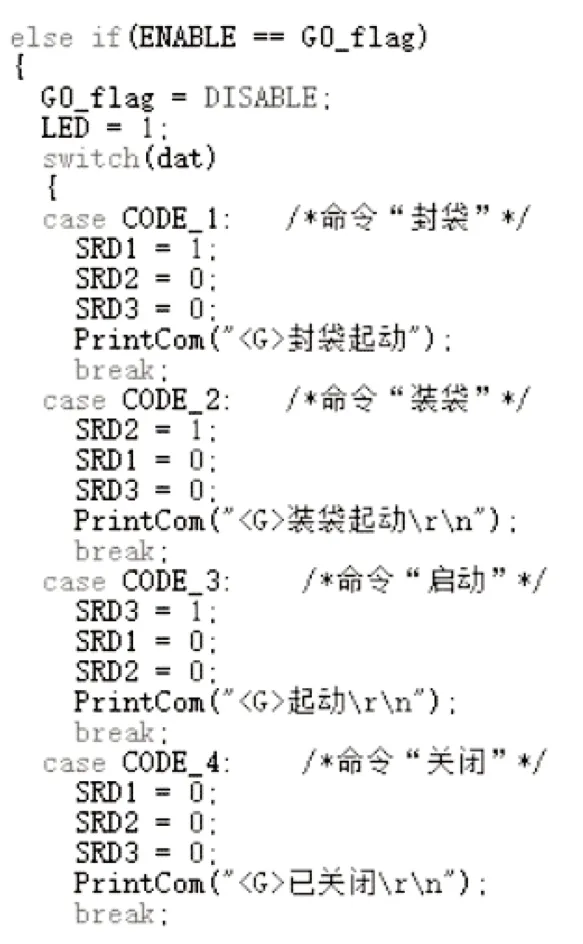
图9 功能控制程序
5 垃圾桶实物制作
智能垃圾桶采用欧标20×20 铝管制作,小型真空泵实现开袋,以解决上述功能,垃圾桶实物如图10~11 所示,可实现全部功能。

图10 垃圾桶侧视

图11 垃圾桶正视
本机共用6 个42 步进电机来协调各个装置之间的运动关系。左右使用两个T8 丝杠与滑块。使用MGN7R 微型线轨实现滑动。下方使用4 个JGB37-520 直流减速电机独立控制4 个麦克纳姆轮,电源使用铅酸电池进行供电。
6 结束语
针对现垃圾桶需要耗费大量人力,接触垃圾等问题,本文设计的垃圾桶是一款基于语音识别的智能垃圾桶。通过LD3320芯片语音识别功能,解决动作控制等问题,采用STM32 芯片进行控制动作关系。集自动开盖、装袋、打包、封口、将垃圾输送到指定地点的功能于一体。通过传感器确定位置,自动循迹,采用全方位移动的麦克纳姆轮,可在家庭的狭小空间内进行移动,不需要人工走动即可将垃圾送入垃圾桶,并在垃圾填满后自动送至垃圾投送点。基于语音识别的智能垃圾桶具有结构简单、设计合理、结实耐用、操作方便等优点。适用于家庭,可以减少人力时间、节省人工、减少细菌传播、自动倾倒,实现现代家居设备的“智能化”。
