快速收敛仿射投影算法在稀疏水声信道的应用
2022-02-23宁小玲童继进张林森罗亚松
宁小玲, 童继进, 张林森, 罗亚松, 程 晗
(海军工程大学兵器工程学院, 湖北 武汉 430033)
0 引 言
浅海中的声传播受到水体和上下边界的共同作用,产生时延、衰减和多个信号叠加等现象。造成这些现象的原因有浅海水声信道所具有特殊的声速剖面结构,以及海底介质的衰减特性对声传播损失造成的影响,更为重要是由声波受到海面、海底的单次或多次反复的反射而在接收点叠加所造成的多径效应[1-2]。水声通信的进展使人们能够在浅水信道中进行高速数据应用[3],但如果不特别注意信道的估计与均衡算法,则会使相干接收机过于复杂。通过利用水声信道的稀疏多径结构,可以改善信道跟踪并降低接收器的复杂度[4]。面对稀疏的水声信道,考虑到线性算法复杂度,出现了基于仿射投影算法(affine projection algorithm, APA)的稀疏算法[5-23]。文献[5]将改进比例APA(improved proportional APA, IPAPA)成功应用于浅水信道数据链。文献[6-11] 在IPAPA的基础上进行改进,提出了非均匀范数约束的稀疏水声信道估计算法。文献[12-16]提出了IPAPA,在稀疏系统自适应辨识的背景下验证算法的性能。文献[17]在最小均方(least mean square,LMS)算法和APA的基础上,提出了改进的自适应算法,并应用于自适应判决反馈均衡器得到更低的误码率。文献[18-22]在电子回声消除应用中,为提高自适应算法的收敛速度,提出了改进的APA及其快速实现方法。
本文首先在文献[5]IPAPA算法的基础上引入变步长算法,提高算法的收敛速度,并在此变步长比例APA基础上,引入判决反馈均衡器(decision feedback equalization, DFE)结构,进一步改善算法收敛后的稳态误差;然后通过对两种典型的稀疏水声信道模型采用正交相移键控(quadrature phase shift keying,QPSK)和16进制的正交幅度调制(16 quadrature amplitude modulation,16QAM)信号对算法收敛性能进行仿真,以验证算法的有效性。
1 新的比例APA
APA[24-25]重复利用过去的数据信号,以提高自适应滤波算法的收敛速度,是一种数据重用算法,数据重用算法被认为是在输入信号具有相关性情况下的提高自适应滤波算法收敛速度的方法之一。
与LMS算法不同的是,APA均衡器的输入是N×L维的输入信号向量矩阵XNL(k)。将k时刻的前L个输入信号向量写为如下的矩阵形式:
XNL(k)=[XN(k),XN(k-1),…,XN(k-L+1)]
式中:XN(k)=[x(k),x(k-1),…,x(k-N+1)]T。
APA权值迭代方程为
(1)
式中:W(k)=[w0(k),w1(k), …,wN-1(k)]T是N×1维的滤波器权值向量;N是均衡滤波器的长度;λ是归一化因子;μ为算法的步长因子;e(k)为误差向量。
APA是在归一化LMS(normalized LMS, NLMS)算法的基础上以增加计算复杂度的代价进一步提高了收敛速度,在此情况下,为适当减小计算复杂度,又不影响算法收敛速度,文献[5]提出了IPAPA,该算法通过引进一个对角矩阵G(k),使算法的权值迭代方程变为
W(k+1)=W(k)+μG(k)XNL(k)B(k)e(k)
(2)
对角矩阵G(k)的表达式为
G(k)=diag[g0(k),g1(k),…,gi(k),…,gN-1(k)]
(3)
(4)
