车辆起步加速驾驶性客观评价及优化
2022-02-20朱翔宇
朱翔宇
(上海汽车集团股份有限公司,上海201804)
随着国内汽车工业水平的逐年提高,车辆动态性能正逐渐成为评价一辆车好坏的关键标准。车辆动态性能从加速度方向来看,主要包括驾驶性、操控性和乘坐舒适性。其中,驾驶性特指车辆前进方向的加速度及其变化情况的评价。一辆驾驶性好的车让人感觉柔中带刚,车随心动,具备驾驭乐趣。车辆驾驶性能的开发需要结合驾驶员驾驶行为分析其具体需求,结合客观评价的指标,并针对控制策略进行适应性设计,以达到性能优化的目的。起步加速工况作为客户最常用的评价驾驶性的工况,是驾驶性开发中最重要的工况之一,一定程度上反映了车辆驾驶性的开发水平。
1 驾驶行为分析
传统的车辆性能开发主要针对车辆性能的最大能力,包括起步加速能力、超车加速能力和最高车速等。这种评价方法与日常驾驶员的驾驶行为存在巨大差异。能耗排放测试法规中已经针对实际客户使用环境进行了深度的优化,驾驶性开发也应该结合实际客户的行驶工况和驾驶行为制定对应的工况并进行适应性优化。
本文主要针对售后量产大数据统计分布以及特定驾驶风格驾驶员行驶样本的微观数据进行统计分析,获得代表实际客户行驶习惯的起步加速工况特征。
1.1 常用驾驶行为分布
根据某车型月均里程较多的700 台量产车后台数据进行统计分析,获得常用的驾驶行为分布。
1.1.1 车速加速度分布
根据量产统计样本大数据绘制的速度-加速度分布,如图1 所示。其中,车速区间位于0~120 km/h 范围内,低车速分布的比例高于高速行驶比例。车辆加速度分布在±3 m/s范围内。其中,在高速110 km/h附近有小规模的聚集分布,其余车速区间加速度范围随车速增加呈现递减趋势。
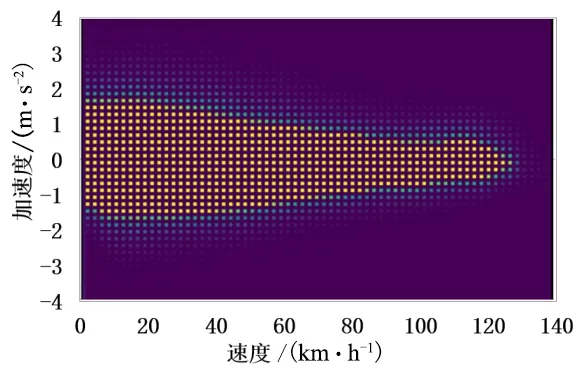
图1 量产车速度-加速度分布
1.1.2 车速油门分布
车速和油门的对应关系表征了不同车速下驾驶员的行为习惯,对驾驶性的工况建立具有具体的指导意义。如图2 所示,随油门开度增加车速范围呈现逐渐增大趋势,超过90%的工况点分布在30%油门以下,对于起步工况对应的0 km/h 车速附近区域,更是绝大部分油门开度低于20%,这与传统汽车开发中关注的全油门加速有很大差异。车辆使用行为更多的是以到达目的地为目标,极少出现全负荷状态。

图2 量产车油门开度-速度分布
1.2 起步加速特征工况提取
分析总体统计数据的同时,也需要关注不同驾驶员的驾驶细节。在针对20 位驾驶员特定路线的驾驶行为测试中发现,起步行为可以归类为两种类型。一种对应较为温柔的驾驶风格,常用油门在20%左右,驾驶车辆从0 km/h车速起步后以固定油门开度的方式加速,车辆加速度保持在1.5 m/s以下,并随车速的增加逐渐降低。另一种驾驶员体现出较为激进的驾驶风格,常用油门开度为30%~40%,随车速增加油门开度逐渐增大,驾驶预期为恒定加速度加速,加速度大小在2.5~3 m/s之间,如图3所示。

