基于等效力的汽车主动避撞模型及其仿真
2022-02-20谭子坤朱孙科罗天洪郑讯佳
谭子坤,朱孙科,罗天洪,郑讯佳,3,4
(1.重庆交通大学机电与车辆学院,重庆400074;2.重庆文理学院智能制造工程学院,重庆402160;3.汽车噪声振动和安全技术国家重点实验室,重庆401122;4.中国汽车工程研究院股份有限公司,重庆401122)
随着汽车保有量的日益增多,引发的交通安全问题也日益严重。20 世纪80 年代以来,汽车防抱死系统(Anti-lock Braking System,ABS)、车身稳定性程序(Electronic Stability Program,ESP)等主动安全系统被人们普遍认可。近年来,以汽车前撞预警系统(Forward Collision Warning,FCW)、车道偏离预警系统(Lane Departure Warning,LDW)、自动紧急制动系统(Automatic Emergency Braking,AEB)为代表的高级驾驶辅助系统得到快速发展,在汽车安全方面发挥着至关重要的作用。
在美国高速公路交通安全署(National Highway Traffic Safety Administration,NHTSA)的大力推动下,汽车主动避撞系统得到快速发展,许多模型被相继提出。比较有代表性的模型有:避撞时间TTC(Time to Collision)模 型、车 头 时 距(Time Headway)模型、Berkeley 模型和马自达模型,在汽车横向上有CCP模型、TLC 模型和VRBS模型。王建强等通过真实道路试验获得乘用车驾驶员特性试验数据,得到不同类型驾驶员跟车行为特性参数,提出了适应驾驶员特性的TTC报警算法。胡远志等利用驾驶员特性提出一种新型TTC 建模方法。冀杰等利用三角函数和指数函数,构建了道路和障碍物三维虚拟危险势能场来全面反映不同道路路况下的车路一体化危险行车状况,实现主动避撞。
上述模型和文献仅从人或路因素来判断汽车的行车安全性,从而达到主动避撞的目的。但汽车行车过程中是人-车-路相互耦合的关系,三者的变化都会影响汽车主动避撞效果。章军辉等建立了基于BP 神经网络的闭环驾驶跟驰习惯模型,该网络模型包含人-车-路3 个因素作为输入,通过BP神经网络的训练之后,该理论模型对不同的驾驶群体拥有良好的适应性。WANG Jianqiang 等利用行车风险场将汽车行车过程分为行为场、动能场和势能场,分别包含了人-车-路3 个因素来判断汽车的行车安全。这两种主动避撞模型考虑了人-车-路3个因素,汽车的主动避撞效果较好,但模型复杂,参数难以标定。
上述模型考虑了人-车-路3 个因素,但模型比较复杂。因此,本文在ZHENG Xunjia 等提出的等效力理论基础上,加入人-车-路3 个因素中的主要因素,为汽车主动避撞提供了一个新模型。该模型与不同行车环境中的标准等效力模型相比,能够保证汽车主动避撞效果和汽车跟驰距离。
1 行车风险量化
1.1 行车风险的场模型
智能汽车根据车载设备实时监测目标车辆周围的车辆信息和自身行车状态,通过算法处理复杂的车辆信息进行行车风险评估。行车风险场定义为各研究对象间场的相互作用,用以描述人在交通环境中对风险的辨识,行车风险通常发生在汽车之间,或汽车本身与道路环境之间,行车风险不能独立存在。因此,在汽车行车过程中两个对象之间的风险用场表示为:

式中:为行车过程的场源;为道路中的某一点;U为场源在处的势场能;M为行车过程中的自身属性;v为场源的速度;d为场源到的距离函数;F为势场能U的负梯度,即点处受到的场力,负号代表沿场梯度下降的方向,当场源属性和运动状态一定时,越靠近场源所受到的场力越大。
1.2 等效力模型
在汽车的驾驶过程中,每辆汽车都具有动能,汽车从起步开始加速至某一速度的过程中,实际上是汽车动能不断增长的储能过程,若在某一时刻与某一物体发生碰撞事故,则其储存的能量将释放和转移并导致弹性和塑性变形。在碰撞过程中,动能越大造成的损失就越大。
通过文献[13]和[14]分析了汽车碰撞过程中力做功和能量转化之间的关系,得出等效力。对于单个运动过程中的汽车q,则有:

式中:、分别为汽车q 的动能、质量、速度;为在汽车q 运动方向上的任意一点与汽车q之间的距离。
令:

则式(3)可写为:

