民用飞机高度控制系统MBSE建模方法
2022-02-16范秋岑毕文豪王文浩
范秋岑, 毕文豪, 张 安, 王文浩
(西北工业大学航空学院, 陕西 西安 710072)
0 引 言
飞机设计是一项既复杂、周期又长的工作,传统的民机高度控制系统设计是基于文本的系统工程,设计过程中的需求与交互信息通过自然语言的方式进行记录和变更。这种方法具有很大缺陷:民用飞机控制系统作为复杂系统,很难被自然语言全面详尽地描述出来,文字描述不够直观;文档之间不易追溯,各方沟通时需要依赖不断更新的术语、词汇表,不易对高度控制系统进行形象化表达和一致性理解。在设计过程中,经常会出现设计信息缺乏一致性、版本错乱、可读性差等问题,导致设计成本的增加乃至重大安全隐患,因此亟需一种新的设计方法。
基于模型的系统工程(model-based systems engineering,MBSE)方法是指通过形式化的建模语言描述系统的结构、行为、参数,以模型驱动的形式结合现代设计方法进行系统综合设计,并贯穿整个设计周期的设计方法。MBSE方法基于模型驱动的思想进行系统综合设计,其重点是在不同的场景条件下进行功能分析,采用模型形式来描述、分析和检验飞机及其系统在各种飞行任务或运行场景下的活动内容、状态特性、交互信息,并生成与之匹配的功能需求、功能接口、测试场景和逻辑架构的过程。其结构化、模型化的系统需求、功能与架构的定义、分配与追溯链接关系能够快速响应需求的变化,并及时指导后期的设计、实现、综合和验证过程,促进了系统工程项目中的一致性、沟通性、清晰性和可维护性,并解决了与成本、复杂性和安全性相关的问题。