图3 驾驶员常用起步油门开度和加速度
对起步加速过程的油门变化情况进行特征分析,可以认为是介于定油门起步和定加速度起步之间的状态,对应控制模型分别为阶跃输入响应和斜坡输入响应。
1.2.1 阶跃输入响应
阶跃响应是在非常短的时间之内,一般系统的输出在输入量从0 跳变为1 时的响应表现。车辆驾驶性对应阶跃响应的操作是定油门起步加速。参照常用驾驶员操作习惯,最关心工况为20%~30%油门的定油门起步加速响应。非常短的时间定义为油门变化率超过100%/s。
1.2.2 斜坡输入响应
斜坡响应定义为一个输入量的变化斜率从0 跃增到某有限值引起的时间响应。对应实车操作工况为定加速度起步加速(峰值1~2 m/s),或近似认为以变油门起步加速,油门变化率30%~100%/s。
1.2.3 实际驾驶行为
实际的起步加速行为通常位于以上两种情况之间,呈现初段油门增加速率较快,达到加速度峰值后又逐渐下降达到稳定行驶条件的行为。通常对于驾驶员感受的评价可以通过对油门操作的频繁程度来判别,较少的油门调整可以认为系统具有较高的稳定性和准确性,从而能够更快响应驾驶员的加速度诉求,同时减少不平顺的发生。而过大的加速度设置会导致超出预期的加速度峰值,对应峰值后迅速的油门降低。如果动力迅速下降还需要进一步补充油门,就造成了起步过程的加速度振荡。
2 驾驶性评价维度定义
根据定油门起步加速过程的加速度特征分析,加速度随车速的增加呈现先快速增加再缓慢收敛的趋势。以峰值加速度点为界,可将起步加速过程分为加速度建立过程和收敛过程两个区间,如图4 所示。对应不同的区间可以分别制定不同类型的驾驶性评价指标。

图4 起步加速过程的分段
2.1 响应性指标
响应性指标主要在响应区域定义,包括初段响应和整体响应。目标可以通过油门变化后单位时间内获得的车速增加或达到固定加速度的时间来定义。对于起步加速响应和Tip-in 加速响应,都可以定义从施加油门到95%峰值加速度的时间为响应时间t_acc_95peak,定义从施加油门到0.49 m/s(0.05 g)加速度为响应延迟时间t_acc_005g。
2.2 平顺性指标
平顺性指标主要通过加速度的变化来定义,主要有3 种方式。其一是监测加速度的变化率,也就是加加速度jerk,如果这个指标大于某一数值,会获得冲击感。其二是通过加速度梯度方向的变化来观测振荡,作为不平顺的表现来定义。其三是从整体的维度,分别从响应段和收敛段,通过计算实际加速度的1 Hz低通滤波,获得理想加速度形态,再与实际加速度进行比较,其差值的累积作为不平顺的表征,命名为diff_acc,其中响应段命名为diff_acc_launch,收敛段命名为diff_acc_stable。
2.3 收敛性指标
收敛性指标通过收敛段的加速度随车速的降低程度来表征,主要分为两方面指标。其一是挡位间加速度比较,表现为高挡位加速度应该比低挡位具有更低的加速度数值。其二是在挡过程中,加速度至少要呈现不增加的趋势。整体上可以以加速度随车速变化的线性拟合值作为收敛段收敛程度的描述。在挡过程中的额加速度收敛指标定义为_acc_in_gear,各挡位间的收敛指标为_acc_between_gear。通常作为收敛性的指标要求,值应为负值。
由于大部分车型加速度呈现与车速的对数成反比的趋势,所以也可以将满足这种趋势的程度定义为收敛性指标,即加速度与车速对数的相关性,定义为r2_acc_logVehSpd。
3 竞品驾驶性表现及风格设计
对于以上所述的驾驶性指标定义,对大量竞争车型进行了测试并获得了不同指标的表现分布。以某性能表现优异的车型为例,通过与某在开发车型的比较可以看出,定义的驾驶性指标在分数的分布上确实存在显著差异。
3.1 响应性指标
以30%油门初段起步响应指标t_acc_005g 为例,在响应时间0.15~0.4 s 区间内基本上呈线性分布,可以认为对应主观评分6~8 分。极优秀的车响应时间可以达到0.1 s以下,如图5所示。
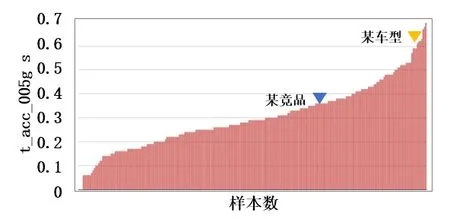
图5 初段响应指标值分布
而95%峰值响应时间则差异较大,80%比例的车型响应时间在1.5 s以下,极个别响应时间较长的车辆可以超过3 s,由图6可知,某在开发车型现状与竞品存在比较明显的差异。