式中:为运动的汽车q 在交通环境中对点产生的等效力,并用其描述汽车对交通环境中点造成的风险,单位为N。
由于在汽车行驶过程中,只有在一定的距离时才能够影响后方车辆,超过一定距离的时候将不会对后方车辆造成影响,所以修正之后的等效力为:
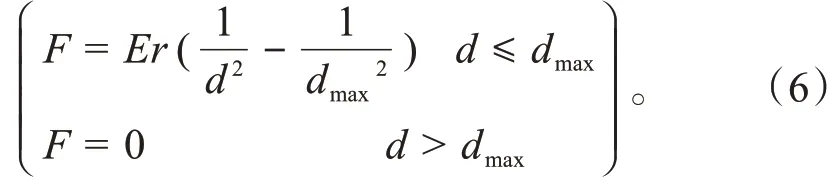
式中:为驾驶人的跟车距离,它与驾驶员的驾驶特性有关;为前车与后车之间的距离;为前车最大影响距离。
2 主动避撞模型以及策略
2.1 主动避撞模型
图1 为汽车i 和汽车j 的跟驰场景。在纵向上,当汽车进入危险时刻时,汽车主动避撞系统开始预警避撞,所以本文只考虑后方汽车在前方汽车的等效力作用范围之内。在前方汽车的等效力范围之外,汽车将不受等效力的作用。
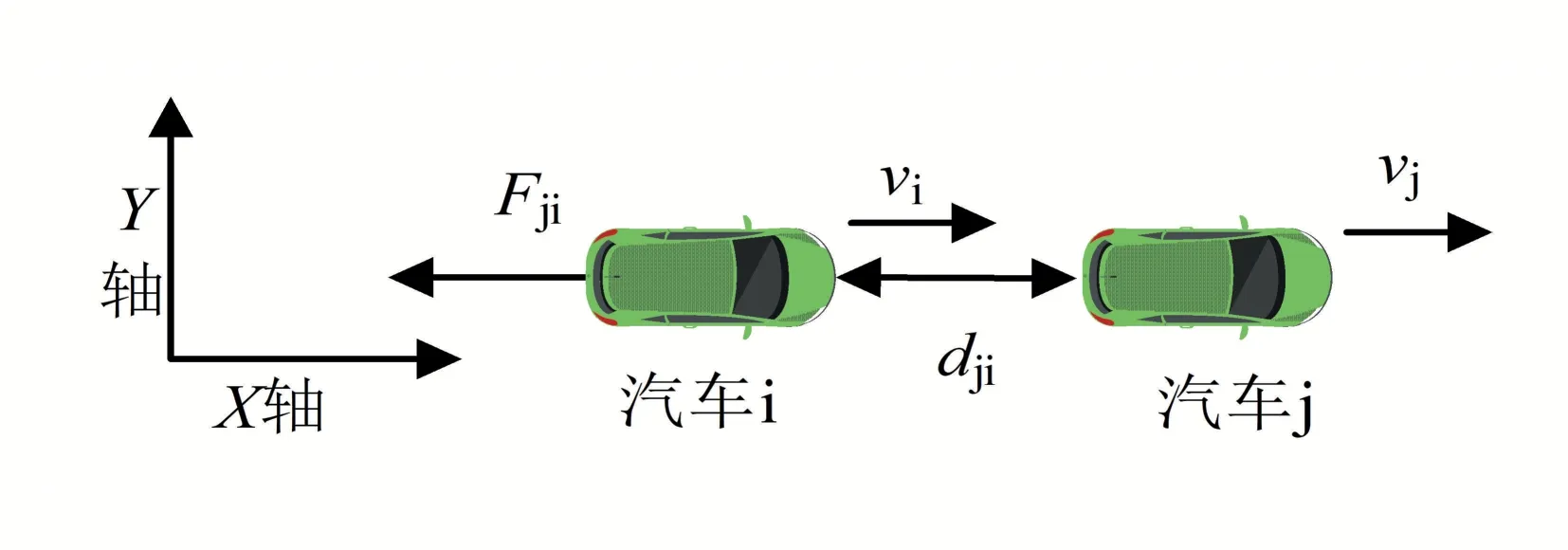
图1 汽车i和汽车j的跟驰场景
将道路因子和速度因子加入等效力的模型中,则汽车的主动避撞模型为:

式中:为当前道路因子,因在道路因子中路面的附着系数会影响汽车的制动距离,这会大大地影响汽车的跟驰距离以及主动避撞系统介入时间,所以本文在道路因子中只考虑路面附着系数;为速度因子,在汽车行车过程中,当某车的速度与其他汽车的速度有明显不同时,将造成交通扰动,交通扰动是破坏交通稳定性造成交通拥堵的重要原因,在拥堵的交通中,更易发生交通事故。所以当汽车的速度与其他汽车的速度明显不同时,行车过程中的风险会增加,速度差越大,受到的风险越大。
驾驶人的跟车距离,根据文献[20]将驾驶员分为3 类,分别为:冒进性、平稳性、保守性,他们所对应的跟车时距为1.82 s、2.50 s、3.03 s。数值设定为:

