面向CFRP损伤检测的改进L1正则化EIT方法
2022-02-16范文茹
范文茹, 王 驰
(中国民航大学 电子信息与自动化学院,天津 300300)
碳纤维复合材料(carbon fiber reinforced polymer,CFRP)因其较高的强度质量比,较强的耐腐蚀性、耐热性等优点被越来越多的应用于国防、航空航天、汽车等领域。在生产和使用中,各类损伤是不可避免的,因此对于CFRP的无损检测技术尤为重要。目前对CFRP检测主要包括超声[1-2]、声发射[3-4]、热成像[5-6]、X射线[7-8]等手段。上述CFRP检测方法虽然有一定的效果,但是也面临着设备昂贵、需要大量人力、操作复杂和辐射等问题。电阻抗层析成像技术(electrical impedance tomography,EIT)因其低成本、操作简单、无辐射等优点近年来在CFRP损伤检测方面被广泛研究[9-15]。Schueler等[16]改进了传统EIT方法来适应CFRP电导率的各向异性特征,利用布置在边界的16电极来提取电压数据,并通过有无损伤时的观测数据的对比来表征损伤,能够粗略的反映损伤的位置。Almuhammadi等[17-19]利用激光去除CFRP表面绝缘层,减小了电极与内部纤维之间的接触阻抗,利用布置在表面的16电极阵列研究了电极接触阻抗的各向异性行为,并且使用此电极进行准静态压痕试验检测到了较为细微的损伤。这种方法虽然有较好的效果,但制备过程复杂。Nonn等[20]通过在CFRP四周嵌入16颗铝制铆钉,利用碳纤维作为内部传感器来获取边缘电压数据,成功重建了损伤图像,并能够通过图像大致判断损伤位置。因其制备简单,能够获取相对较好的观测数据,并且在实际使用中可以利用固定CFRP的铆钉充当电极,故而本文中也将采用嵌入式电极作为传感器。
