仿鹰-欧椋鸟智能行为的无人机集群追逃控制
2022-02-17于月平袁莞迈段海滨
于月平 袁莞迈 段海滨
1.北京航空航天大学自动化科学与电气工程学院 北京 100083 2.中国电子科技集团公司信息科学研究院 北京 100041
无人机(unmanned aerial vehicle,UAV)是一种“平台无人, 系统有人”的飞行器, 与有人机相比, 具有体积小、成本低、速度快和灵活性强等优势, 能够代替有人机执行“枯燥、恶劣、危险、纵深”的复杂任务,有效避免人员伤亡[1]. 但由于单架无人机的态势感知和信息处理能力有限, 难以独自应对日益复杂的作战环境, 因此, 无人机集群对抗逐渐成为未来智能化战争的发展方向[2].
无人机集群对抗是一个复杂的非线性动态过程,参与对抗的无人机必须具有自组织、自适应特点, 能探测信息, 评估战场态势, 进行战术决策[3]. 对抗中,攻方无人机需要确定合适的追击策略, 力求在最短的时间内击落防守方. 与此同时, 防守方要适时调整逃逸策略, 最大程度上降低损失[4]. 因此, 无人机集群追逃控制的研究对于占据未来空战制高点具有重要意义.
关于追逃问题的研究, 最早起源于对生物界捕食逃逸现象的分析和建模, Janosov 等为了再现自然界真实群体追逐现象, 建立了一个考虑时间延迟、外部噪声和有限加速度的群集运动模型, 同时提出了一种独特的集体追逐策略, 并研究了它们在追逐一个快速、不规则运动猎物时的特性[5]. Chen 等受群体捕食者狩猎和觅食行为的启发, 提出了一种多参与者的追逃博弈模型, 重点分析了追捕者初始条件设置对追捕结果的影响[6], 但其为了实现以规范的形式对目标进行包围, 限制条件太过严苛, 不具备一定程度上的自适应性. Wang 等基于深度确定性策略梯度算法, 提出了一种带通信的分布式协同追击策略, 追逐者可以凭借有效的交互, 追捕一个由智能逃生策略驱动的高级逃生者[7]. 但是该方法运算量大, 对处理器性能要求高, 不适用于空战场景下的无人机集群追逃控制. 温广辉等在群体智能技术框架下, 对多导弹时间敏感型协同攻击与防御中的分布式协调控制问题进行了研究和展望[8], 但只给出了关键技术分析和理论框架, 没有给出控制率设计和仿真实验. 郭褚冰等提出了一种改进Vicesk 模型, 并结合无人集群突防攻击的典型作战场景, 设计了有效的控制协议和信息收发流程, 提升无人机群在拒止环境下的协同作战能力[9]. 但其侧重作战双方中一方无人机集群通信方式的建模, 忽略了对抗过程中追逃双方间的交互. 无人机集群追逃行为与鸟类中的捕食-逃逸行为具有很强的相似性, 因此, 可以借鉴鸟类中杰出捕食者和逃逸者的策略, 来扩充无人机集群追击和逃逸战术库.
哈里斯鹰是一种具有独特魅力的猛禽, 因其独特的群体狩猎策略区别于其他机会主义猎食者, 一直以来备受关注. 在墨西哥州的沙漠中, 哈里斯鹰通常会组成包含2~6 个个体的狩猎队, 通过个体间的相互配合, 提高了鹰群整体的捕获成功率和每只鹰获得的平均能量[10]. Bednarz 等通过观测哈里斯鹰捕捉长耳野兔, 发现当鹰群找到猎物的藏身之处后, 他们会采取伏击策略, 每只鹰的分工不同, 并不断轮换,以实现长时间的持续追逐[11]. Coulson 等描述了6 只哈里斯鹰在电线杆上依次进行“跳蛙”的行为, 通过相互模仿,实现了在移动中的接力搜索和狩猎[12]. 哈里斯鹰凭借合作狩猎, 可以捕获大型或者危险的猎物.因此, 将哈里斯鹰的智能行为映射到无人机集群追击过程中, 可以有效增加追击成功率.
欧椋鸟群集体逃逸的模式一直受到科学家们的广泛关注, 当欧椋鸟群受到猛禽, 如游隼攻击时, 它们表现出多种多样的集体逃逸模式, 可以有效降低被捕食的风险. Storms 等[13]分析了游隼捕猎成千上万只欧椋鸟的视频片段, 展示了几种常见的集体逃跑模 式:“快速 膨 胀”“变黑”“波 浪”“空 泡”“警 戒 线”和“分离”, 并通过统计数据得出结论, 某一时刻集体逃跑的模式取决于它们上一时刻的模式以及游隼的威胁程度. Hemelrijk 等重点研究了欧椋鸟群典型逃逸响应“扰动波”, 发现其起源于靠近捕食者的一侧[14],以近似固定宽度的暗带在1 s 内穿过整个群体. 观测结果表明这种现象的产生和威胁信息传递, 以及个体间的协同运动有关. 欧椋鸟群在栖息地上方表现出很强的空间聚集性, 能够快速同步有效地应对捕食者的攻击. 其智能行为对无人机集群逃逸战术的建立具有重要启发意义.
本文通过分析哈里斯鹰群的合作狩猎行为, 提出了鹰群追捕策略, 通过分析欧椋鸟群的群体逃逸模式, 设计了欧椋鸟群逃逸策略, 以此构成攻方无人机的追击战术库和防守方无人机的逃逸战术库. 为使攻防双方按照设计的战术运动, 结合实际场景, 提出目标态势评估指标和改进社会力模型, 使无人机集群可以进行有效的追击和逃逸.
1 鹰群追捕策略建模
合作狩猎, 通常是指一个物种以协调的方式追逐、捕获和分享相对较大或者难以捕捉的猎物的现象. 哈里斯鹰群在合作狩猎中, 每只鹰不断观察其他鹰的行为, 它们几乎是同时发现猎物并且锁定捕食目标的, 整个鹰群看起来似乎由一个网络连接. 在追捕过程中, 鹰群根据具体情况采取不同的策略, 以减少觅食成本, 提高捕获效率[15].
1.1 目标选择
在自然界中, 捕食者在面对一群猎物时选择猎物目标的方法主要有4 种:距离最近的、最中心的、最边缘的和最孤立的[16]. 目前已有文献研究的大都是单捕食者如何进行目标选择, 考虑到鹰群合作狩猎过程中的协调性, 对多捕食者目标选择进行建模.
因为鹰在所有动物中以视觉极为敏锐而著称,并且在捕食过程中, 每时每刻都注意着同伴的反应,所以可以认为每只鹰都能实时的获取鹰群和猎物群的位置.为了保证4 种目标选择的唯一性, 以鹰群的中心位置为基准, 给出4 种目标的定义, 如图1 所示.
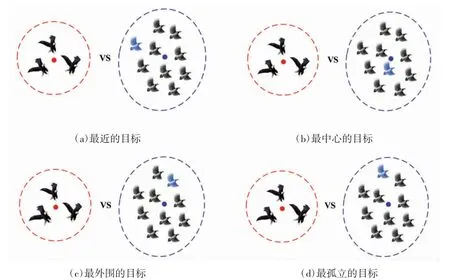
图1 鹰群目标选择示意图Fig.1 Schematic diagram of target selection in flocks of hawks
在第1 种方案中, 鹰群选择追捕最近的猎物, 最近的猎物可能也是最快到达的猎物, 因此, 可以减少鹰群在时间和能量上的消耗. 最近的猎物lable1被定义为距离鹰群中心最近的个体.