图6 95%峰值响应指标值分布
3.2 平顺性指标
宏观平顺性评价指标diff_acc_launch 与diff_acc_stable在数据分布上10%~80%分位呈现比较线性的分布,与主观评估值匹配也较好,某车型与竞品的参数分布情况如图7~8 所示,也存在改进的空间。
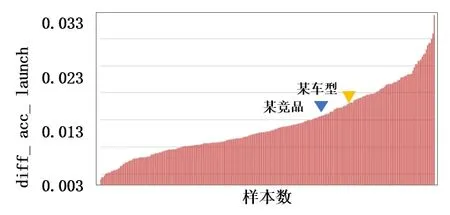
图7 起步平顺性指标值分布

图8 收敛段平顺性指标值分布
3.3 收敛性指标
以r2_acc_logVehSpd 为例,如图9 所示,数据分布差异较小,绝大部分车型可以达到负相关度95%以上,也意味着收敛性对于驾驶性开发是比较容易实现的一个维度。即便如此,1%的差异仍然能够带来可感知的驾驶性差异。针对加速度形态的优化仍然很有必要。

图9 加速度车速对数相关性指标值分布
3.4 驾驶性风格
针对驾驶性风格的评价是一个复杂而综合的过程。本文设计一种加速度梯度图像(图10),用以表征不同车辆的加速度风格。数据来源于定油门加速所获取的加速度-速度数据。按同车速下相邻油门的加速度值梯度进行染色,颜色越深代表随油门增大方向加速度梯度越大。整体颜色越深代表车辆加速度增益能力越强,整体颜色越均匀代表平顺性和线性越好。此图的颜色分布比较直观地表征了车辆驾驶型风格以及动力总成类型。

图10 加速度梯度分布
4 理想驾驶性曲面设计
4.1 主要控制参数介绍
为了控制驾驶性风格的统一和可设计性,本文尝试通过若干关键参数的定义,来确定唯一的目标加速度响应曲面。针对该曲面设计的关键控制曲线如下。
4.1.1 起步峰值曲线
不同油门开度下起步的峰值加速度随油门变化的关系(图11),决定起步的线性度、起步加速风格等感受。

图11 最大起步峰值曲线
4.1.2 最大加速度曲线
通过传动系统参数和驱动系统的最大能力,能够计算出全油门状态下加速度随车速变化的曲线(图12),作为加速响应曲面的油门维度边界,控制加速度范围。

图12 最大加速度曲线
4.1.3 等速控制线
不同车速下都有唯一的油门开度与等速行驶对应,油门-速度关系线定义了加速响应曲面中加速度正负的边界。在等速控制线附近,应避免在油门调整较小的情况下出现大幅度的加速度变化,以提高匀速行驶的稳定性。等速控制线如图13所示。