式中:为不同驾驶员的跟车时距;为自车车速。道路因子设定为:

式中:为标准的道路附着系数;为实际道路的附着系数。
速度因子设定为:

式中:为后车的速度;为前车的速度。
2.2 主动避障预警策略设计
主动避障预警策略的关键是主动避撞系统介入时刻的选择。本文根据其在实际行车过程中的等效力与标准等效力进行实时对比,实现主动避撞系统介入时刻的选择。根据多次仿真的结果,设置汽车产生等效力的作用范围为3 s 时距,将在理想环境下后方汽车位于前方汽车的1.5 s时距等效力的值作为标准等效力的值。通过汽车实际行车过程中受到的等效力与标准等效力两者进行实时对比,进行预警避撞。本文主动避障策略如图2 所示,将汽车受到的等效力大于标准模型受到的等效力时刻作为主动避撞系统介入时刻,汽车开始制动。
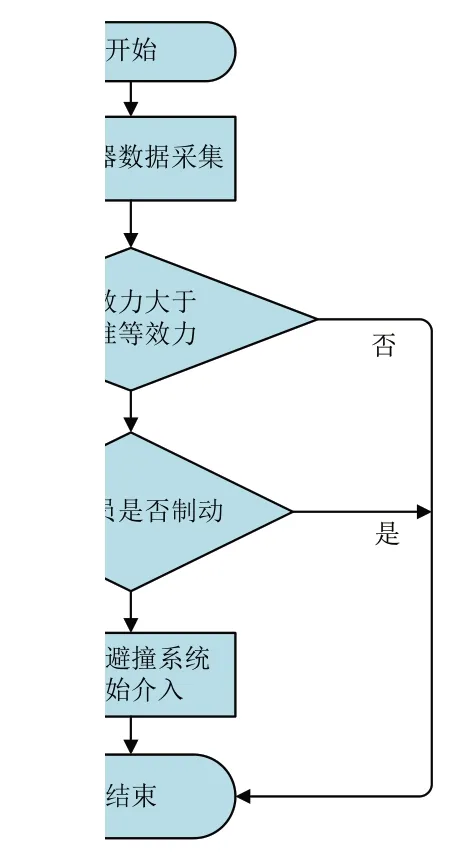
图2 主动避撞预警策略流程
3 仿真结果分析
3.1 仿真设备及其数据设置
针对本文的模型,采用Matlab2017 版和Car-Sim2017.1 版进行仿真试验,汽车i 的初始速度分别为100 km/h、80 km/h,汽车j 的速度为80 km/h、60 km/h,两车开始相距100 m,仿真时间为35 s。本文仿真试验中,驾驶员均为未有制动行为。
当汽车i的初始速度为100 km/h;汽车j的速度为60 km/h时,设置等效力标准模型,参数见表1。实际不同道路的行车等效力仿真参数,见表2。实际不同驾驶员类型行车等效力仿真参数,见表3。