目前,MBSE方法的关注度正在不断上升,已经被国内外广泛应用于航空、航天、车辆工程等领域内复杂系统的设计研发工作当中,并且已经取得较好的实际应用效果。同时,为了更好支持MBSE建模方法,国际系统工程协会(international council of systems engineering, INCOSE)和对象管理组织(object management group, OMG)联合开发了系统建模语言(systems modeling language, SysML),是一种统一的、可扩展的、易于理解的系统工程通用建模语言,用于指定、分析、设计和验证复杂系统,这些系统可能包括硬件、软件、信息、人员、程序和设施,是MBSE的重要工具。SysML提供了系统需求、行为、结构和参数图形化建模的语义基础,并且能够与其他工程分析模型集成。
本文参考美国国防部体系结构框架(department of defense architecture framework, DoDAF),基于MBSE设计方法和思路进行民用飞机高度控制系统设计方法的研究,并以高度控制系统的设计为例,进行MBSE建模过程的示范和高度控制系统SysML模型示例。
1 基于DoDAF的MBSE建模方法架构设计
民机高度控制系统的MBSE建模架构能够将高度控制系统的目的、边界、交互、活动执行、接口等系统信息与结构用各种模型进行详细描述,可以更直观、准确地反映高度控制系统需求与功能,降低描述的二义性,同时充分发挥计算机技术的优势,有助于系统、全面地构建模型。
为了对复杂系统进行更全面、细致、一致的描述,在建模中基于DoDAF V2.0,从数据、模型和视图3方面对系统进行描述,从不同的角度对复杂系统结构数据进行了逻辑分组,各视图下的模型互为补充,在逻辑上具备一致性和完备性,契合复杂系统设计理念,能够最大程度地完整描述复杂的、多层次的系统结构。