在第2 种方案中, 鹰群选择追捕最中心的猎物,以此冲散整个猎物群, 降低猎物群的混淆效应, 为下次进攻提供更好的攻击目标. 最中心的猎物lable2被定义为距离猎物群中心最近的个体.
在第3 种方案中, 鹰群选择追捕最边缘的猎物,边缘的猎物由于缺少周围同伴的掩护, 往往更容易被鹰群发现, 并且鹰群追踪过程中, 不易混淆它和周围个体. 用猎物自身的外围度Cj来定义其边缘程度[17].表示猎物j 的外围邻居个数;Rj为猎物j 的交互邻居半径,通过外围度的定义可以看出, 猎物外围度值越大, 代表猎物所处的位置越边缘.
在第4 种方案中, 鹰群选择攻击最孤立的猎物,最孤立的猎物具有最大的危险区域, 需要更多的时间来实现聚集, 即鹰群拥有更充裕的时间来追捕该猎物. 最孤立的猎物lable4定义为相对于捕食者而言与其最近邻居有最大角度的个体.

其中, k 表示第j 个猎物最近邻居的序号, 符号〈·〉用来求解两个向量间的夹角.
1.2 目标选择
在选择好4 个可行的攻击目标后, 鹰群需要根据实际情况进行目标分配, 采取的最常见的方式是大家都选择最具劣势的目标进行“突袭”, 如图2 所示. 整个过程非常迅速, 鹰群从目标猎物的四周逐渐靠近猎物, 过程中, 鹰个体间除了需要避免自身间的碰撞, 还要在靠近目标猎物时保持一定的间距, 便于全面获取目标信息和对目标进行全方位的追捕.

