基于TDOA技术及几何模型的声源精准定位
2022-02-22王小怀伊树彬蔡洛思
王小怀 伊树彬 蔡洛思
(韩山师范学院物理与电子工程学院,广东 潮州 521000)
0 引言
声源定位是通过接收目标声源信息并利用电子装置确定目标位置的技术,即利用麦克风阵列在不同位置点对声信号进行测量,由于目标声源到达各个麦克风存在时间延迟,因此利用定位算法对测量到的声信号进行处理,并构建相关的物理模型,以获得声源点相对麦克风的位置信息(包括方位角、距离)。声源定位的研究对物理声学、工业、航空航天、智能制造以及军事都具有重要意义[1]。
为实现声源的低成本且高精度定位,该文设计并制作了一种基于到达时间差(Time Difference of Arrival,TDOA)技术及几何模型的声源定位装置。
1 设计原理
1.1 TDOA技术确定声源方位
该设计采用基于TDOA到达时间差定位原理和广义互相关函数的时延估计GCC-PHAT(Generalized Cross Correlation PHAse Transformation,GCC-PHAT)原理[2]。在原理代码化编程上采用C语言编程,试验设备上有麦克风声音接收装置、ADC模数转换等,涉及数字信号处理和相关算法的程序实现。
该装置对一个麦克风接收到的信号与另一个麦克风接收到的信号进行相关运算,从而得到TDOA的值,这种算法可以在麦克风接收信号不同步时利用互相关估计得到TDOA值,再进行定位计算就可以获得较高的精度。TDOA技术不仅定位准确,而且对算法的要求相对较低,具有很强的实际应用价值。
GCC-PHAT基于广义互相关函数的时延估计算法引入了一个加权函数对互功率谱密度进行调整,从而优化时延估计的性能。根据加权函数的不同,广义互相关函数有多种不同的变形,其中广义互相关-相位变换方法应用最广泛。研究表明,麦克风对的GCC-PHAT函数的最大值越大,则该对麦克风的接收信号越可靠,也就是接收信号质量越高[3]。
ADC转换就是将输入模拟的信号量转换成数字量。根据奎斯特采样定理,在进行模拟/数字信号的转换过程中,当采样频率Fs大于或等于信号中最高频率Fm的2倍时,采样后的数字信号才能完整保留原始信号中的信息。
在声源定位系统中,麦克风阵列的每个阵元接收到的目标信号都来自于同一个声源。因此,各通道信号之间具有较强的相关性。理想情况下,通过计算每两路信号之间的相关函数,就可以确定2个麦克风观测信号之间的时延。如图1所示,S点为声源信号,M1、M2为2个麦克风,τ为麦克风M1、M2接受信号的时延。当τ=0时,声源方位在麦克风阵列的中垂线上。

图1 双麦克风阵列模型图
虽然采用双麦克风和TDOA算法可以确定声源方位,但是无法确定声源距离,也就无法完全确定声源的准确位置。
1.2 构建几何模型确定声源距离
根据平面内2条直线相交确定1个交点的几何性质,建构的麦克风阵列中垂线相交几何模型,如图2所示。

图2 麦克风阵列中垂线相交模型图
S为声源位置,双麦克风阵列既可绕中心点A旋转,还可沿导轨整体移动,用A、A1表示其在导轨上所处的2个不同位置,距离AA1可在导轨的有效范围内灵活调节,导轨滑动方向与AA1相同。
麦克风阵列的主要作用是通过分析阵列中不同麦克风采集的信息,从而得出声音源的方向和距离[4]。如图3所示,如果双麦克风阵列在A点时测出声源S相对导轨的方位角为θ1,将双麦克风阵列移至A1点时测出声源S相对导轨的方位角为θ2,那么测出A和A1间的距离为AA1。