针对现有建模方法难以全面描述复杂系统、建模语义二义性强、设计文档变更难度大等问题,本文基于DoDAF,提出了如图1所示的基于DoDAF的MBSE建模架构。从多种视图对民用飞机高度控制系统进行描述,将设计过程分为现实系统和设计逻辑两个维度,其中,现实系统维度包含了需求、行为、结构和参数4个层级,设计逻辑维度包含抽象概念(黑盒视图)、问题描述(灰盒视图)和解决方案(白盒视图)3个层级。
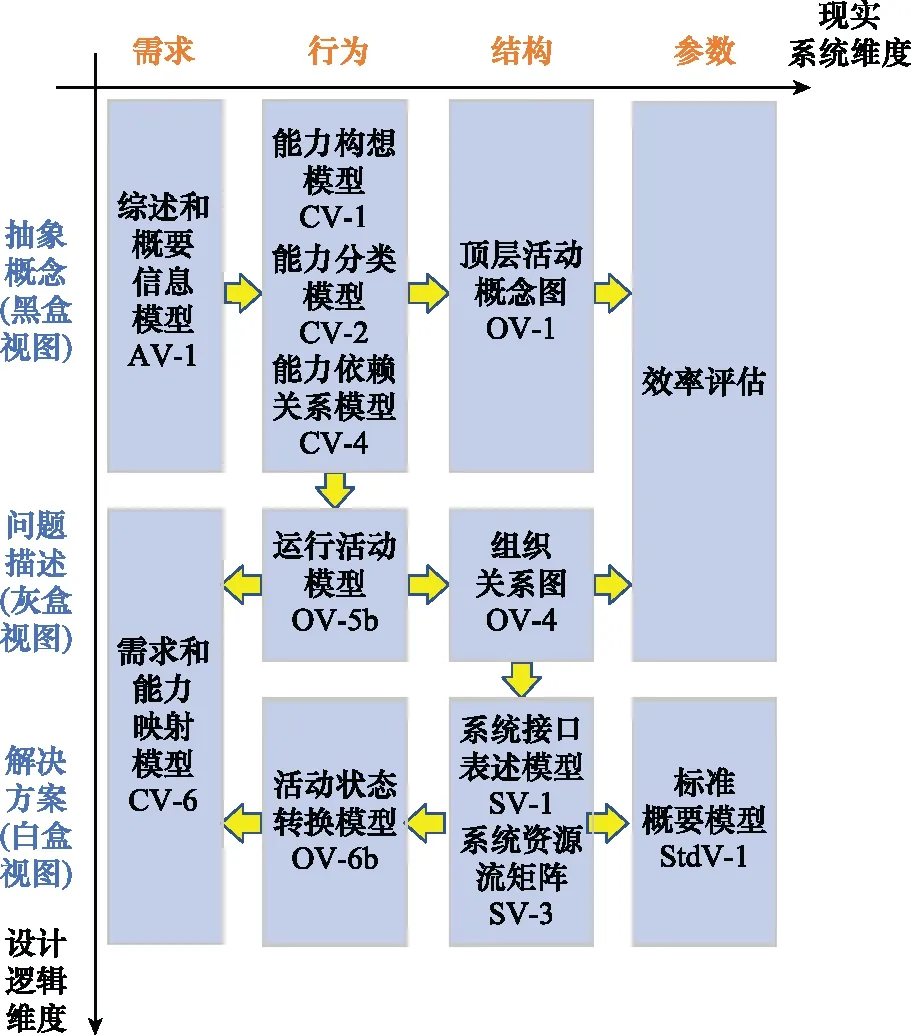
图1 基于DoDAF的MBSE建模架构Fig.1 MBSE modeling architecture based on DoDAF
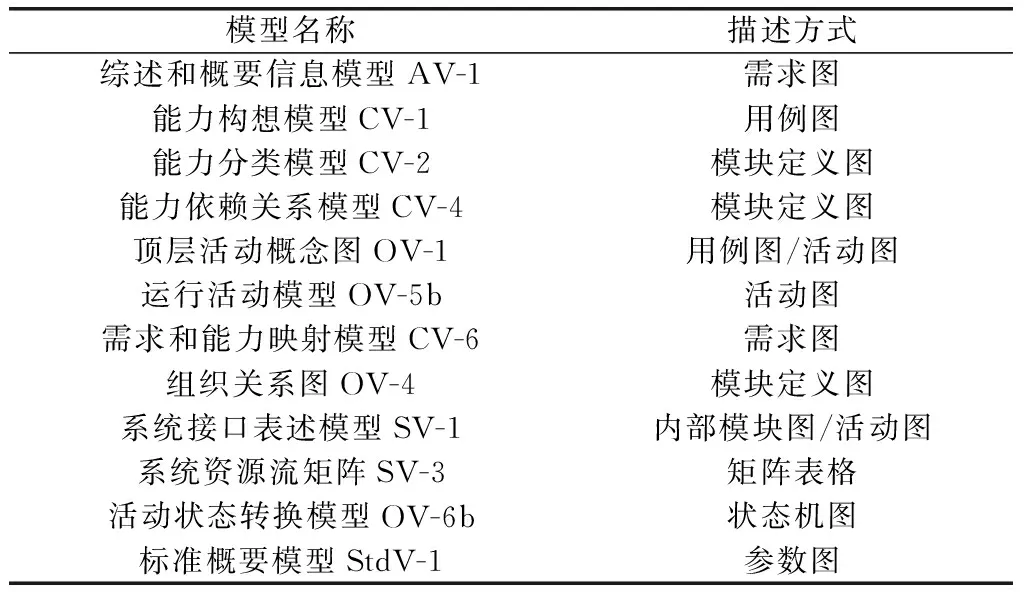
表1 各SysML模型描述方式
2 基于DoDAF的MBSE建模方法流程
为了进一步明确建模方法的建模工作流,绘制了如图2所示的基于DoDAF的MBSE建模方法流程,以活动图的形式对建模流程作了更为详细的阐述,用以明确使用该建模方法进行复杂系统建模时的主要建模内容以及建模关键。
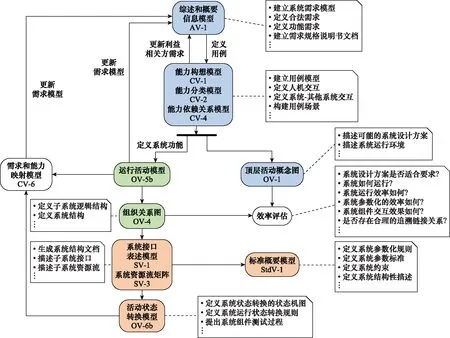
图2 基于DoDAF的MBSE建模流程Fig.2 MBSE modeling process based on DoDAF
首先,建立全景视图的综述和概要信息模型AV-1,对民用飞机高度控制系统的构想、目的、规划、活动、事件、条件、度量、效果等进行汇总,建立系统需求概要信息包模型,系统需求概要信息包模型中每个包视为高度控制系统的一个层面的信息集合,在各个包中创建SysML语言定义的需求图,在需求图中描述系统整体层面下的构想与期望,作为系统研制初期的设计方向指引与修改预案。