其中, Targeti表示第i 只鹰所选的追捕目标号;Score为鹰群对每个追捕目标的优势打分.
1.3 分散捕食
真正的合作捕食和其他形式群体捕食的根本区别在于, 在某些时刻, 个体的攻击目标选择不是为了提高自己捕获猎物的成功率, 而是以提高群体捕获成功率为目标. 鹰群在实际捕食过程中, 也会采用分散捕食策略, 即每只鹰选择不同的追捕目标, 有的负责破坏猎物群的结构, 有的负责快速捕获猎物, 各司其职, 整体形成复杂的混合战术, 如图2 所示.
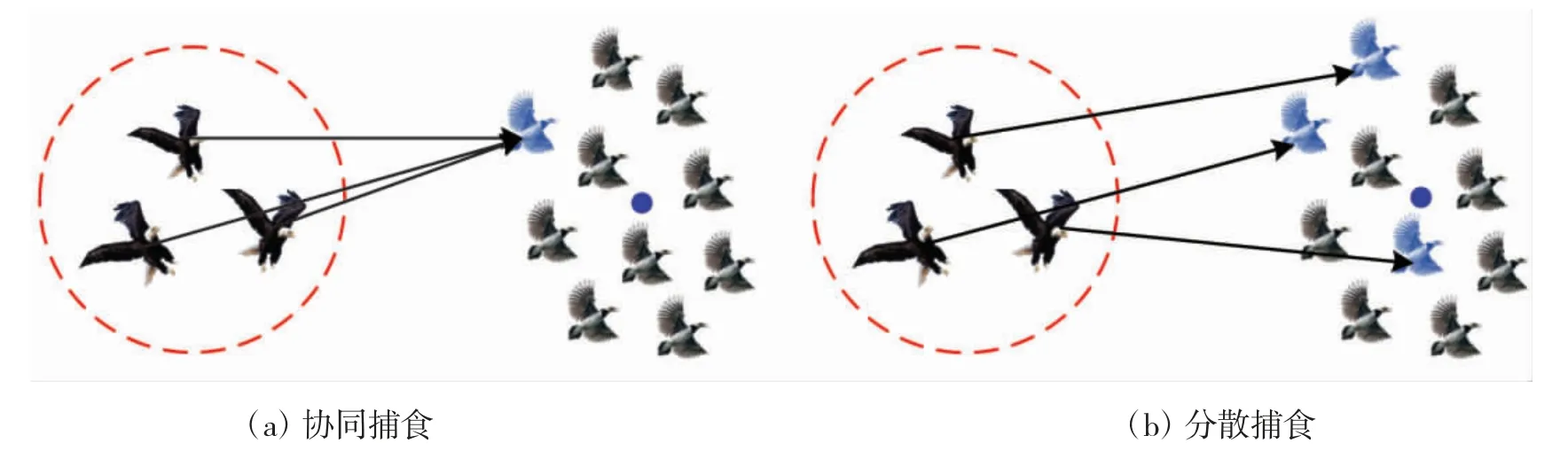
图2 鹰群捕食策略示意图Fig.2 Schematic diagram of hunting strategies in flocks of hawks

2 欧椋鸟群逃逸策略建模
2.1 交互方式
欧椋鸟群变幻莫测的逃逸模式是由于集群内个体间的局部交互产生的, 大量实际观测数据显示, 欧椋鸟群采用非尺度距离的交互方式, 即在进行交互邻居选择的过程中并非单纯依赖距离的大小[18]. 鸟类虽然具有发达的视觉, 但是其大脑认知能力具有局限性, 仅能处理有限邻居的运动信息. 相关研究表明,交互邻居太少时, 个体过强的独立性不利于其分享邻居有效信息, 交互邻居过多时, 有效信息又容易受到干扰和稀释, 因此, 个体和中等数量的邻居建立交互关系, 是最有利于实现信息的共享. 文献[19]通过重构欧椋鸟群中几千只鸟的三维位置发现, 每只欧椋鸟与平均数量的邻居(6~7 只)互动, 而不是与固定拓扑距离内的所有邻居互动, 如图3 所示. 与标准的尺度交互方式相比, 拓扑交互可以使群体具有更强的内聚性, 以抵抗外界干扰.
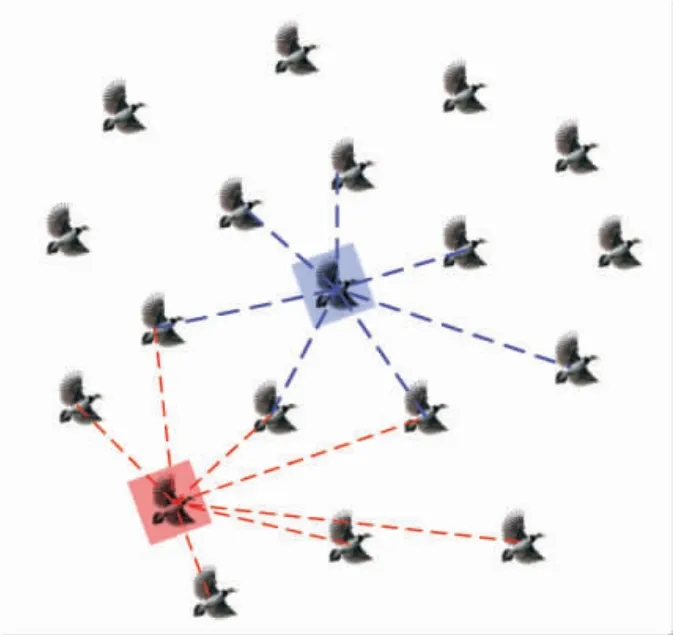
图3 欧椋鸟拓扑交互示意图Fig.3 Schematic diagram of topology interaction in starlings
那么个体i 的交互邻居半径可以用个体i 和其最远交互邻居间的距离表示