EIT对CFRP损伤图像重建包括正问题与逆问题两个方面,求解正问题是为了获得在已知电导率分布时的灵敏度矩阵,而逆问题的求解则是通过灵敏度矩阵、边界电压观测数据来反演场域内的电导率分布。正则化方法因其能够在一定程度上缓解求解方程的病态性而广泛的应用于EIT逆问题图像重建中。常用的正则化方法包括以Tikhonov正则化(Tikh)为代表的二范数方法,一范数方法L1正则化等。受限于电极个数与分布位置,采用嵌入式电极检测CFRP损伤时,灵敏度矩阵呈中间低四周高的分布特点。因此,四周的检测噪声可能被放大,而中间的有效信号可能被忽略。为解决这一问题,本文提出了一种改进L1正则化方法ML1尽可能多的保留有效信息,并采用能够节约大量计算的自适应Barzilai-Borwein谱估计(Adaptive Barzilai-Borwein,ABB)方法[21]计算迭代步长。为验证所提出的方法有效性,设计了多种损伤类型及损伤分布相对位置及实际损伤检测试验。仿真和试验结果验证了所提出方法的有效性。
1 EIT原理
EIT方法包括正问题与逆问题两个方面。正问题是通过给定测试区域几何形状、边界条件及电导率分布来获取被测场域的电场分布。EIT正问题的有限元模型可以描述为
U=F(σ;I)=R(σ)I
(1)
式中:F(σ;I)为通过电导率向量σ与激励电流I来观测电压向量U的正问题模型;R(σ)为通过电导率向量获得阻抗向量σ的非线性模型。当电导率变化较小的时候可以认为这一问题是线性的,于是
δF=F′(σ0)δσ=Sδσ
(2)
式中:δσ∈Rn×1为重建电导率变化量;δF∈Rm×1为观测到的边界电压差值;S∈Rm×n为灵敏度矩阵。在四端口网络中,灵敏度矩阵可以表示为

(3)
式中,f(Id)与f(Im)分别为第d次和第m次激励时场域Ωk的电势分布。
EIT逆问题是通过逐步缩小计算得到的与实际观测到的边界电压信号的差值来逼近的,由于电极个数,电极分布位置及系统方程欠定的限制,EIT图像重建问题是一个病态问题。由于正则化方法在一定程度上能够缓解病态问题,正则化方法广泛应用于EIT图像重建中。常用正则化方法可以表述为

式中,δσ*为电导率变化量的先验猜想,未知时设置为零向量。当p=1时为L1正则化,L1正则化相对于二范数正则化有更锐利的边缘和更少的伪影而被广泛应用。