图3 声源位置计算模型图
根据正弦定理如公式(1)和公式(2)所示。
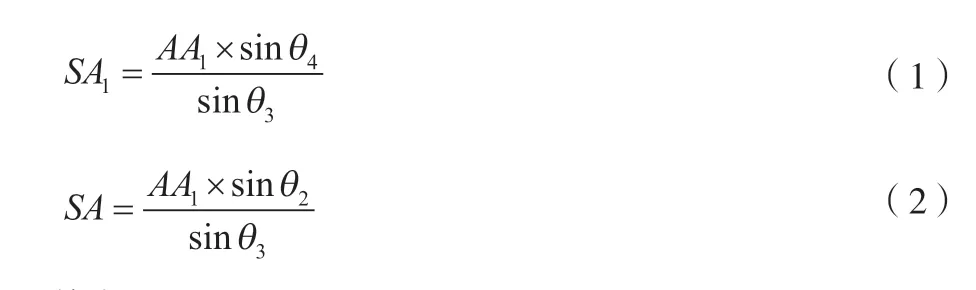
其中,θ3=θ1-θ2,θ4=180°-θ1。
将θ1、θ2以及AA1代入上式即可求出SA和SA1,从而实现了对声源S进行精确定位的目标。
2 定位装置的设计
2.1 硬件设计
该装置所使用的设计硬件主要由主控模块(STM32F407-ZGT6单片机)、双麦克风阵列、3.3 V和5 V双稳压电源模块以及3.5寸TFT LCD触摸液晶显示模块等组成。硬件设计实物如图4所示。在该装置中,考虑单片机可能存在供电不足的情况,因此通过输入6.5 V~10 V的直流电源到电源板为麦克风阵列提供3.3 V电源电压,而单片机另外由USB_TTL接口进行5 V供电。

图4 硬件装置实物图
信号采集和模数转换:2个麦克风采集到的声源模拟信号首先发送至ADC模块进行模数转换,得到数字信号。由于该试验测试用的声源信号频率范围50 kHz~10 kHz,为了满足奈奎斯特采样定理,获得质量较好的数字信号,设置采样频率为20 kHz,采样点为2 048。
数字信号处理:将基于TDOA声源定位算法和广义互相关时延函数算法用C语言实现代码化,烧录进STM32F407单片机。主控系统对ADC转换得到的离散实信号序列依次进行广义互相关函数的时延估计GCC-PHAT算法和TDOA定位原理算法的运算处理后得到声源方位数据。
定位信息显示:将声源与接收点的直线距离、声源与X轴夹角以及声源在X轴上的投射点与测量点的距离等声源定位信息通过LCD液晶屏幕直接显示。根据不同需求亦可使用串口通信方式将声源方位数据发送至电脑串口调试助手显示测量结果。
2.2 定位装置整体设计
声音信号采集系统由间隔为20 cm的双麦克风阵列构成,通过调节螺丝松紧度使2个麦克风处在同一水平线上。双麦克风阵列固定在一个刻度盘上,并可随转盘在水平面内作360°旋转;刻度盘和双麦克风阵列组合体安装在一段滑轨上,可在滑轨的有效滑动范围内移动;另外,还设有指针、刻度尺等方位角和距离读数辅助部件[5],声源定位装置的整体实物如图5所示。
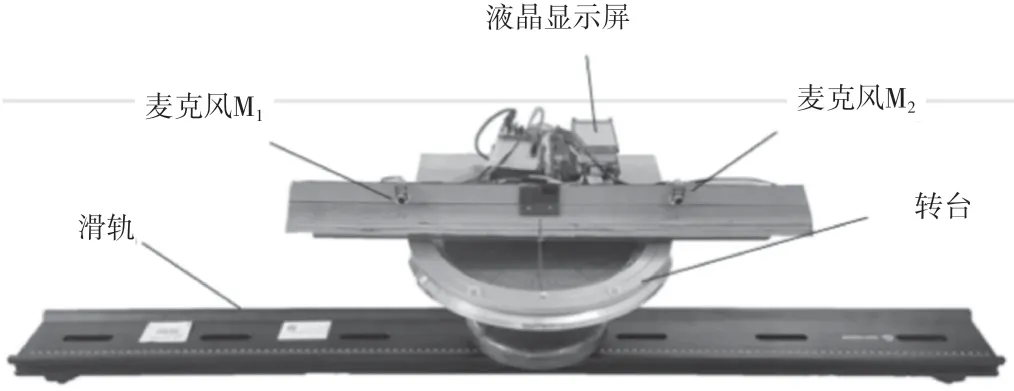
图5 定位装置实物图
3 定位操作基本步骤
定位操作基本步骤如下:1) 烧录程序。将编写好的程序编译并烧录至STM32F407ZGT6单片机。2)仪器安装。将2个麦克风输出端分别与单片机ADC各采集通道连接 PA2、PA3,并将单片机与电源板共地。3) 固定麦克风阵列。使2个麦克风都处在同一水平线,并与地面保持垂直。4) 标记测量点。选定测量点并进行标记。5) 放置声源。保持声源与麦克风阵列处在同一高度,朝麦克风阵列方向放置。6) 测量声源方位。观察LCD屏显示的方位数据,待数据稳定后记录声源位置。7) 重复测量声源方位。重新放置声源,并重复上步操作。
4 试验结果及分析
4.1 声源方位角的测量
将刻度盘和双麦克风阵列组合体(以下简称组合体)固定在滑轨左端某一位置A, 调节双麦克风阵列的初始方向(与导轨平行),此时方位指针与转盘的初始零刻度线对齐。慢慢转动组合体直至LCD屏实时显示的待测声源到达2个麦克风的时延差为0,记录此时方位指针在刻度盘上度数,即为声源方位角θ1。接着沿导轨移动组合体至位置A1,再次转动组合体至两麦克风的时延差为0,记录此时方位指针在刻度盘上度数,即为声源方位角θ2,重复以上操作共3次。改变声源位置,重复以上测量。
该试验采用双麦克风阵列去计算声源的位置,每组采用同一函数组,每组得出的结果进行相互校验,提高了试验中声源定位的准确度。
绘制各个位置对应的声源方位角θ1、θ2的测量平均值与其实际值对比图,如图6和图7所示。由图6和图7可知,测量平均值与其实际值的图线基本重合,说明声源方位角测量值与实际值吻合得很好,声源方向定位精度很高。