2.2 自主逃逸
文献[14]总共记录了210 起欧椋鸟群被游隼袭击的事件, 通过统计, 发现了7 种典型的逃逸模式,其中“变黑”“波浪”和“分裂”的发生频率为36.4%、25.8%和15.8%, 是最常见的3 种模式.“变黑”展现的是欧椋鸟群整体或者部分聚集程度加大, 密度变大导致颜色变化.“波浪”描述的是个体逃逸速度不一样, 导致后面的个体不断超越前面的个体.“分裂”现象的出现则是由于个体决策逃逸方向不一样. 这些逃逸模式虽然表象不一样, 但是其实质是相同的, 均是每个个体自主感知捕食者, 决策如何逃逸, 不受周围邻居决策的影响, 如图4 所示.
2.3 集中逃逸
欧椋鸟群在遇到捕食者时能迅速地转变方向,在这个过程中, 威胁信息可能仅仅被部分个体感知,但是危险信号能快速传播到整个群集. 群体中个体的运动能够影响距离远大于个体感知范围的个体的特性, 被称为群集的无尺度关联性, 是群体能够对外部刺激快速作出反应的基础[20].
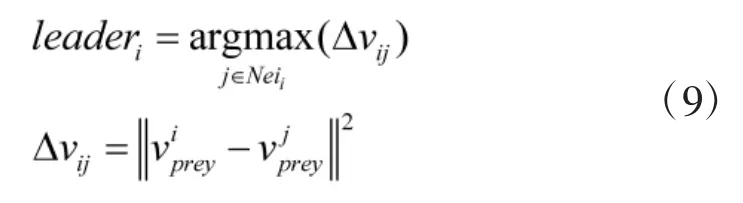
如果欧椋鸟群采取集中逃逸模式, 那么仅有距离捕食者较近的部分个体能进行自主逃逸, 其他个体由于没有感知到捕食者或是由于距离较远获取的捕食者信息不全面, 无法进行有效的自主逃逸, 它们通过观察周围邻居的状态变化, 找出邻域内状态变化最大的个体进行模仿, 整个群体在部分个体的带领下, 呈现集中逃逸模式, 如图4 所示.
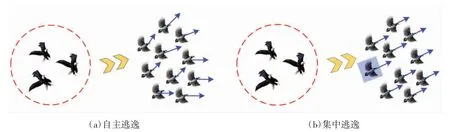
图4 欧椋鸟群逃逸策略示意图Fig.4 Schematic diagram of escaping strategies in flocks of starlings
考虑到模型的简洁性和易实施性, 此处只考虑距离捕食者最近的个体可以进行决策, 其他个体均不具备自主决策的能力, 仅能选择周围的邻居个体进行模仿. 被个体i 模仿的邻居的序号可以表示为
3 仿鹰群智能的无人机集群追击控制
受鹰群合作捕食智能行为的启发, 本节将鹰群追捕策略映射到无人机集群追击控制中, 为无人机集群对抗中攻方无人机提供有效的战术. 假设攻方无人机集群是由numh个无人机组成, 防守方无人机集群是由numh个无人机组成, 每架无人机的动力学方程可以描述为[21]
其中, pi、vi分别表示无人机i 的位置和速度;veli、φi分别表示无人机i 的速率和航迹方位角;ui代表无人机i 的控制输入.
3.1 目标态势评估
攻方无人机集群在确定可选攻击目标时, 采用鹰群目标选择的方法, 4 种攻击目标确定后, 需要对这4 种不同的目标进行态势评估, 以判断攻方无人机集群对不同目标的优势程度, 为不同追击战术下的目标分配奠定基础. 攻方无人机集群对目标的态势评估主要包括角度优势指标、方位优势指标、距离优势指标和攻击可能性优势指标[22].
角度优势指标scorea表征了攻方无人机集群整体对目标lablem的平均攻击机动难度, 是攻方平均速度向量与从攻方几何中心指向目标lablem的向量之间角度θa的函数, 如图5 所示, 可以表示为
图5 目标态势评估示意图Fig.5 Schematic diagram of situation assessment for target


3.2 协同追击运动控制
攻方无人机集群在协同追击模式下, 选择攻击态势评分最高的目标Targetmax进行追击. 攻方无人机通常作战能力较强, 所以设定其可以获取己方和敌方所有无人机的信息. 无人机i 的控制输入可以表示为[23]



3.3 分散追击运动控制
攻方无人机集群在分散追击模式下, 每架无人机自主选择攻击目标Targeti, 并且通过实时交互, 满足每种目标都有无人机进行追击. 在本文考虑的场景下, 攻方无人机的数量少于攻击目标种类, 所以可以实现每架无人机都能攻击不同的目标. 无人机i 的控制输入可以表示为
4 仿欧椋鸟智能的无人机集群逃逸控制
4.1 群集运动控制
防守方无人机一般战斗力较弱, 通信半径和感知半径有限, 在没有检测到攻方无人机时, 无人机集群做群集运动, 实现聚集和速度协同, 为逃逸做准备.无人机i 采用式(7)的方式确定交互邻居集合neii, 普通群集运动下无人机i 的控制输入可以表示为[24]满足期望, 并且彼此间距适当. 防守方的群集运动使个体间在执行战术时的相互协调性和配合度增强,整体的防御能力得到提高.