2 改进L1正则化方法
虽然L1正则化方法有诸多优点,但是由于电极分布位置及电场软场特性的限制,CFRP采用嵌入式电极检测时灵敏度矩阵呈中心低四周高的分布。在L1正则化迭代过程中,软阈值滤波可能会将位于中心的损伤数据滤除,因此若在滤除前判断该点数据是否为有效数据再进行滤波应会取得更好地图像重建效果。
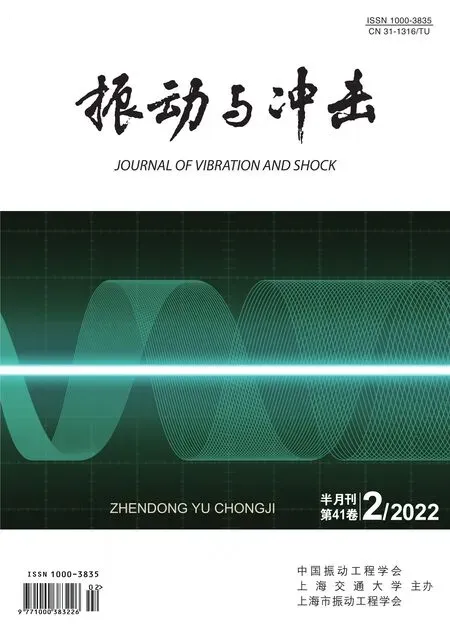
重建图像的伪影一般是随机分布的噪声没有规律,而L1正则化方法重建CFRP损伤图像数值分布,如图1所示,损伤中心像素点重建数值大于周围8邻域数值,即
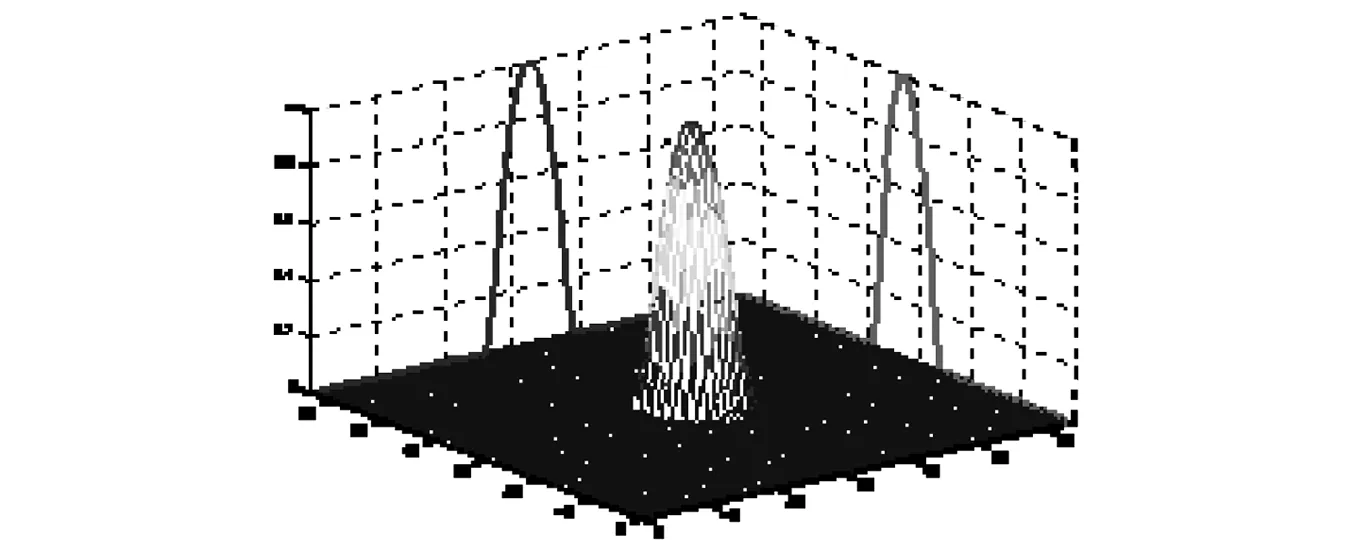
图1 损伤重建灰度值分布规律Fig.1 Distribution of damage reconstruction gray value
p(i,j)-p(i∪i±1;j∪j±1)>0
(5)
式中,p(i,j)为像素(i,j)处的重建电导率差值。式(5)在8个邻域上的阶跃响应之和N可以表示为

(6)
式中,H( )为单位阶跃函数。若N=8,则可以认为该点为有效数据,应在滤除时予以保留。为保证更多有效数据能够得以保留,当N≥7时,即认为该点为有效数据,对全部数据进行图2所示的扫描并将所有有效数据点及其八邻域数据保存至一全零向量k中。在滤波完成后将k回代入完成滤波的向量中进行下一次迭代。

图2 数据选择与判断方法原理图Fig.2 Principle of data selection and judgement
于是,δσ可以表示为
(8)
式中,δσi+1为第i+1次迭代的结果,迭代步长τ根据ABB方法设置
(9)

式中,δσi+1(t)为第i+1次迭代结果的第t个元素。
(11)
当残差满足式(12)或迭代次数达到最大迭代次数MI时,终止迭代并输出重建向量δσ。
(12)
式中,r为允许的最大误差。
于是,ML1正则化方法可以总结为图3中的流程。
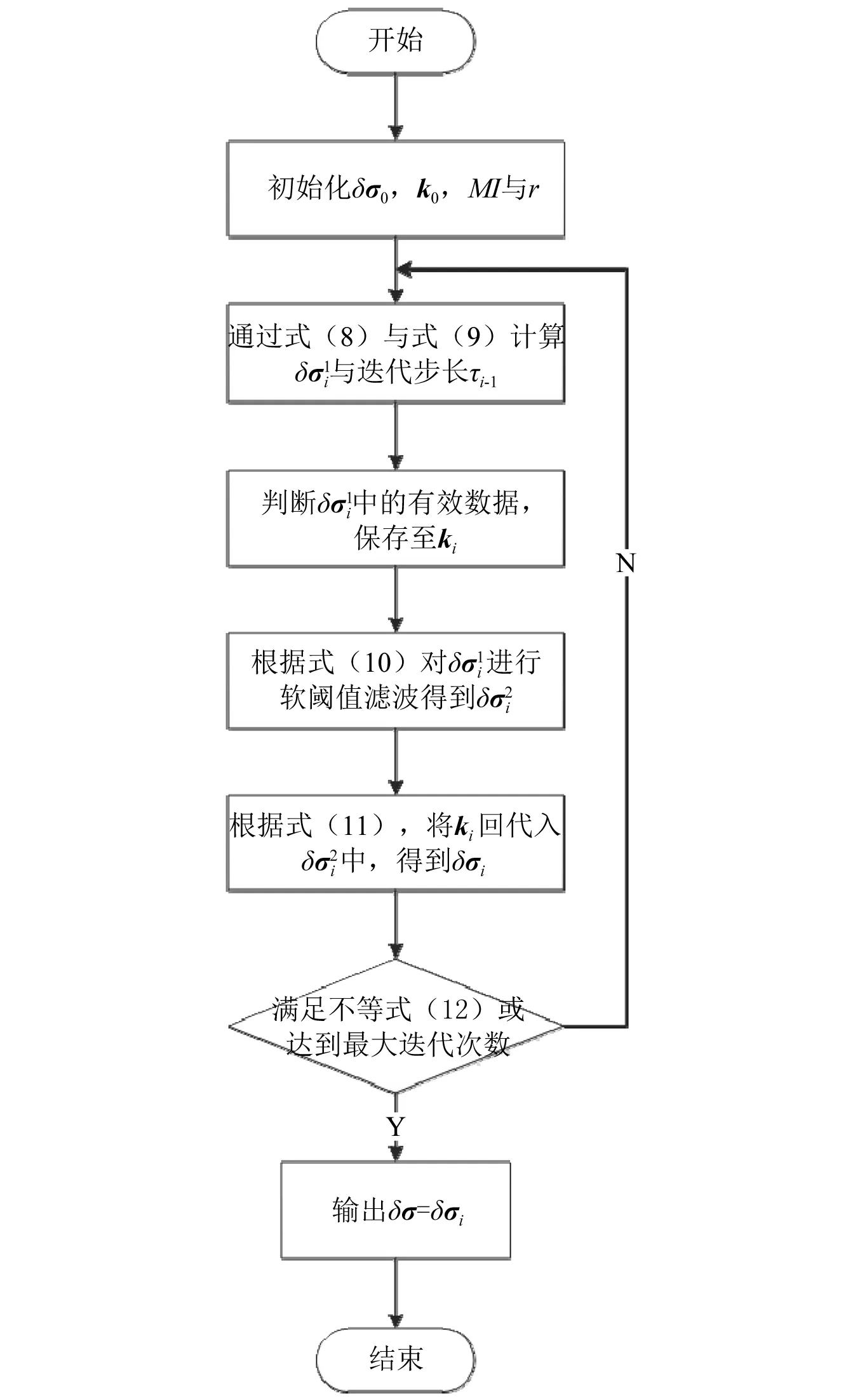