图6 方位角θ1的测量值与实际值对比
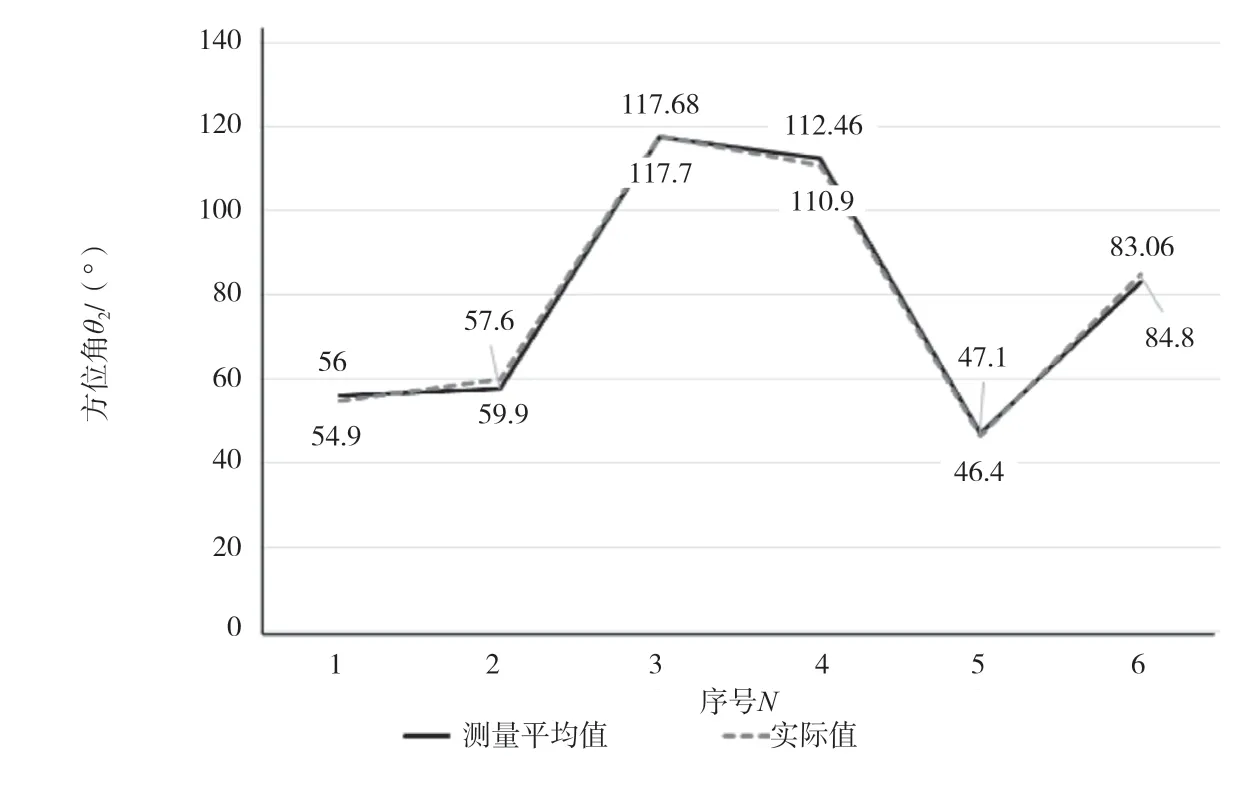
图7 方位角θ2的测量值与实际值对比
4.2 声源距离的测量
将以上θ1、θ2以及AA1的测量值代入公式(1)、公式(2)就可以得出声源与麦克风探头的距离SA和SA1,实现对声源距离进行定位的目标。距离定位结果如图8和图9所示。
由图8和图9可知,声源距离的测量值与实际值数据作出的图线高度相似,同样说明声源的距离定位也有较高的精度。