表1 vi_0=100 km/h时,标准等效力模型参数
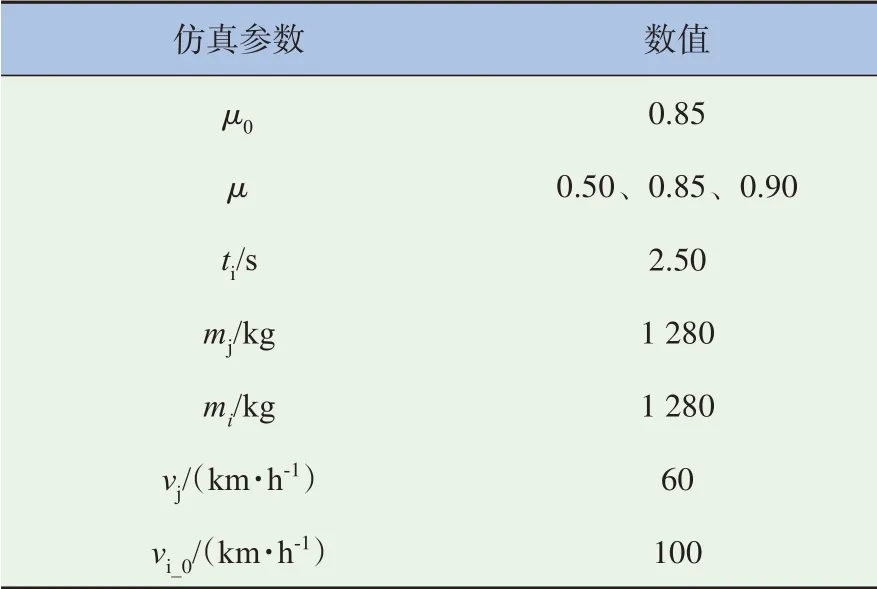
表2 实际不同道路行车等效力仿真参数
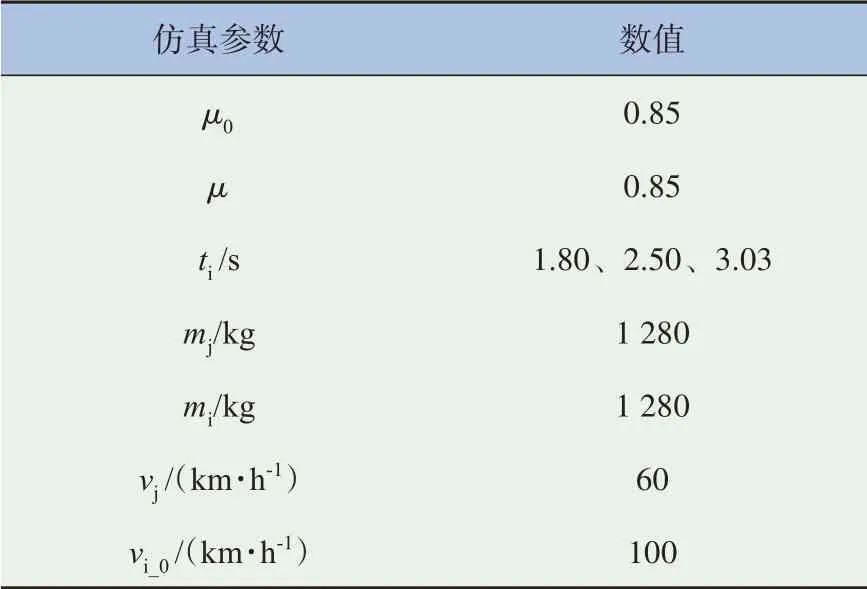
表3 不同驾驶员类型行车等效力仿真参数
3.2 仿真结果分析
实际地面附着系数分别为0.50、0.85、0.90时,汽车i 的速度、两车距离、开始制动时间和最后两车跟驰距离分别如图3和表4所示。

图3 μ分别为0.50、0.85、0.90时,汽车i的速度、两车距离
在行车过程中,地面附着系数会影响汽车的制动效果,地面附着系数越低,汽车制动效果越差,制动距离越大。由图3 和表4 可知,当地面附着系数越低时,汽车的主动避撞系统介入时间越提前,并且两车最后的跟驰距离越大。这一规律符合实际行车过程中的驾驶规律,地面条件不好的情况下,驾驶员会增加与前车的跟驰距离,以确保行车的安全。
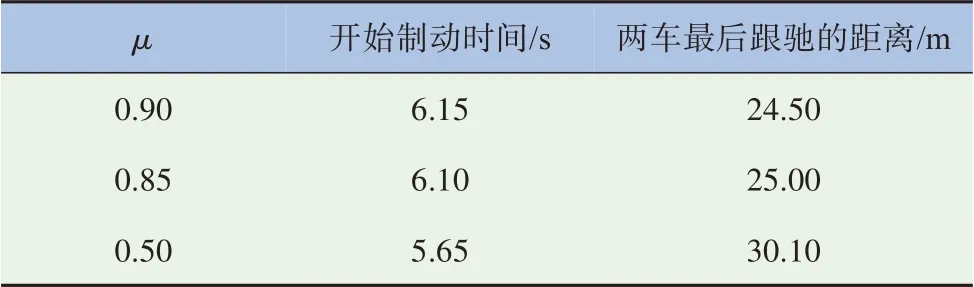
表4 不同μ值时,汽车i的开始制动时间和两车最后跟驰距离
不同驾驶员特性时汽车i 的速度、两车距离、开始制动时间和最后两车跟驰距离分别如图4 和表5所示。

图4 ti分别为1.80、2.50、3.03时,汽车i的速度、两车距离

表5 不同ti值时,汽车i的开始制动时间和两车最后跟驰距离
在行车过程中,驾驶员越激进,两车的跟驰距离越小,驾驶员的制动行为越滞后,越可能导致追尾。由图4 和表5 可知,当驾驶员越激进,主动避撞系统介入时间越提前,且两车保持的跟驰距离越大,以保证两车的安全。
当汽车i 的初始速度为80 km/h;汽车j 的速度为60 km/h时,仿真参数见表6。