图3 改进L1迭代流程图Fig.3 The flowchart of the improved L1 regularization
3 仿真验证
3.1 仿真设置
树脂基CFRP材料由树脂与铺设方向不同的碳纤维构成。按照铺设方向区分,常见的树脂基CFRP材料可分为单向CFRP,[0°/90°] 交替铺设CFRP 以及[-45°/0°/45°/90°]交替铺设CFRP。在本文将与试验材料铺设相一致的[0°/90°]交替铺设 CFRP作为研究对象。由于碳纤维电导率在轴向与径向呈较强的各向异性,为了简化CFRP模型,CFRP材料被设置为10层单层均匀的各向异性材料,如图4所示。仿真所采用的CFRP材料尺寸为100 mm×100 mm×2 mm,纤维轴向电导率设置为1 000 S/m,径向介电常数设置为10 S/m。

图4 CFRP结构图Fig.4 Structure of CFRP
常见的CFRP材料损伤有冲击损伤,分层损伤,裂纹损伤等。此外,由于电极分布在CFRP材料四周,灵敏度矩阵呈中间低四周高的趋势,可能将较为靠近灵敏度较弱区域的损伤滤除。为验证本文所提出的方法,如图5(a)所示,设置了单冲击损伤D1、对角分布冲击损伤D2、多冲击损伤D3、位于同一直线双冲击损伤D4、十字冲击损伤D5、分层损伤D6及裂纹损伤D7。其中损伤D1的半径为5 mm,损伤D2两半径均为4 mm,损伤D3的半径分别为6 mm,5 mm,5 mm,4 mm,3 mm,损伤D4的两半径均为4 mm,损伤D5为两10 mm×60 mm的长方体。损伤D6为分层损伤,半径为5 mm,厚度为1 mm,发生在层3~8。损伤D7为裂纹损伤,尺寸为20 mm×1 mm×1 mm,发生在层6~10。