通过建立的全景视图模型,选取不同飞行场景并对用例进行定义,采用基于场景的用例分析方法,导出用例功能流。通过分析生成或更新系统需求,并与高度控制系统用例相关联,以用例图的形式描述能力构想模型CV-1,描述高度控制系统的期望执行功能;根据用例功能流划分系统能力归属和逻辑关系,用模块定义图建立能力分类模型CV-2和能力依赖关系模型CV-4。在CV-2中首先明确高度控制系统对应的系统运行能力,描述能力构想模型CV-1中定义的系统能力的子能力,子能力的撰写依据为综述和概要信息模型AV-1中包模型中所定义的利益相关方需求与从设计角度出发而提出的非功能性要求;在CV-4中基于CV-2撰写出系统子能力之间的关联关系,如依赖、改善、包含等。
根据能力构想模型CV-1和导出的用例功能流,构建顶层活动概念图OV-1,包括高度控制系统的任务、功能活动流与运行场景,在OV-1视图中引用CV-1中建立的反映不同运行状态的用例场景,绘制用例图/活动图以描述高度控制系统应适用的不同场景与状态与其下的系统预期可执行的不同功能活动流。
从能力视图CV出发,定义系统功能,以活动图的形式建立运行活动分解树OV-5a,活动图中以活动或动作为单元,定义功能执行过程中的各个功能活动或动作,同时可以建立组织关系图OV-4,在子系统之间建立依赖或关联的链接关系,完成子系统间的逻辑关系梳理。
在分别完成“抽象概念”和“问题描述”两个设计逻辑层的模型建立之后,可以对建模流程进行效率评估(measurements of system effectiveness, MOE),以决定在设计过程中出现的最佳选择。
基于建立的组织关系图OV-4,分别以内部模块图和矩阵表格的形式建立系统接口表述模型SV-1和系统资源流矩阵SV-3,描述各子系统之间的接口类型和资源流交换情况,实现向解决方案层次的转变。