4.2 自主逃逸运动控制
4.3 集中逃逸运动控制
防守方无人机集群在集中逃逸模式下, 最先探测到攻方无人机的个体受到其探测半径内所有攻方无人机的排斥力, 进行自主逃逸, 其他无人机则切换到集中逃逸模式, 按式(9)选出临时领导者,跟随其一同逃逸[26].在该模式下, 防守方中的个体分为3 种, 第1 种为最先探测到攻方无人机的个体, 其控制输入可以表示为

第2 种是个体i邻居集合中存在可以模仿的个体leaderi, 其控制输入可以表示为

第3 种是个体i邻居集合中不存在可以模仿的个体, 则其控制输入表示为式(18).
5 仿真及分析
设定本文的仿真场景如下, 蓝方派出一群无人侦察机前往红方基地进行侦察, 在临近红方基地后,红方基地的侦察系统发现蓝方无人机, 红方派出无人战斗机对蓝方进行追击, 红方的目的是击落所有的蓝方无人机, 蓝方的目的则是逃离红方的军事区域, 所以红方为攻方, 蓝方为防守方. 蓝方无人侦察机有30 架, 红方无人战斗机有3 架, 无人战斗机的通信半径和探测半径均远大于无人侦察机, 每架无人战斗机均能实时获取己方和敌方的信息, 无人机侦察机获取的信息则相对有限. 红方采用仿鹰群的追击战术, 蓝方采用仿欧椋鸟群的逃逸战术.
第1 阶段蓝方无人机集群在空中聚集, 以增强侦察和防御能力, 仿真歩长为0.1 s, 仿真总时长为30 s, 蓝方初始时刻位置、速度随机分布, 其他具体参数如表1 所示. 对于蓝方无人机而言, 规定其和友机交互半径的初始值为对齐半径. 因为交互方式选择的是拓扑交互, 所以后面和友机的交互半径是每架无人机和其最远邻居间的距离, 通信范围只需要保证设定的交互数目能得到满足即可.

表1 蓝方无人机集群参数Table 1 The parameters of UAV swarm in blue side
蓝方无人机群集运动的轨迹图如图6 所示, 图中空心圆圈代表无人机的起点, 实心圆圈代表无人机的终点, 直线表示无人机的运动轨迹, 可以看出,蓝方无人机集群从散乱分布实现最终的聚集, 聚集后个体间间距分布均匀, 便于全方位的获取战场信息. 为了进一步对蓝方无人机集群自组织运动特性进行分析, 给出序参量、尺度指数、平均最近距离的定义,其中,序参量表征个体运动方向的同步程度,尺度指数表征群体尺度, 平均最近距离表征群集密度指标, 定义如下[27]
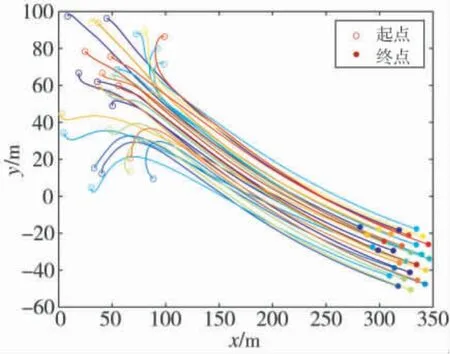
图6 蓝方无人机群集运动仿真结果图Fig.6 Simulation results of UAV swarm motion in blue side

其中, p(ct)表示群集的平均几何中心;表示个体i 的最近邻距离.
图7 和图8 分别从速率和运动方向方面分析了蓝方无人机集群的运动一致性. 从图7 可以看出, 每架无人机的速率刚开始在指定范围内波动, 在大约10 s 时, 每架无人机的速率均趋于期望值10 m/s. 图8 为序参量变化曲线, 其取值范围在0~1 之间, 数值越大, 表示群集运动方向的一致性越高, 可以看出,经过大约5 s 的时间, 序参量从0.15 上升到1, 整个无人机集群的运动方向一致.

图7 蓝方无人机集群速率变化曲线Fig.7 Rate change curves of UAV swarm in blue side

图8 蓝方无人机集群序参量变化曲线Fig.8 Order parameter change curve of UAV swarm in blue side
图9 和图10 分别从尺度指数和平均最近邻距离方面, 分析了蓝方无人机集群的聚集性. 图9 为尺度指数变化曲线, 可以看出, 尺度指数不断减小, 在大概15 s 时稳定. 分析图10 可得, 平均最近邻距离逐渐下降, 大约15 s 时保持平稳. 综合上述分析, 蓝方无人机集群经过大约15 s 的时间, 实现了速度极化和稳定的聚集.