如图5(a)所示,采用嵌入式电极观测边界电压数据,电极材质为圆柱体铜制铆钉,半径为1.5 mm,高10 mm,均匀镶嵌在距CFRP边缘 5 mm的四周。图像重建区域如图5(b)所示,为一80 mm×80 mm方形区域。在正问题求解及逆问题计算时,该区域被均匀的剖分为32×32个均匀网格。仿真试验基于COMSOL Multiphysics 5.4及MATLAB 2014a。执行仿真计算的计算机CPU及内存容量分别为Intel(R) Xeon(R) CPU E3-1225 v5@3.30 GHz 与16 GB。为了对比改进方法的重建图像效果,常用的共轭梯度算法(conjugate gradient least squares,CGLS),Tikhonov算法(Tikh)以及改进前的L1正则化方法也将作为改进方法的对照组进行图像重建。

图5 仿真设置Fig.5 Setting of simulation
3.2 图像重建结果
仿真试验图像重建结果如图6所示。

图6 不同损伤在不同算法下仿真图像重建结果Fig.6 Image reconstruction under different damages and algorithms
为了定量评估重建图像与真实分布的相似程度,引入相关系数cc,cc可通过式(13)计算得到
(13)

受网格剖分限制,裂纹损伤由于宽度较小无法在剖分接点上表征出来。因此,仅对损伤D1~D6进行相关系数计算,各算法对于不同损伤重建结果如图7所示。对于冲击损伤D1~D5,Tikh、L1、ML1正则化参数与CGLS迭代次数根据经验选取,分别为5×10-3, 5×10-2,5×10-2与40次。对于分层损伤D6, Tikh与CGLS方法参数与冲击损伤相同,而L1与ML1正则化参数均设置为1×10-2。对于裂纹损伤D7,Tikh、L1、ML1正则化参数与CGLS迭代次数分别为5×10-2,3×10-2,3×10-2与15次。根据图6、图7可以看出稀疏正则化方法图像重建结果普遍优于Tikhonov正则化及CGLS方法。对于简单的单冲击损伤D1,对角分布的冲击损伤D2及分层损伤D6,各图像重建算法均能较为准确地反映出损伤的位置,并且稀疏正则化方法L1与ML1重建图像的大小接近真实损伤大小。对于十字冲击损伤D5,Tikhonov正则化方法、CGLS及L1正则化方法仅能大致重建损伤轮廓,而提出的ML1正则化方法能够准确地重建出损伤的位置、大小与轮廓。