图13 等速控制线
4.1.4 加速度梯度
以上3 个参数分别定义了加速过程中的车速、加速度和油门的3 个边界,加速度梯度曲线定义的是在等速行驶的基础上,增加的油门与增加的加速度之间的对应关系。为了实现加速过程的线性和曲面的平滑,应保证不同车速下的加速度梯度连续变化,在油门维度加速度的变化应呈现一个稳定的趋势,直到达到车辆的极限动力能力。在等车速上增加固定油门的加速度梯度值相对于车速的曲线叫做系统增益曲线,如图14所示。

图14 系统增益曲线
4.2 拟合曲线
4.2.1 加速度梯度曲线
贝塞尔曲线于1962 年由法国工程师皮埃尔·贝塞尔发明,它是依据4 个位置任意的点坐标来绘制一条光滑曲线,为计算机矢量图形学奠定了基础。使用这种曲线只需要很少的控制点就能够生成复杂平滑曲线,广泛用于辅助汽车车体的工业设计。
阶贝塞尔曲线公式:

其中b() 的值为
b() = C(1 -) t,其中=0,1,…,。
利用贝塞尔曲线的形态特性来实现加速响应曲面的平滑过渡。
4.2.2 起步形态曲线
在起步形态的设计中,关注的是加速度随时间的平顺性。关键控制指标为0.49 m/s(0.05 g)响应时间,95%峰值加速度响应时间,以及峰值加速度数值。其间的加速度建立过程可以使用贝塞尔曲线拟合来设计目标,如图15 所示。在DCT 变速器车型的控制策略中,可以通过离合器传扭的控制,最大程度地拟合理想加速度曲线,来获得响应和平顺性最优的加速度形态。

图15 起步形态曲线
4.2.3 加速度收敛曲线
通常在加速度峰值到来之后,相同油门开度的加速度会随车速增加而降低,最终达到一个稳定的车速匀速行驶。需要构造一个时域函数来描述这种收敛趋势。最初准备用一种指数函数来描述这种衰减趋势,但在实际车辆数据上拟合得并不完善。最终通过竞争车数据的比对,发现理想加速度收敛趋势是与车速的对数成线性反比关系。传统驾驶性较优的车型通常符合这种趋势。因此,假设r2_acc_logVehSpd =-1 作为理想情况来设计加速度曲线收敛性。
4.3 加速度响应曲面
加速响应曲面是描述加速度-油门开度-车速关系的图形,理想加速响应曲面可以基本定义车辆驾驶性风格形态。实际加速度曲线与理想加速度曲线的而差异可以认为是驾驶平顺性的一个评价维度。
4.3.1 响应曲面形态
由以上的曲线形态构建出的理想加速曲线如下:具有平滑、线性等特征,并且可以满足定义的风格及驾驶性目标。不同油门下的理想加速度曲线连成的曲面称为加速度响应曲面,如图16所示。
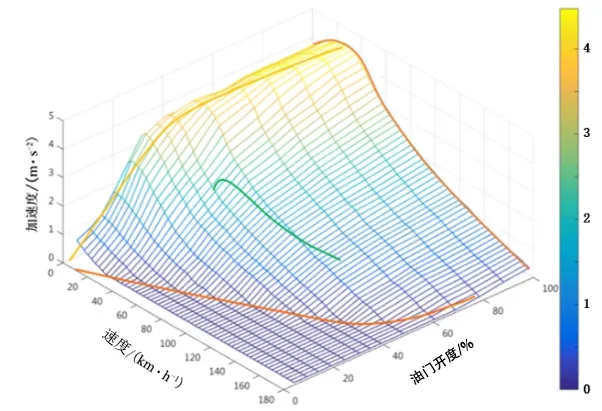
图16 加速度响应曲面
4.3.1 加速度梯度形态
在某车速下的加速度梯度设计中,仍然希望整个曲面主体维持平滑线性过渡的特征。仍然假设加速度增大趋势满足贝塞尔曲线拟合,如图17 所示,在拟合曲线上设计了6个关键控制点。其中,0%油门对应的加速度值为0 m/s,100%油门对应的加速度值应达到该车速下的最大加速能力。等速点应满足该点穿过等车速油门-速度控制线,在等速点附近,应存在等速控制点,其油门开度略大于等速点,但车速差异不大,以保证匀速行驶易控车速的性能。系统增益点的加速度值满足系统增益线定义的加速度梯度,从等速控制点到系统增益点,加速度随油门增大应保持线性增加的趋势,直到达到最大加速度点附近,加速度增加趋势趋于平缓,最终趋近100%油门点。某车速下系统增益值的大小决定了加速度梯度线随油门增加的梯度。