图9 蓝方无人机集群尺度指数变化曲线Fig.9 Scale exponential change curve of UAV swarm in blue side
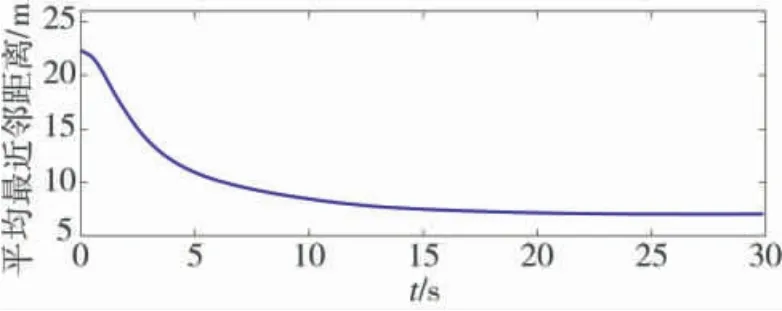
图10 蓝方无人机集群平均最近邻距离变化曲线Fig.10 Mean nearest neighbor distance change curve of UAV swarm in blue side
第2 阶段, 红方的侦察系统发现蓝方无人机集群, 派出无人战斗机对蓝方进行追击, 仿真步长不变,因为无人战斗机耗油量大, 追击时间有限, 设定仿真总时长为40 s, 40 s 后红方无人战斗机必须撤回. 红方初始位置距离蓝方中心大约300 m 处, 初始速度方向朝向蓝方, 其他参数如表2 所示. 对于红方无人机而言, 其只需要和一定范围内的友方无人机进行交互, 以避免发生机间碰撞, 交互半径范围只需略大于机间避障半径即可.

表2 红方无人机集群参数Table 2 The parameters of UAV swarm in red side
在仿真过程中, 设定红方无人机击落蓝方无人机的条件是, 每一次选择攻击半径范围内的一架蓝方无人机进行射击, 蓝方无人机被选中的概率和其与该红方无人机的距离成反比, 选择时采用轮盘赌算法, 并且设定射击后即可击落目标.
在仿真过程中, 设定红方无人机击落蓝方无人机的条件是, 每一次选择攻击半径范围内的一架蓝方无人机进行射击, 蓝方无人机被选中的概率和其与该红方无人机的距离成反比, 选择时采用轮盘赌算法, 并且设定射击后即可击落目标.
为了分析双方各自战术的优劣和适用场景, 在第2 阶段设置4 种追逃场景, 每种场景下的参数都相同, 不同的是双方采取的战术. 场景1:红方采用协同追击战术, 蓝方采用自主逃逸战术, 仿真结果如图11~图13 所示.
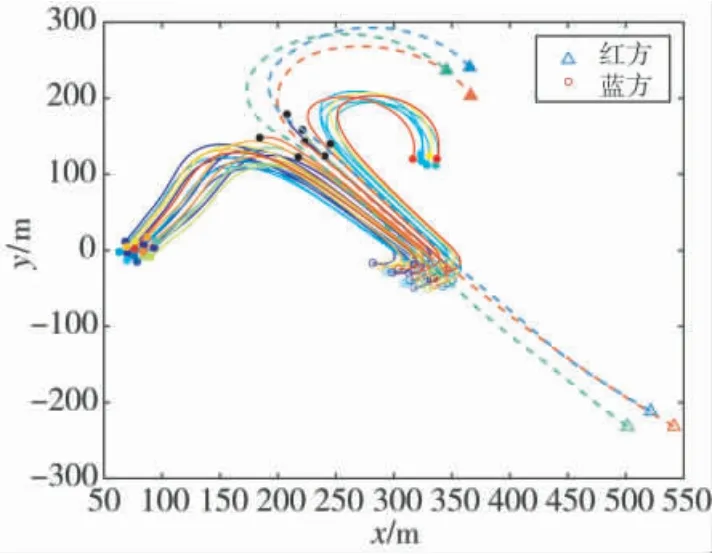
图11 场景1:红方追击蓝方仿真结果图Fig.11 Scene 1:simulation results of the red chasing the blue
图11 中三角形表示红方无人机, 虚线表示红方的运动轨迹, 圆形表示蓝方无人机, 实线表示蓝方的运动轨迹, 黑色表示被击落的蓝方无人机. 从图中可以看出, 采用自主逃逸战术的蓝方无人机集群在感知到红方存在后, 无人机受到红方的排斥力, 调转方向, 朝着背离红方的方向运动, 因为红方的速度大于蓝方, 随着它们之间距离的逐渐减少, 少数蓝方无人机被击落, 蓝方无人集群发生分群逃逸, 红方选择了数量少的一方继续追击, 以增加获胜概率. 但由于时间有限, 红方在继续追击的过程中, 没有击落蓝方无人机.
从图12 和图13 中可以看出, 0~3 s 间, 红方攻击目标不确定, 经过3 s, 红方确定了攻击目标为蓝方8号. 在接下来的20 s 内, 8 号飞机一直处于可选目标中最劣势的一方, 可以看出, 4 种情况下, 红方都是从51 s 开始, 红方持续追击8 号. 在大约52 s 时, 有蓝方无人机开始进入红方的攻击半径, 红方开始有选择性的射击, 攻击目标不断发生变化, 蓝方不断有无人机被击落, 55 s 时, 蓝方开始分群逃逸, 红方重新确定攻击目标.