在建立了系统接口表述模型SV-1和系统资源流矩阵SV-3之后,可根据此用状态机图建立活动状态转换模型OV-6b,用于描述基于高度控制系统的不同运行状态,反映高度控制系统的所有情形下的功能活动流程与时序;以状态机反映高度控制系统的运行状态,以转变连接器及转变连接器的属性(触发、监视、影响)建立不同运行状态之间的转换关系,同时反映状态转换过程中的消息流。
根据系统接口表述模型SV-1和系统资源流矩阵SV-3也可建立参数层的标准概要模型StdV-1,以参数图的形式描述系统在实际物理建模过程中可能涉及的参数数据类型、约束等限制条件。
由“问题描述”和“解决方案”层导出的需求和能力映射模型CV-6将以需求图的形式向上层回溯,包含在系统建模灰盒和白盒视图阶段生成的更为细化的需求更新文档,以更新需求模型,并指导下一次的迭代。
自此,完成了系统工程V模型“需求分析-概要设计-详细设计”的流程,符合系统工程的基本原理,采用层层递进的设计方式,并且在建模过程中建立了规范性文档和追溯链接关系,能够很好地指导民用飞机高度控制系统这类复杂系统的建模设计工作。
3 民用飞机高度控制系统建模实例
根据上述建模方法,下面将以民用飞机高度控制系统为例进行MBSE建模方法的示范并基于SySML建模语言建立民用飞机高度控制系统模型实例,明确相关模型视图之间的逻辑关系。
综述和概要信息模型AV-1以需求图的形式进行描述,通过识别民机运行场景下的工作流,捕获民机高度控制系统的利益相关方需求,如图3所示。
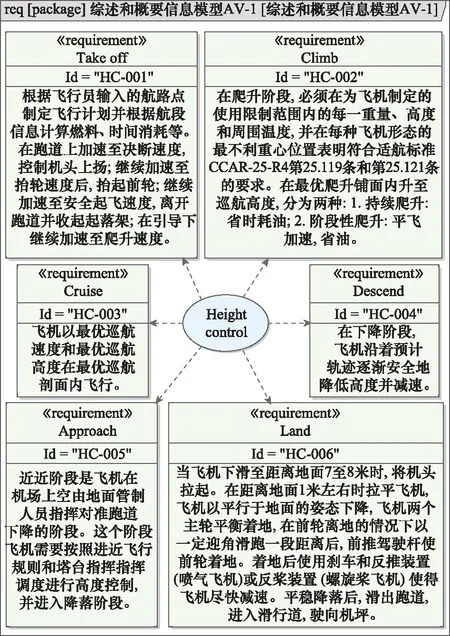
图3 综述和概要信息模型AV-1Fig.3 Overview and summary information model AV-1
根据综述和概要信息模型AV-1,将利益相关方需求和用例关联起来,用图4的形式描述能力构想模型CV-1,