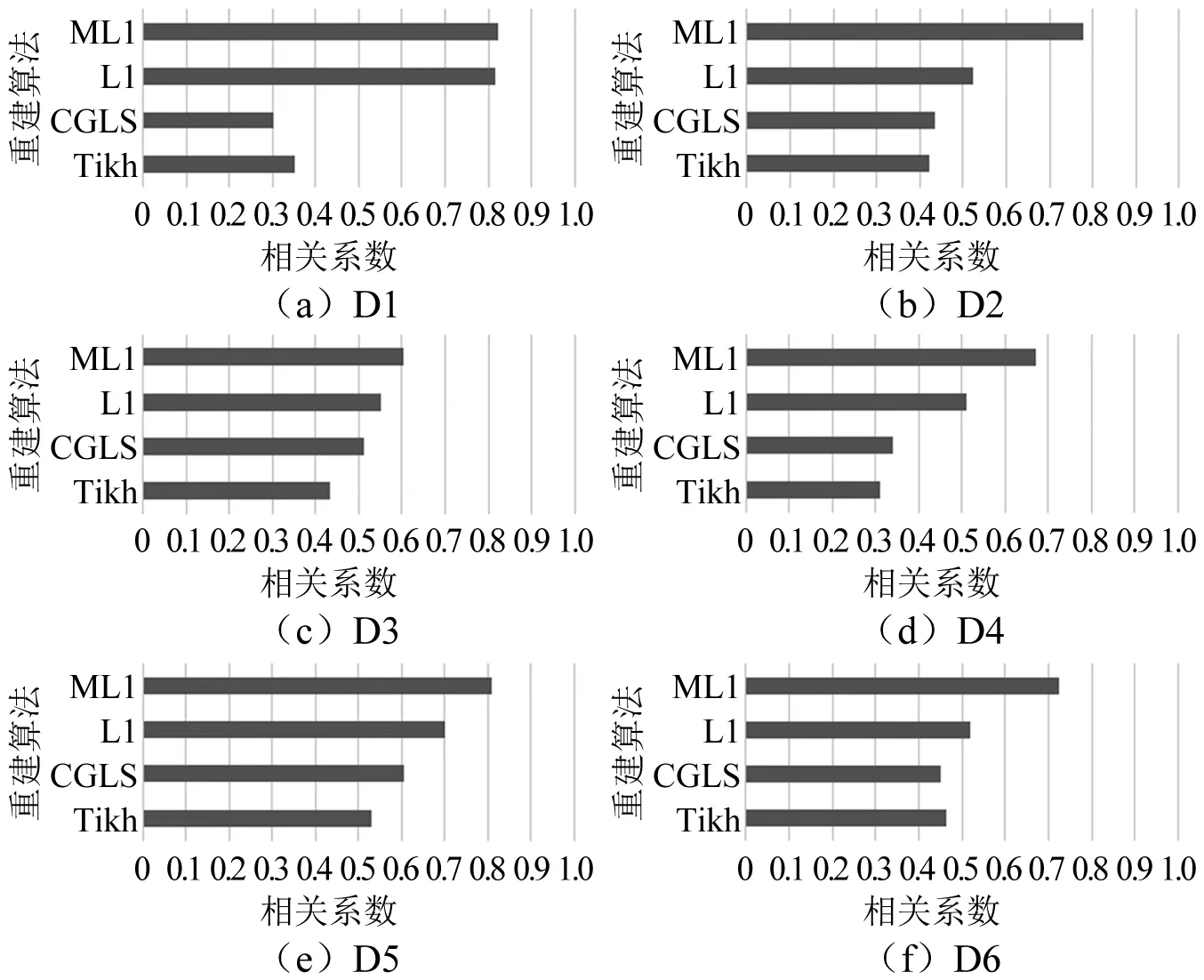
图7 不同损伤分布在不同算法下重建图像的相关系数Fig.7 Correlation coefficient of reconstructed image reconstruction under different damages and algorithms
由于CFRP材料的电导率的各向异性,损伤重建图像在水平和垂直方向的数量级不同,这一点在十字损伤表现尤为明显。对于较为复杂的多冲击损伤D3与位于同一直线双冲击损伤D4,由于既有损伤位于灵敏度较强的边缘区域又有损伤位于灵敏度较弱的中心区域,在Tikhonov正则化、CGLS方法进行图像重建时,中心区域的损伤与边缘伪影量级相当。而对于L1正则化方法,D3中心区域的损伤在迭代过程中被滤除,D4中心区域的损伤与边缘区域的损伤重建图像连接在一起,无法正确反应损伤的位置与大小。而所提出的ML1正则化方法通过判断将要滤除图像的特征,将有效数据保留,能够正确的表征损伤的位置和大小。对于裂纹损伤D7,受网格剖分的限制,重建图像中裂纹宽度的宽度较真实裂纹宽度大,重建长度与真实裂纹相当。就D7损伤成像效果来看,ML1正则化方法也略优于其他图像重建方法。
4 试验验证
为了验证仿真结果与所提出方法的实际有效性,采用实验室设备搭建16电极EIT测试系统进行CFRP损伤检测与图像重建。
4.1 试验设置
EIT测试系统原理及实测图如8所示,试验材料与仿真材料尺寸相同。激励源由电流源KEITHLEY 6221提供,选通与测量由34980A多功能开关测量单元执行。首先,待测CFRP材料与激励源6221由接线端子连接至34980A的电枢矩阵开关34932T。然后,上位机与34980A通过LAN口连接并且计算机通过LABVIEW编写的上位机程序实现激励测量通道的选通与数据的采集、上传。采用相邻激励相邻测量的激励测量模式,单次激励时可获得13个观测数据。因此,当完成全部激励测量时可获得208个观测数据。图9左侧第一列E1~E4为试验模型,其中E1~E3为贯穿的冲击损伤模型,E4为裂纹损伤模型,该模型损伤深度为1 mm,宽1 mm,长40 mm。