图12 场景1:红方攻击目标序号变化曲线Fig.12 Scene 1:sequence number change curve of the red attacking targets
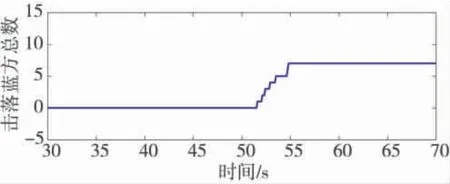
图13 场景1:红方击落蓝方总数变化曲线Fig.13 Scene 1:change curve of the total number of the blue shot down by the red
场景2:红方采用分散追击战术, 蓝方采用自主逃逸战术, 仿真结果如图14~图16 所示.

图14 场景2:红方追击蓝方仿真结果图Fig.14 Scene 2:simulation results of the red chasing the blue
对比图11, 虽然两种场景下红方采用的战术不同, 但是在蓝方无人机集群分群前双方的运动相似.分群后, 第2 种仿真场景下的红方采用分散战术, 它们选择的目标均在数量多的子群中, 并且因为采用分散战术, 红方无人机攻击区域重叠部分较少, 击落蓝方无人机的数量增多.
如图15、图16 所示, 采用分散战术的各架红方无人机攻击目标不同, 并且因为每时每刻都进行随机选择,攻击目标切换的频率很快,提高了追击成功率.
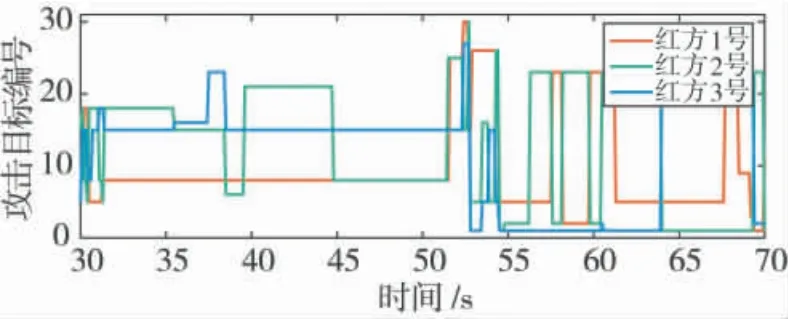
图15 场景2:红方攻击目标序号变化曲线Fig.15 Scene 2:sequence number change curve of the red attacking target

图16 场景2:红方击落蓝方总数变化曲线Fig.16 Scene 2:change curve of the total number of the blue shot down by the red
场景3:红方采用协同追击战术, 蓝方采用集中逃逸战术, 仿真结果如图17~图19 所示.
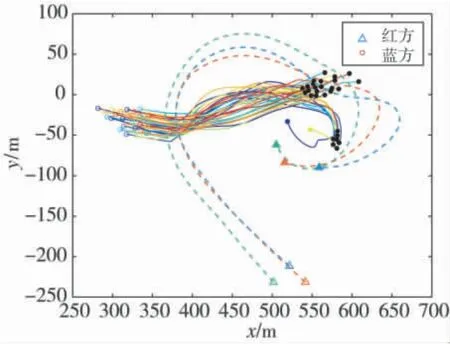
图17 场景3:红方追击蓝方仿真结果图Fig.17 Scene 3:simulation results of the red chasing the blue
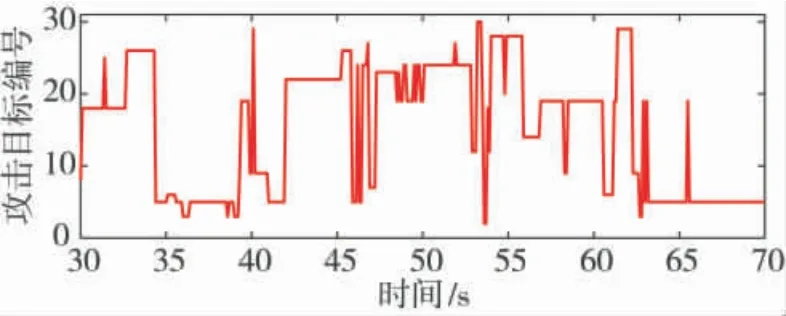
图18 场景3:红方攻击目标序号变化曲线Fig.18 Scene 3:sequence number change curve of the red attacking target