式中:参数α为一个小的正数,避免算法的初始收敛阶段使算式的分母为零;参数β控制W(k)的稀疏度,对于稀疏水声信道,β接近 1;对于非稀疏信道,β接近-1,所以β的取值范围为-1≤β<1;ωi(k)为权向量W(k)中的第i个值。
APA通过数据的重用提高了算法的收敛速度,但是代价之一是增加了算法的失调[18,26-27]。因此,本文通过引进变步长μk来实现最终的失调和收敛速度之间的平衡。权值更新迭代方程为
W(k+1)=W(k)+μkG(k)XNL(k)B(k)e(k)
(5)
μk=ηexp(-ζ|e(k)|γ)|e(k)|γ-1
(6)
式中:γ是形状参数,算法的收敛快慢依靠参数γ的适当选择;η是步长参数,控制μk的取值范围;ζ也是步长参数,控制算法的收敛快慢。这时把新的快速收敛比例APA记为VSIPAPA算法。
在信道失真严重的情况下,非线性结构的DFE被广泛采用[24,28-29]。这种结构的均衡器对信号幅度畸变和噪声增强具有良好的补偿效果,且对信号采样相位不敏感[25]。基于此,本文在上述VSIPAPA算法的基础上,引入DFE结构,于是,我们得到VSIPAPA-DFE算法的迭代过程为
(7)
e(k)=d(k)-yi(k)+yb(k)
(8)
(9)
式中:Wi(k)为Ni维的前馈滤波器权值向量,其输入为Ni×L输入信号向量矩阵XNL(k);XNL(k)经过前馈滤波器Wi(k)滤波消除多径效应的影响;Wb(k)为Nb维的反馈滤波器权值向量,与前馈滤波器配合共同完成抗多径的任务;D(k)为Nb维的向量,表示判决器Qu恢复出的信息;参数μk和ρ分别为前馈滤波器和反馈滤波器的步长因子。
2 算法性能比较与分析
2.1 新算法的收敛性能分析
本文提出的新算法VSIPAPA算法涉及的变量较多,首先分析η、γ以及ζ的选择对算法收敛性能的影响。仿真初始条件:SNR=25 dB,QPSK调制信号,水声信道模型采用典型的稀疏多径水声信道H1(z)=1-0.5z-14+0.4z-18[30 ],各均衡器抽头个数取M=82。仿真结果如图1所示。
(1) 变化η值。分别取η1=0.12,η2=0.08,η3=0.05时,其他参数保持不变(L=4,γ=2,ζ=0.8)时,得到的均方误差收敛曲线如图1(a)所示。可以看出,当步长η逐渐增大时,算法的收敛速度逐渐增快。
(2) 变化γ值。分别取γ1=2,γ2=3,γ3=4,γ4=5,其他参数保持不变(L=4,η=0.08,ζ=0.8)时,得到的均方误差收敛曲线如图1(b)所示。可以看出,在信道1的环境下,当步长γ逐渐增大时,算法的收敛速度却逐渐减慢,随着迭代次数的增加,收敛稳定后的均方误差相当,所以,在信道1这样的稀疏多径信道环境下,取最佳值γ=2。
(3) 变化ζ值。分别取ζ1=1,ζ2=0.8,ζ3=0.5,ζ4=0.2,其他参数保持不变(L=4,η=0.08,γ=3)时,得到的均方误差收敛曲线如图1(c)所示。可以看出,当步长ζ逐渐减小时,算法的收敛速度却逐渐增快,随着迭代次数的增加,收敛稳定后的均方误差相当。但仿真发现,步长ζ较小(ζ<0.2)时,算法的收敛曲线将变得发散,所以,一般取ζ∈[0.2,1]。
2.2 APA类算法与LMS和 RLS算法的比较
在信道1仿真条件下,SNR=25 dB,分别采用QPSK和16QAM两种调制信号,对LMS算法、NLMS算法、APA算法、IPAPA算法、VS-IPAPA算法以及递归最小二乘(recursive least square, RLS)算法进行比较。均衡器抽头个数取M=82。仿真结果如图2所示。
图2显示,在信道1以及两种调制方式仿真条件下,LMS、NLMS、APA、IPAPA、VSIPAPA以及RLS算法的收敛趋势相同,都是收敛速度依次增强,且收敛后各算法的稳态误差几乎相当,分别为-12 dB和8 dB。在迭代次数为1 000次时,可以得到在QPSK和16QAM调制方式时的各算法的稳态误差分别如表1所示。从表1也可看出,在迭代1 000次时,LMS、NLMS、APA、IPAPA、VSIPAPA以及RLS算法的稳态误差依次减小,这也证实了各算法的收敛速度依次增强。