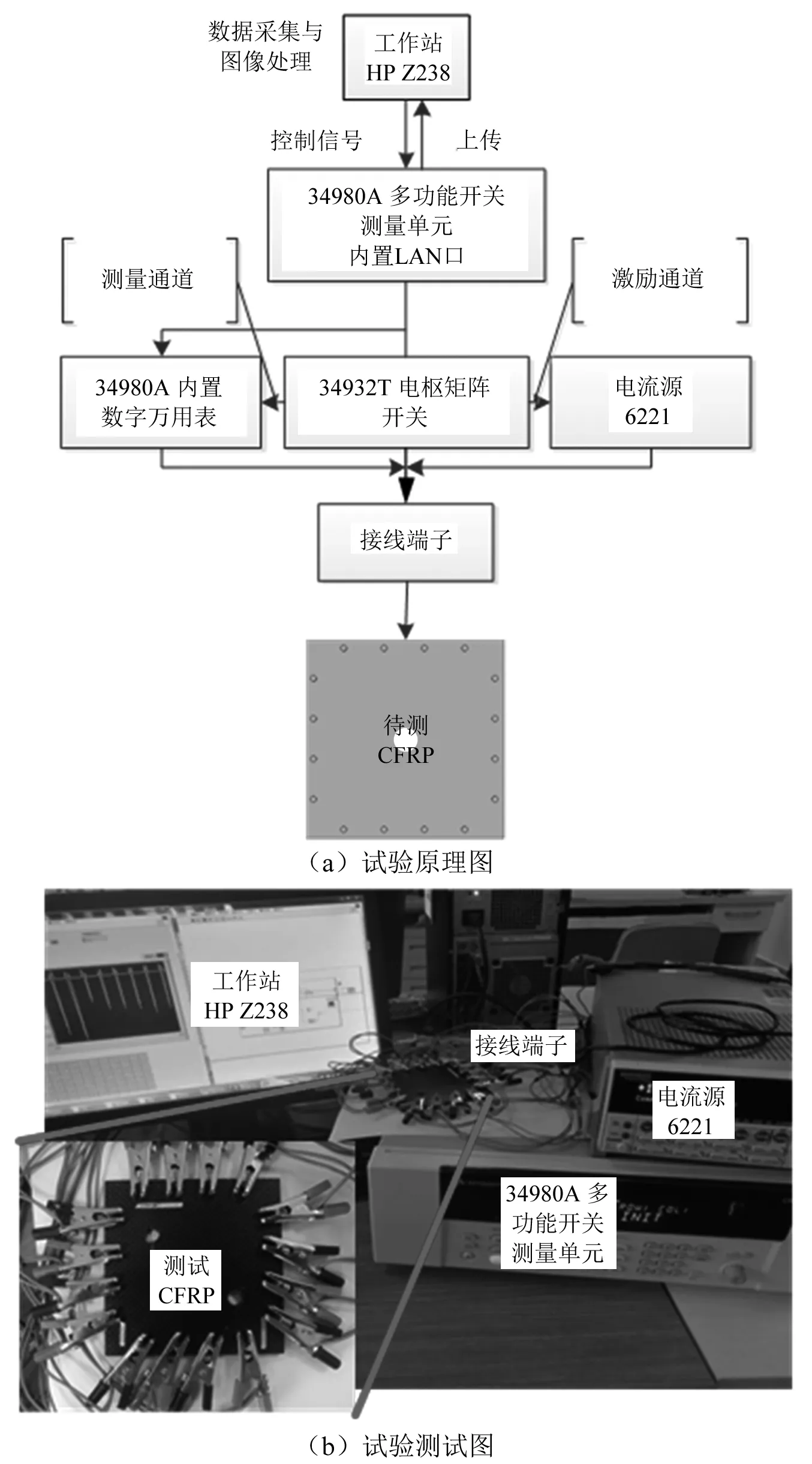
图8 试验原理图与实际操作图Fig.8 Experimental schematic diagram and practical operation diagram
4.2 试验结果
试验结果如图9所示,Tikh、L1与ML1方法的正则化参数分别设置为5×10-3,3×10-2与3×10-2,CGLS方法的迭代次数设置为40次。对于两冲击损伤样品E1、E2,CGLS与Tikhonov正则化方法能够大致确定损伤的位置,但同时存在较多的图像重建伪影。ML1与L1正则化方法优于CGLS与Tikhonov正则化方法,且ML1正则化方法重建图像面积与真实损伤更为接近。
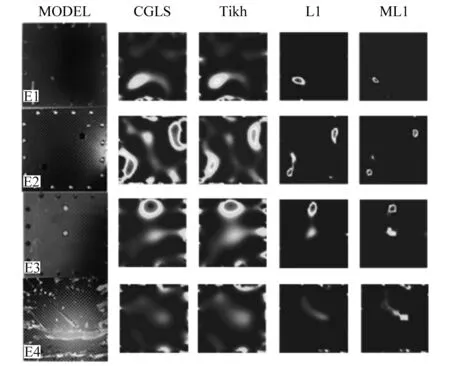
图9 损伤样品在不同图像重建算法下的图像重建结果Fig.9 Image reconstruction results of damaged samples under different image reconstruction algorithms
5 结 论
针对CFRP嵌入式电极EIT图像重建方法灵敏度矩阵分布不均匀导致稀疏方法在图像重建时可能无法正确反应灵敏度较弱区域损伤分布的问题,本文提出了一种结合损伤重建图像损伤区域8邻域分布特点的ML1正则化方法。仿真和试验结果表明,该方法不仅具有稀疏的图像重建效果,而且能够有效地改善灵敏度较弱区域的损伤情况。但是由于在迭代过程中仅通过8邻域梯度来判断数据有效性导致图像重建结果偏向于方形。在后续的研究中,周围更多的像素点将会被考虑来改善这一问题。此外,本研究方法也可用于系数重建方法在其他灵敏度不均匀的重建图像质量改善中。