图19 场景3:红方击落蓝方总数变化曲线Fig.19 Scene 3:change curve of the total number of the blue shot down by the red
对比图11, 在红方都采用协同追击战术的情况下, 蓝方采用集中逃逸的效果差, 几乎所有的蓝方无人机都被击落. 集中逃逸战术中, 只有距离红方最近的蓝方无人机受到逃逸力, 主动逃逸, 其他无人机处于跟随逃逸状态, 虽然不需要每架无人机都进行信息探测和决策, 但是在红方战斗力比较集中的状态下, 不能进行有效的逃逸.
和图13 相比, 在第3 种仿真场景下, 第1 架蓝方无人机被击落的时间晚于场景1, 但是由于在集中逃逸模式下, 蓝方无人机集群没有发生分群, 使得红方无人机在速度占优的情况下, 快速击败蓝方.
场景4:红方采用分散追击战术, 蓝方采用集中逃逸战术, 仿真结果如图20~图22 所示.
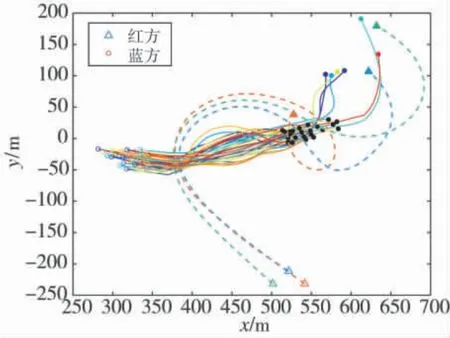
图20 场景4:红方追击蓝方仿真结果图Fig.20 Scene 4:simulation results of the red chasing the blue

图21 场景4:红方攻击目标序号变化曲线Fig.21 Scene 4:sequence number change curve of the red attacking target
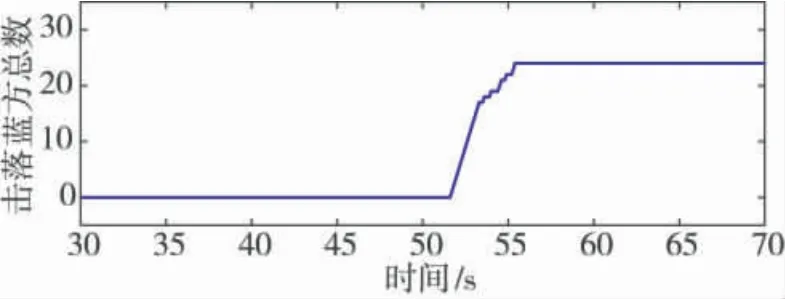
图22 场景4:红方击落蓝方总数变化曲线Fig.22 Scene 4:change curve of the total number of the blue shot down by the red
和第3 种场景相比, 在蓝方均采用集中逃逸战术下, 红方采用分散追击的效果略差于集中追击战术.可能是因为红方攻击目标分散, 使得蓝方无人机集群可以从红方攻击区域的空隙穿过, 进行有效的躲避.
将4 种情况下红方击落蓝方总数变化曲线进行对比, 如图23 所示, 4 种场景下, 红方都是从51 s 开始击落蓝方无人机的, 即不同的战术不影响红方追击蓝方, 使其位于红方攻击半径内的时间. 进入攻击半径后, 蓝方采用集中逃逸的效果差, 且在这种情况下, 红方采用协同追击战术的击落数量更多. 蓝方采用自主逃逸时, 一半以上的无人机可以进行有效逃逸, 这种情况下, 由于蓝方无人机集群大概率发生分群现象, 所以红方采用分散追击的战术收益更高.
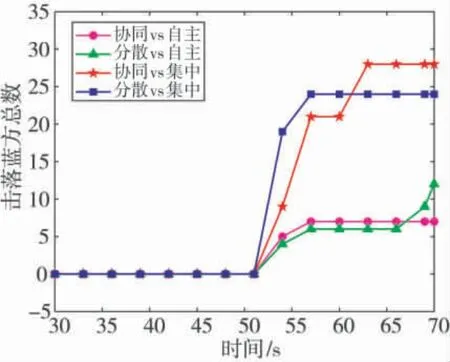
图23 4 种场景下红方击落蓝方总数变化对比曲线Fig.23 Comparison curves of the total number of the blue shot down by the red in four scenes
6 结论
1)本文通过对鹰群的追捕策略和欧椋鸟群的逃逸策略进行建模, 并将其分别映射到无人机集群追击战术和逃逸战术库的构建中, 利用改进社会力模型, 实现无人机集群追击、逃逸运动控制.
2)在4 种仿真场景下验证了所提战术的可行性和有效性, 并且分析了每种战术的优劣. 在设定的仿真场景中, 防守方选择自主逃逸战术的成功率高, 攻方选择协同攻击战术的收益大.
3)在进一步的研究工作中, 可以具体分析每种场景下, 攻方和防守方自身参数, 比如攻击半径、交互邻居数等对战术效果的影响, 对每种战术作出更全面的评价.