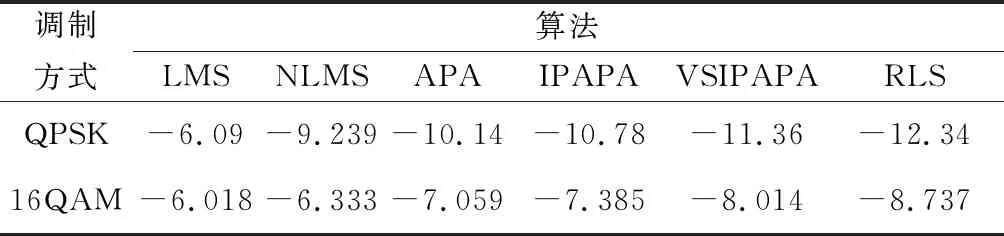
表1 迭代1 000次各算法稳态误差
NLMS算法的收敛速度通常比LMS算法更快,因为其在使瞬时输出误差最小化时,采用了可变收敛因子。APA算法在NLMS 算法的基础上通过重复利用数据增加计算复杂度的代价进一步提高收敛速度。IPAPA算法在不降低算法收敛性能的基础上,适当减小计算复杂度。VSIPAPA算法在IPAPA算法基础上通过引进变步长μk来实现最终的失调和收敛速度之间的平衡,提高了收敛速度。RLS算法即使在输入信号相关矩阵的特征值扩展比较大的情况下都能实现快速收敛。综合以上仿真结果可以看出,随着调制信号的复杂化,VSIPAPA算法的收敛性都与RLS相当,可见,VSIPAPA算法具有很好的收敛性能。
2.3 基于DFE结构的算法性能比较
在信道1和信道2两种稀疏多径水声信道仿真条件下进行DFE结构的算法仿真性能比较,信道2为H1(z)=1-0.5z-16+0.2z-27[31],且SNR=25 dB,采用QPSK信号,对LMS算法、VSIPAPA算法、 RLS算法、LMS-DFE算法、VS-IPAPA-DFE算法以及RLS-DFE算法的收敛性能进行比较。LMS算法、VSIPAPA算法、 RLS算法均衡器抽头数为M=82,DFE结构均衡器前馈滤波器权值向量Mi=33和反馈滤波器权值向量为Mb=33。仿真结果如图3所示。
从图3(a)可以看出, LMS-DFE算法、 VSIPAPA-DFE 算法和RLS-DFE算法相比LMS算法和 VSIPAPA 算法以及RLS算法增加了DFE,对信道1严重的频率选择性衰落有较好的克服能力,均衡效果要好得多,具体表现为:LMS-DFE算法 和 VSIPAPA-DFE 算法收敛后的稳态误差相同,均为约-20 dB,RLS-DFE算法收敛后的稳态误差约为-19 dB,相比非DFE结构的LMS算法和RLS算法收敛后稳态误差(约-12 dB),分别减小了8 dB和7 dB;且LMS-DFE算法、VSIPAPA-DFE 算法以及RLS-DFE算法收敛速度变化趋势也是依次增强。
从图3(b)可以看出,在信道2仿真环境下,LMS-DFE 算法和 VSIPAPA-DFE 算法以及RLS-DFE算法收敛后的稳态误差约为-20 dB,相比非DFE结构的LMS等3种算法的稳态误差(约为-17.5 dB),减小了2.5 dB;非DFE结构的LMS 3种算法收敛速度依次增强,DFE结构的LMS-DFE等3种算法收敛速度也依次增强;值得注意的是在信道2环境中,VSIPAPA算法和RLS算法的收敛速度非常接近。
所以,综合图2和图3的结果分析,可以得出结论:在稀疏多径水声环境中,VS-IPAPA算法具有和RLS 算法相当的收敛性能,是一种可替代的算法。
3 结 论
本文通过在IPAPA算法的基础上引入变步长算法,提出了VS-IPAPA算法,以改善算法的收敛速度。在此算法的基础上,引入DFE结构,得到VSIPAPA-DFE算法,进一步改善算法收敛后的稳态误差。并通过选择两种典型的稀疏水声信道和两种调制信号进行了仿真研究,新算法均表现出良好的收敛性能,新算法优于已有的LMS类算法,与RLS算法相比性能相当。且VSIPAPA-DFE算法与LMS-DFE算法和RLS-DFE算法相比,其收敛趋势与非DFE结构的各算法的收敛趋势是相同的,VS-IPAPA算法具有和RLS算法相当的收敛性能,是一种可替代的算法。