基于数字图像处理的铁路客车上水防护方法研究
2022-02-24张亮,张念,2
张 亮,张 念,2
(1.太原科技大学 交通与物流学院,太原 030024;2.太原理工大学 土木工程学院,太原 030024)
随着我国铁路客运事业的高速发展,客运量不断增大,为保证旅客车内用水需求,铁路客车上水作业尤为重要。然而,上水工作除了时间紧、任务重之外,上水工还要时刻注意有没有列车开进站台,当列车开进站台时会产生较大的吸力,稍有不慎,则会出现重大安全事故[1]。尽管智能化上水装置已在部分车站投入使用,但为避免突发事件发生,仍会安排一定数量的上水安全员保证生产作业正常运行[2]。
为保证列车上水作业的安全进行,作者通过对北京西站、太原站、临汾站及杭州东站上水作业的实地调研,针对目前铁路上水防护工作仍依赖人工提醒的现状,提出了一种自动化水平较高的防护方法,即采用车站连锁系统获取排路信息,通过监控视频进行目标识别验证来车股道,如来车股道旁股道正进行上水作业,则对上水工做防护提醒,反之则不用。
1 现状分析
目前的上水作业流程如下:
(1)铁路总公司发布上水计划,并将该计划下发至各个路局、站段。
(2)列车长观察车厢用水情况,如有需要,则向途径车站发送上水需求。
(3)车站指挥中心收到上水需求后,提前15 min通知上水工队进入沟道,严格按照上水计划为途径本站的列车上水。若旁股道来车,指挥中心会通过对讲机提醒上水工注意防护。
(4)待上水完成后,上水工有序离开站台[3]。
由于目前上水防护仍依赖客运指挥人员通过对讲机人工提醒,当遇到大面积晚点,列车更改进站股道时,客运指挥部门往往需要加派人手进行防护[4]。从经济性与安全性角度考虑,上水防护作业的自动化水平有待提高。
2 解决方法
针对目前铁路上水防护问题,作者通过实地调研分析,提出将车站联锁系统与图像处理相结合的方法,检测是否需要对上水作业人员提醒防护。流程图如图1所示。
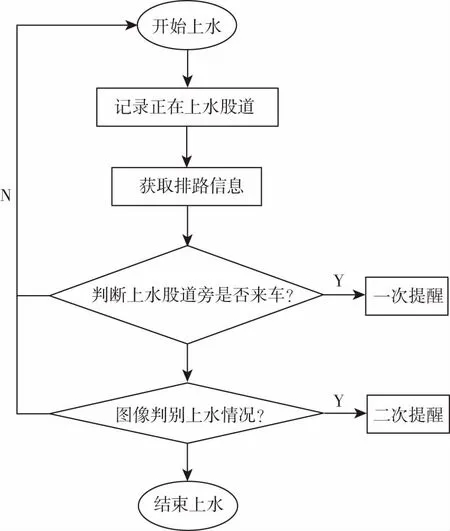
图1 方案流程图
2.1 车站联锁预警
具备上水条件的车站大都采用计算机联锁,其利用计算机对车站作业人员的操作命令及现场表示的信息进行逻辑运算,从而实现对信号机及道岔等进行集中控制,使其达到相互制约。计算机联锁系统由硬件设备和软件设备构成。软件设备是实现进路、信号机和道岔相互制约的核心部分,由两部分组成:一是参与联锁运算的车站数据库;二是进行联锁逻辑运算,完成联锁功能的应用程序[5]。现上水防护仍由客运指挥人员观察正在上水股道旁侧股道是否来车,进而通知上水工采取防护。针对此问题,可对联锁软件进行二次开发。
如图2所示,假设2车正在进行上水作业,当检测到3车将要进站(股道白色灯带亮起),则通过安装在上水栓附近的信号发生器自动对上水人员进行防护提醒。通常列车进站前10 min会获取排路信息,若此时提醒上水人员进行防护,则会造成上水作业时间延长,降低上水效率。因此,仍需较为科学地设置提醒时间,避免因过早提醒防护带来的上水延误。
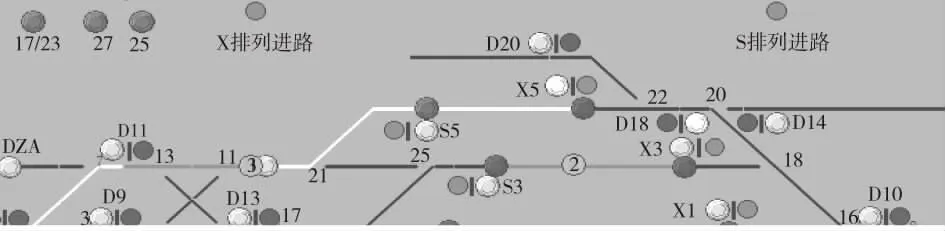
图2 车站联锁仿真图
2.2 图像目标识别预警
近年来,图像处理技术不断发展,经历了文字识别到数字图像处理与识别,再到物体识别,目标识别应用范围广,可靠性强。作者提出将目标识别技术应用于上水防护工作中,配置了python3.6+opencv4.0的实验环境,通过对比sobelX,sobelY,canny三种典型的边缘检测算子,提出最大类间方差法自动取阈值的方法对canny算子进行优化[6],可以实现不同光照条件下对轨道线路的提取,设置了安全距离,以达到上水作业检测并防护的目的。
首先读入需要检测图片,原始图像进行灰度处理,图形灰度化可以去除无用的颜色信息,有效减少后期的计算量,图像灰度处理结果及灰度直方图如图3、图4所示。