图4 能力构想模型CV-1Fig.4 Capability vision model CV-1
对于高度控制系统,有驾驶员和自动驾驶仪两个执行者,主要用例可以对应到民机运行的6个主要运行场景。在实际建模过程中,对于不同场景,应建立若干用例与之相关联。
根据能力构想模型CV-1扩展出每一项的能力需求,分解可得到如图5所示的能力分类模型CV-2。分解得到与高度控制系统相关的能力主要有高度控制、速度控制、飞行姿态控制等,下一级子能力主要有升降舵控制、副翼控制、加减速控制等。
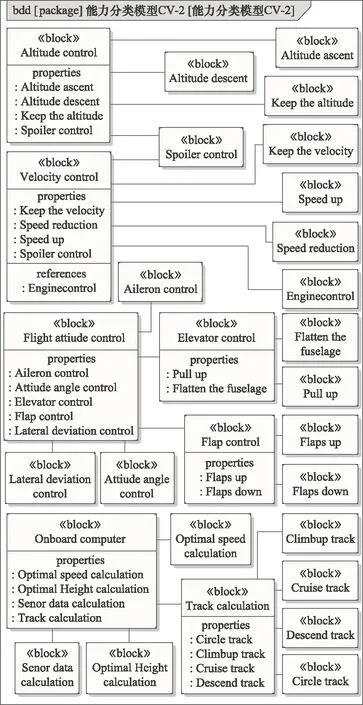
图5 能力分类模型CV-2Fig.5 Capability taxonomy model CV-2
梳理能力分类模型CV-2,得到能力依赖关系模型CV-4。如图6所示,高度保持、扰流板控制、高度增加和高度降低均属于高度控制的子功能。各子功能之间也存在交互关系,如高度增加依赖于爬升功能,而爬升功能又驱动襟翼收起功能的实现。
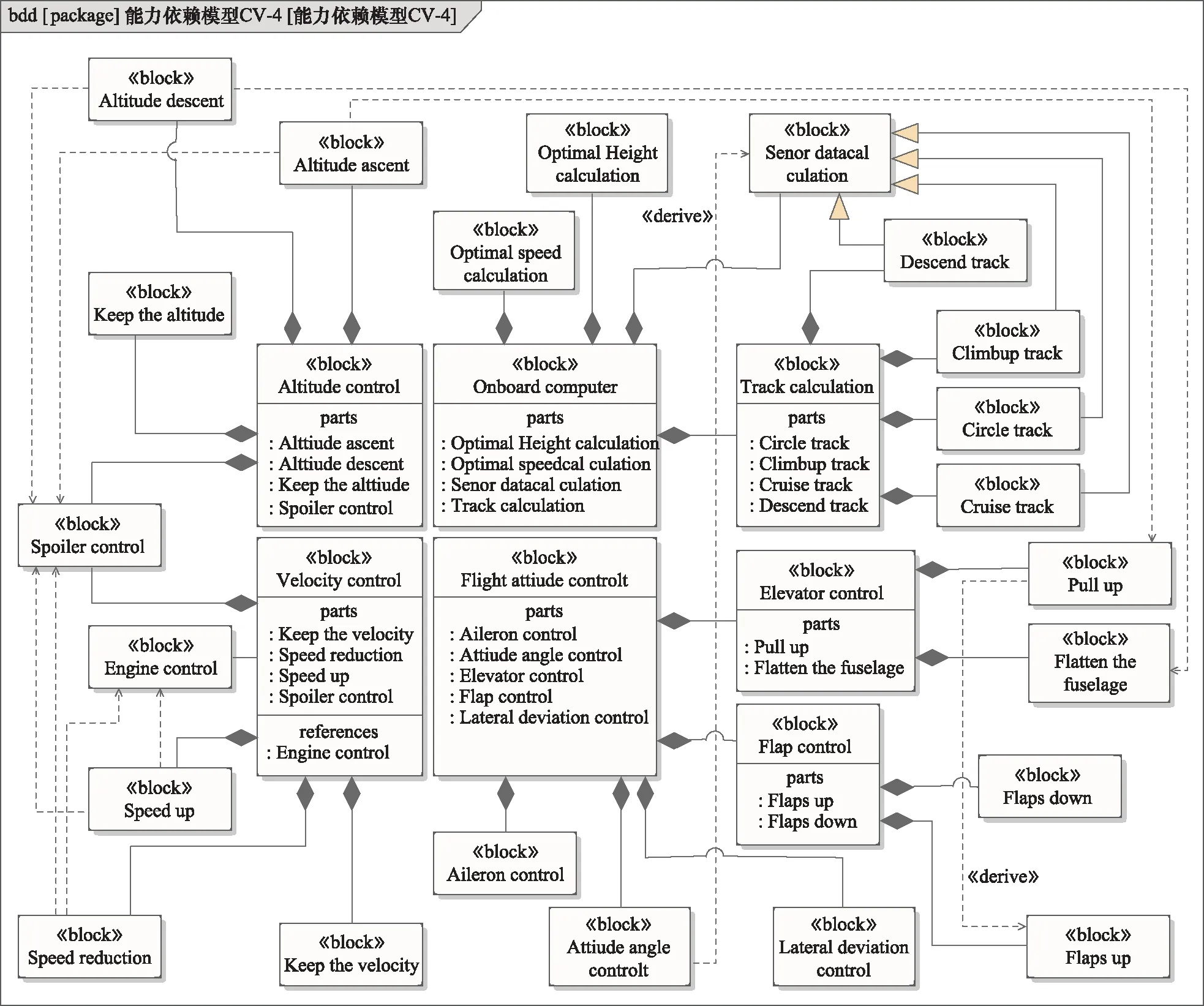
图6 能力依赖关系模型CV-4Fig.6 Capability dependencies relationship model CV-4
高度控制属于飞机的重心控制,通常在飞机的远距离巡航阶段需要保持其高度稳定。理论上可采用控制升降舵或者发动机推力的方法来控制飞机的飞行高度,但是控制发动机推力上实际是通过控制速度来控制高度,属于间接控制,效果比较微弱,而且速度控制是另一项主要能力,所以这一部分完全采用升降舵控制来保持高度稳定。通过操纵升降舵控制飞行高度的高度稳定系统以俯仰角控制系统为内回路,由高度传感器测量高度偏差信号并输入到俯仰角控制系统,从而改变飞机的航迹倾斜角,使飞机回到预定高度。