图17 加速度梯度曲线
4.4 发动机转矩形态设计
4.4.1 发动机转矩传递模型
发动机转矩控制分为等功率型、等转矩型和轴扭型。如今AT 变速器车型通常按变速器输出轴即轮端转矩的风格来进行设计,以保证各挡位动力输出的风格一致性。而从变速器输出轴转矩到发动机油门需求转矩的控制过程,中间需考虑转矩的损失和衰减,其中包括变速器的速比和效率、液力变矩器系数、飞轮惯量损失、发动机瞬态衰减等。通过一系列算法反推的发动机目标转矩可以保证输出轴转矩的一致性。
从加速度响应曲面出发,结合特定的换挡策略,能够根据传动关系及效率惯量损失,确定发动机转矩控制图谱(PedalMap),从而实现了从驾驶性风格及性能目标到控制变量参数的正向设计。
4.4.2 分挡位转矩衔接设计
基于多挡位PedalMap 模型的自动变速器车型转矩设计中,可以针对各个挡位的动力需求进行设计。理论上可以通过PedalMap 以及局部转矩调节的控制,在发动机能力足够的情况下,获得无感的换挡体验。以变速器升挡为例,如图18 所示,在转矩相中,离合器开始动作,实际速比已经开始变化,如果转矩维持不变,车辆加速度将呈现降低趋势,此时应该适当补扭,以维持轴端的稳定输出。在速度相,发动机进入调速环节,由于发动机轴的惯量能量会释放到轮端,此时如果转矩不变会导致输出轴上的动力冲击,需要相应地进行降扭以维持输出轴动力稳定。速度相结束后,需要提升发动机转矩至下一挡位PedalMap 状态,为实现换挡前后的动力接近,应选用相近的功率以及更高的转矩。

图18 有动力升挡转矩调节过程
5 数据实测对比
5.1 时域数据与目标比较
经过加速曲面的理论设计和实车优化,可以看到加速度-速度曲线与设计值比较接近,在某些局部点由于传动系统控制的能力,和竞品以及目标线相比仍然存在差异,如图19所示。

图19 改进前后加速度与目标比较
5.2 加速驾驶性评价指标比较
根据驾驶性正向设计方法及控制优化得到的响应曲线,可以计算对应响应性、平顺性及收敛性的驾驶性关键指标数值,见表1。由表1 可知,经过驾驶性设计的优化,大部分高感知指标都得到了改善,与某竞品的差异也大幅度缩小。

表1 改进前后驾驶性指标比较
6 结论
(1)从客户需求出发,构建了起步加速过程的驾驶性客观评价指标,从响应性、平顺性、收敛性和风格等维度对驾驶性表现进行了研究,获得了驾驶性正向设计的开发需求。
(2)通过对竞品的驾驶性测试和数据分析,完成了加速响应曲面的正向设计,利用转矩传递和跨挡位转矩衔接模型,对整车驾驶性能进行了优化设计,显著改善了驾驶体验。