图3 灰度图
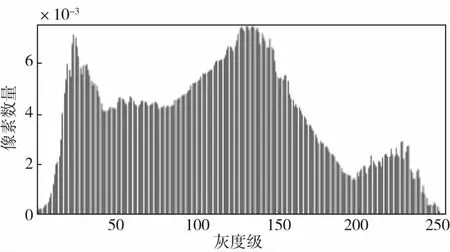
图4 灰度直方图
对铁轨的提取采用边缘检测算子来实现,本文在研宄过程中选取了sobelX,sobelY,canny三种典型的边缘检测算子进行试验。每帧图像的灰度有差异,通常边界处会有较为明显的边缘,实现分割图像则可以利用此特征。工程中进行图像分割,一般只用到一阶和二阶导数。原理上可以用更高阶的导数,但是,噪声对导数影响较大,二阶以上导数尤为明显,因此三阶及以上导数工程意义并不明显。由于二阶导数对噪声也较敏感,处理方法是先对图像进行平滑处理以滤除部分噪声,再对边缘进行检测。
Sobel算子含3×3的的横向模板矩阵及纵向模板矩阵,将其与图像作平面卷积,横向及纵向的亮度差分近似值便可获取[7]。工程应用中,针对不同的亮度,可选择不同模板提取亮度差分近似值,通常用如下模板来检测图像边缘。
检测水平边沿横向模板:
检测垂直平边沿纵向模板:
定义G为图像像素梯度近似值范数,图像的每一个像素的横向及纵向近似值来表示范数,计算出梯度的大小,如式(1)所示。
(1)
可用式(2)计算梯度方向。
(2)
Sobel算子没有将图像所采集的要素与背景严格区分,适用于要素与背景差异较大的情况,而铁轨提取的主要干扰在于轨枕及碎石,且要素与背景差异并不明显。由于Sobel算子没有基于图像灰度进行处理,故未能严格模拟人的视觉生理特征,所以用于提取轨道线路不能达到理想效果。效果图如图5、图6所示。