高度控制的顶层活动概念图OV-1如图7所示。接下来给出高度控制的活动视图建模描述,通过定义高度控制中的各项活动,梳理其控制流顺序或信息传递顺序建立了运行活动模型OV-5b,如图8所示。同时进行了泳道划分,明确了各个节点的活动以及节点之间的联系,便于之后的系统接口定义。为了实现运行视图中的这些抽象活动,需要将这些活动分配到具体的系统当中,用系统功能活动代替操作活动,明确各个活动之间的数据流,将其进行归纳可以得到系统接口表述模型SV-1,如图9所示。
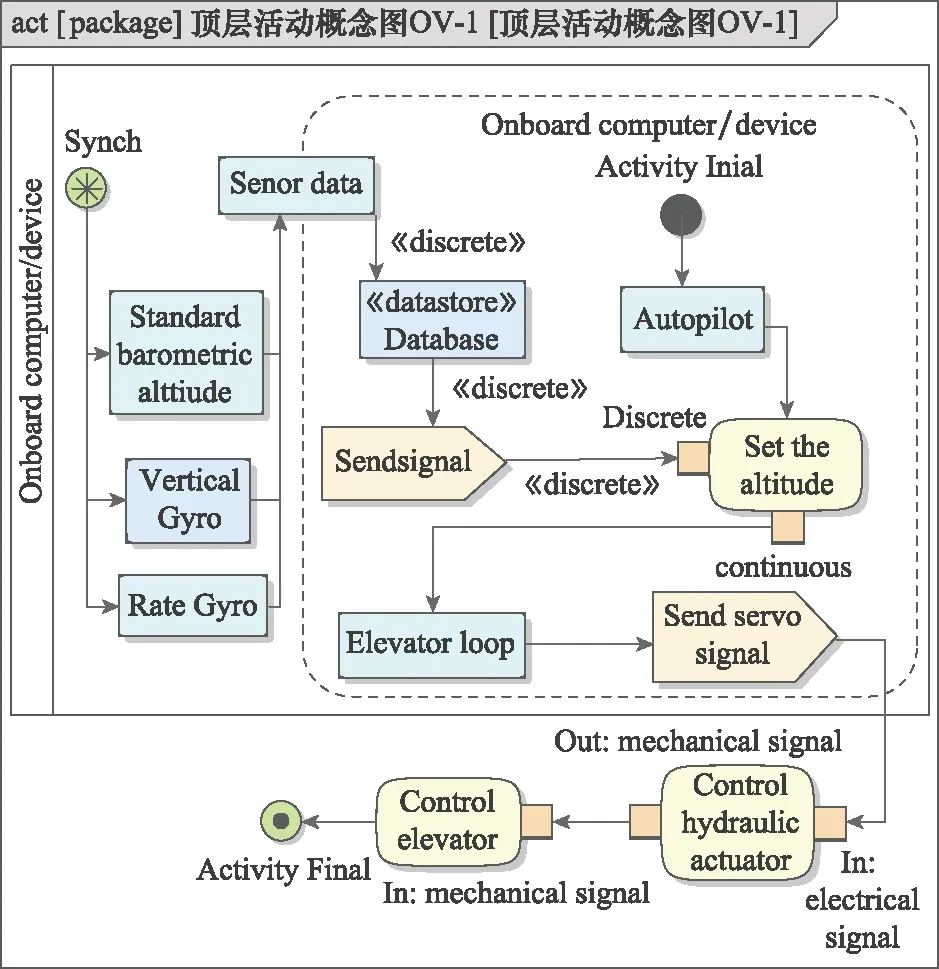
图7 顶层活动概念图OV-1Fig.7 High level operational concept graphic OV-1
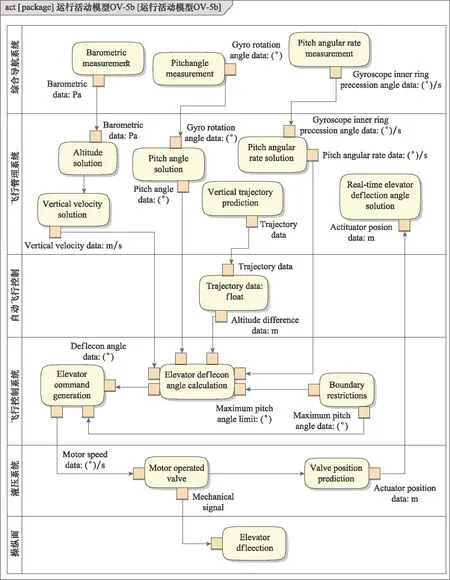
图8 运行活动模型OV-5bFig.8 Operational activity model OV-5b
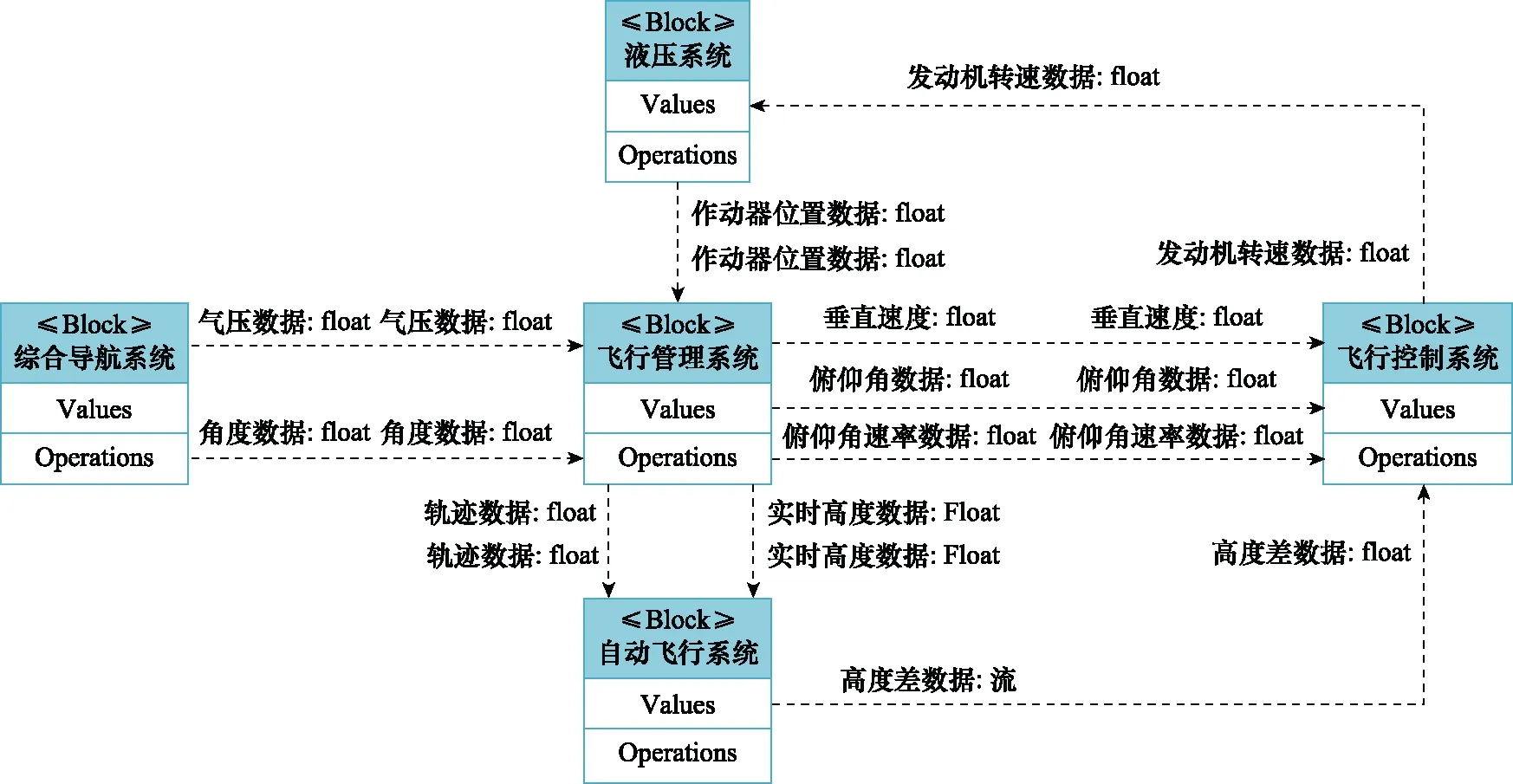
图9 接口表述模型SV-1Fig.9 Interface description model SV-1
至此,基于MBSE建模方法的飞机高度控制系统的主要视图建模已经基本完成,得到了能力构想模型、活动模型以及系统接口模型等,用于支持高度控制系统的详细设计。由于本文篇幅有限,并未给出全面的模型视图,在实际设计中需要对所有子系统,按照建模方法中规范化的建模流程对所有涉及的功能进行建模,并将其整合成一个完整的飞机系统级模型库,这些模型还可用于其他相似系统的建模工作当中。
4 结 论