表6 vi_0=80 km/h时,标准等效力模型参数
其仿真结果如图4和表7所示。

表7 vi_0=80 km/h、100 km/h时,汽车i的开始制动时间和两车最后跟驰距离
在实际行车过程中,若后方汽车的速度越小,两车所到达危险距离的时间越长,则主动避撞的介入时间越滞后。由图3、图5 和表4、表7 可知,当汽车i 的初始速度越大时,主动避撞系统介入时间越提前,这也符合实际行车驾驶的规律。
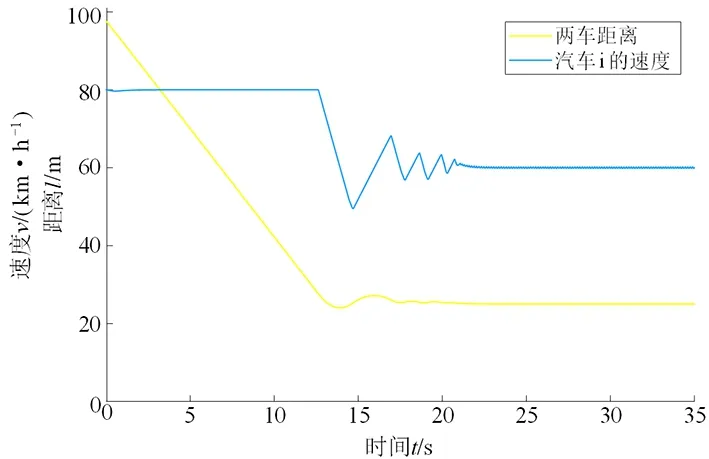
图5 vi_0=80 km/h时,汽车i的速度、两车距离
当汽车i的初始速度为100 km/h;汽车j的速度为80 km/h时,仿真参数见表8。
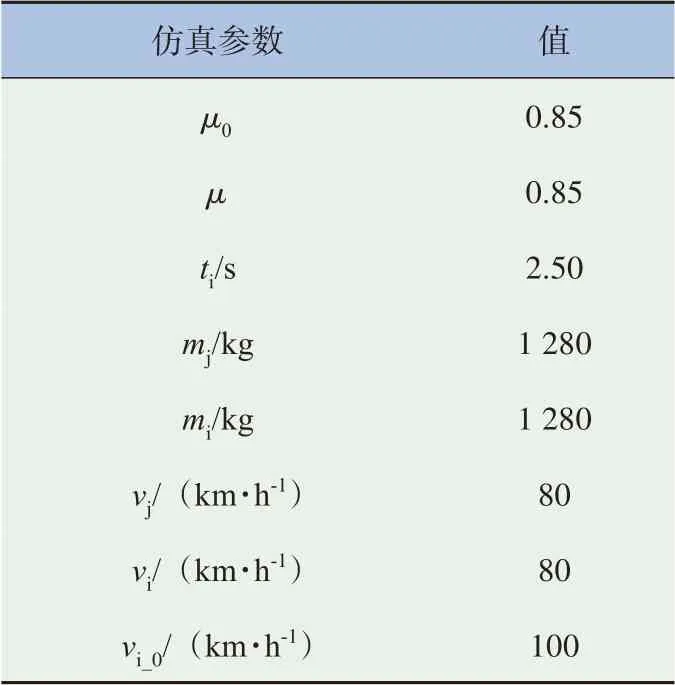
表8 vj_0=80 km/h时,标准等效力模型参数
其仿真结果如图6和表7所示。

图6 vj=80 km/h时,汽车i的速度、两车距离
由图5~6 和表7 可知,当两车的相对速度一致时,由于前车的速度越大其产生等效力的作用范围越大,且当汽车的速度越大时,汽车的动能越大。若汽车发生碰撞的严重程度越大,就会使两车的跟驰距离变大。这符合实际行车过程中驾驶员的驾驶习惯。
4 结论
(1)针对行车的复杂过程,本文提出地面附着系数、驾驶员激进程度、汽车速度3 个主要的影响因素,以等效力理论为基础建立了一个新的汽车主动避撞模型。
(2)经仿真表明,该模型在不同的行车环境下均可保证汽车主动避撞效果且可根据行车环境决定汽车最后的跟驰距离。该模型简单且能保证行车环境不同时的汽车主动避撞效果。
(3)本文主要考虑影响行车安全的3 个因素,未来可考虑更多因素,如:能见度、道路曲率、汽车类型等,以增强模型在实际行车过程的主动避撞效果。