图5 水平方向边缘检测

图6 垂直方向边缘检测
Canny算子是一个具有滤波、增强、检测的多阶段优化算子。求边缘点具体算法如下:首先用高斯滤波器平滑图像;再用一阶偏导有限差分计算梯度幅值和方向;然后,对梯度幅值进行非极大值抑制;最后,用双阈值算法检测和连接边缘[8]。
传统Canny算法需要人工设置阈值,在视频检测工作中,诸如天气、光照等因素实时发生变化,设置固定阈值显然是不可行的,针对此问题,作者提出利用最大类间方差方法(大津法)自动选取阈值,并将阈值参数传送至canny函数的阈值形参中,即可实现针对不同条件下的边缘提取。
最大类间方差法的基本思想是:将非极大值抑制后的图像中像素分为C1,C2,C3类,即非边缘,伪边缘,真实边缘三类,每类中包含的梯度幅值分别为{t1,t2,…,tk},{tk+1,tk+2,…,tm},{tm+1,tm+2,…,tL},求得类间方差最大时的tk,tm,即高阈值Tmax与低阈值Tmin[9].
在求梯度前,首先要先高斯平滑滤波,因为噪声对求导的干扰很大,必须先做出平滑曲线[10],如图7所示。非极大值抑制后,利用类间方差最大法求得高低阈值,结果如图8所示。凡边缘像素点梯度值大于高阈值,则被认为是强边缘点,应保留;边缘梯度值介于高阈值与低阈值之间,则标记为弱边缘点,从该像素的8邻域的寻找像素梯度值,如果存在像素梯度值高于高阈值,则保留,如果没有,则舍弃;小于低阈值的点则被抑制。最大类间方差法取阈值后的canny算子处理效果如图9所示。
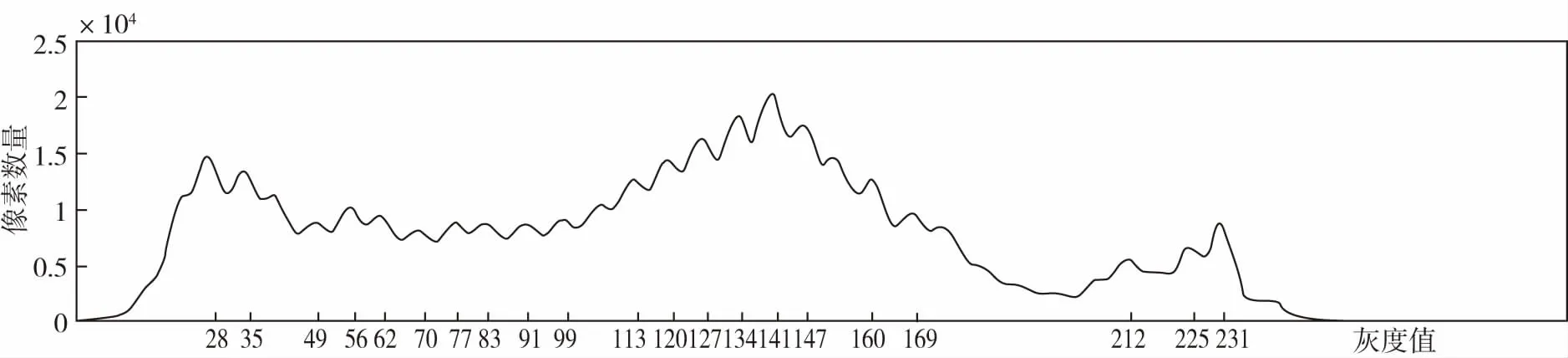
图7 高斯平滑直方图

图8 自适应双阈值结果图

图9 大津法取阈值后的canny算子处理效果图
将边缘检测后图像转换成HLS通道,LUV通道,LAB通道,然后判断图像像素值信息及三个通道信息,再选取ROI区域,将选取的ROI区域转换成鸟瞰图,从鸟瞰图里去进行边缘侧检测[11]。在实际工程中,铁路弯轨往往占比较大,而概率霍夫算法检测仅适用于拟合直线轨道,无法很好拟合弯轨线路,故采用三次函数拟合轨道线路,并设置安全距离。
经实验,在天气状况良好且光照充足的条件下,检测轨道长度可达75 m,设置轨道两侧安全距离为1.5 m,如图10所示,当图中标注绿色股道来车时,通过结合深度学习网络模型可实时检测安全距离内有无人员,即可判断上水作业是否进行,并选择提醒。

图10 识别效果图
3 实现目标
上水作业的防护方法目前主要依靠人工提醒,对人力成本造成了极大浪费,通过对车站计算机联锁系统二次开发和图像目标识别技术的应用,可提升上水防护的自动化水平,减轻客运指挥人员的工作量。
4 结束语
上水工作苦、脏、累、险,上水作业的智能化势在必行,前人通过设计自动上水装置减轻了上水工的劳动强度,但并未加强对上水工人的安全防护。本文提出了将车站联锁系统与图像目标识别相结合,判定上水股道旁侧股道来车情况,通过图像处理实验,验证了方案的可行性。下一步应降低算法的时间复杂度,并结合深度学习对安全距离内的异物检测,既可满足上水作业检测的实时性要求,又可实现异物侵入报警功能。