图8 SA的测量值与实际值对比图
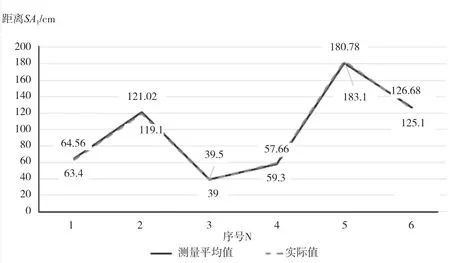
图9 SA1的测量值与实际值对比图
分别计算声源方位角、声源距离的测量相对误差,见表1。

表1 声源方位角、距离的测量相对误差(单位:%)
4.3 误差原因分析
首先是时延差量化分辨率不足。因为最小量化时延差为前端的ADC采样周期,ADC采样率为21 kHz,所以最小量化时延差约为47.6 μs,从而导致时延代入数学模型中,产生对应距离和角度的误差。
其次是声源信号的信噪比不足。该试验所采用的声源信噪比偏低。虽然在信号处理中采用基于广义互相关函数的时延估计计算GCCPHAT的方法,经过PHAT加权互功率谱(白化滤波)能较好地抑制大噪声,但是并不能完全消除噪声,从而也会对测量精度造成一定影响。
5 结语
从以上试验数据及分析结果可以看出,该文所采用的基于TDOA技术和GCC—PHAT广义互相关函数采集时延、再结合几何模型的定位方法能够准确测出声源的方位和距离。
该定位装置特有的360°全方位旋转双麦克风阵列可以在各种不同情形下灵活、快速且精准地确定声源方位。
后续可通过时延反馈信号自动控制麦克风阵列旋转跟踪并指向声源。在此基础上设计搭载该装置的智能小车,通过判断声源位置后实现自动跟踪声源并到达指定位置,可应用于餐厅的智能送餐。另外,进一步扩展麦克风阵列、优化算法以及更新信号处理方式,有望设计出更精确、更具实用化的声源定位系统以及相关的拓展应用。