本文针对民用飞机高度控制系统在传统研制过程中出现的自然语言理解二义性、需求和功能之间追溯关系不明确等一系列问题,提出了基于DoDAF的MBSE建模方法。该方法使用SysML建立模型,以模型的方式传递可视化、可追溯、易理解的工程信息,通过DoDAF的多视图对飞机能力要求进行分析与细化,逐步递推,最终得到各个子系统的系统视图,能够更加准确细致地描述飞机研制要求。该建模方法提出的现实系统维度和设计逻辑维度,深入剖析了在设计过程中存在的从需求到行为,再到结构和参数的现实关系,并且将设计由黑盒逐渐解白的过程很好地体现了出来,并且在设计逻辑层的每一层都能够将设计过程中生成的文件信息向上回溯,不断更新先前建立的模型文件并指导下一轮迭代。该建模方法建立的模型之间还建立了对不同层级的能力之间的可追溯性链接,使得每一条研制要求都与初始能力要求相对应,保证了设计与需求的一致性。同时建模流程的规范化,为研究人员提供了思路清晰的研制流程,减少了研制过程中由于经验不足而产生的重复工作。
本文采用该建模方法针对高度控制系统建立模型,详细给出该系统的各阶段模型的数据接口信息与资源流信息。在实践过程中该方法体现出诸多优点:
(1) 将设计过程划分为现实系统层和设计逻辑层两个维度,共计10个设计流程模块,对复杂系统设计流程更为清晰,降低了研制的复杂程度;
(2) 借助DoDAF和SysML,从多个角度,以不同于传统自然语言的图形化建模语言建立模型,提高了模型的可理解性,便于开发者和利益相关方之间的信息交流;
(3) 通过该方法建立的模型具有可重用性,可方便后续类似设计的需求文档的开发,并且模型的一致性和完整性保证了需求文档的一致性和完整性。
因此,本文提出的基于DoDAF的MBSE建模方法相较于传统基于文档的系统工程建模方法有明显优势,在高度控制系统建模实例中初步显现。该建模方法能够很好地契合未来复杂系统设计要求,适合民机系统的研制,具有大好的发展前景。
