基于性能诊断的预测控制器参数整定策略
2022-02-15龚正锋李丽娟
龚正锋,李丽娟
(南京工业大学 电气工程与控制科学学院,江苏 南京 211816)
0 引 言
模型预测控制(model predictive control,MPC)是在过程控制领域得到大量推广应用的控制策略,一直被高度关注和广泛研究[1]。预测控制系统投运后一定时期内由于设备老化、催化剂失活等问题都会出现控制性能衰减。控制器参数整定是控制器性能衰减的主要解决方法,控制器参数对闭环性能有重要影响。学者们通过对参数之间的关系,参数对系统性能的影响,参数整定的准则、方法等方面的分析,逐步推动了参数整定研究的进展。现有的关于控制器参数整定方法超过200种[2]。谷泽坤等、丁宝苍等[3-7]给出了一些控制器参数整定的方法与原则。这些研究方法和原则均是针对离线参数整定,它的优势在于提高了系统在投运初期的控制性能,参数整定的效率大大提高,但是在系统投运后,若存在自身变化以及环境等问题的影响,原本的控制器参数将会导致系统闭环性能衰减。
针对上述控制器参数整定文献存在的问题,本文提出一种针对恶化源的控制器参数整定方法,通过推导分析系统的最优控制律,引出与其相关的各项系统性能并给出对应的性能诊断指标,构造各项性能指标对应的控制器参数整定的目标优化函数。通过评估结果判断出恶化源,选择对应的目标函数,用粒子群算法实现控制器参数整定。为了防止算法陷入局部最优以及实现控制器参数中整型参数P、M的整定,本文改进了算法中的惯性因子和位置参数。构造的目标函数和改进的粒子群算法实现了在得到性能诊断结果后针对恶化源的控制器参数整定。
1 最优控制律与三项系统性能相关性分析
多变量模型预测控制是一种优化策略算法,原理如图1所示。
算法通过优化指标确定未来的控制增量,使预测输出接近期望值。优化性能指标为[8]

(1)

针对图1所示的无约束动态矩阵控制系统,假设其为一个包含p个被控输出,m个控制输入,预测时域为P, 控制时域为M的多变量过程,式(1)可写为如下矩阵形式
J(k)=(GΔuM(k)+s(k)-r(k))TQ(GΔuM(k)+s(k)-r(k))+ΔuM(k)TRΔuM(k)
(2)
式中:G为预测模型,s(k)=y0(k)+He(k), 由∂J(k)/∂ΔuM(k)=0可得
ΔuM(k)=(GTQG+R)-1GTQ(r(k)-s(k))
(3)
令dT=L(GTQG+R)-1GTQ, 其中L表示取后面矩阵的第1、第M+1、 …、 第 (m-1)M+1行
则k时刻的最优控制律可表示为
Δu(k)=dT[r(k)-y0(k)-He(k)]
(4)
式中:y0(k) 为与过去时刻相关的预测输出分量,H为反馈系数矩阵。
由图1可知
e(k)=y(k)-ym(k)=G0(q)u(k-1)+d0(k)-Gm(q)u(k-1)
(5)
将式(5)代入式(4)可得
Δu(k)=dT[r(k)-y0(k)]-dTH[G0(q)-Gm(q)]u(k-1)-dTHd0(k)
(6)
其中,G0(q) 与Gm(q) 分别表示实际过程对象模型和预测控制模型,u(k-1) 为k-1时刻系统控制输入,d0(k) 为干扰量。
在式(6)中,最优控制律Δu(k) 由3项组成,第一项可以实现设定值变化时的目标跟踪;第二项dTH[G0(q)-Gm(q)]u(k-1) 是与预测模型相关的项,可以平衡预测误差,在预测模型匹配的情况下为0;第三项dTHd0(k) 是与扰动量相关的项,可以抵消扰动。3项中,仅有控制器参数dT、H为可调项,因此,当3项中任意一项出现变化,而dT、H不做调整,都将直接影响最优控制律Δu(k), 从而导致系统性能下降。如果能够检测到3项的变化并适时调整控制器参数,则控制系统可以保持良好的性能。
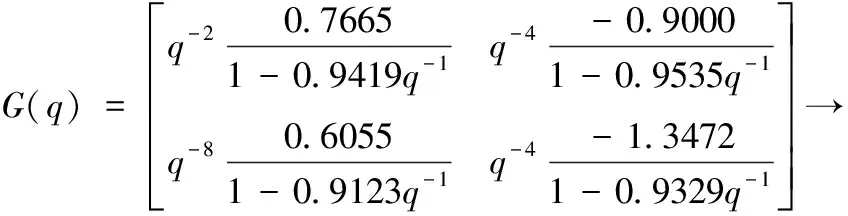
本文中,用动态矩阵A代表预测模型G做预测输出计算,其表现形式如下
其中,aij表示单位阶跃响应系数,反馈系数矩阵H以及控制器参数dT中各参数的具体表现形式如下
在实际应用过程中,一般取权系数qi(1)=qi(2)=…qi(P),rj(1)=rj(2)=…rj(M)。 由于p和m为系统固定不可调参数,因此,针对dT和H的参数整定可认为是针对可调参数P,M,Q,R,H的参数整定。
2 系统性能诊断指标选取以及控制器参数整定目标函数构造
2.1 以控制系统跟踪性能为目标的控制器参数整定
在以往的系统性能评估描述中,通常以正常历史数据计算的基准值与系统运行的实时值的比值来评价系统性能,系统的剧烈恶化源自于系统跟踪性能的恶化或者是模型失配,其性能指标无法直接评价系统的跟踪性能,因此,定义如下跟踪性能评价指标
(7)
式(7)中,N为数据长度,r1(k)-y1(k) 表示基准情况下设定值与系统输出的差值之和,r2(k)-y2(k) 表示设定值变化时系统输出与设定值的差值之和。当系统跟踪性能指标θ远小于1时,表明此时原本的系统控制器参数已经不再适用,预测控制的主要目标变成对输出设定值的跟踪。由图1可知,过程实际输出可表示为
y(k)=G0(q)u(k)+H0(q)e0(k)
(8)
故优化目标函数可表示为采用最优控制律的情况下应使用过程实际输出与设定值之间的偏差最小

(9)
其中,u(k)=u(k-1)+Δu(k), Δu(k) 取式(6)最优控制律。
2.2 以平衡模型误差为目标的控制器参数整定
根据杨世品等的理论[9],模型性能的高低取决于预测误差e(k) 和干扰输入e0(k), 通过模型质量指标(MQI)来诊断模型性能,即
(10)
式中:N为数据长度,当预测模型失配时,模型的预测误差增大,由最优控制律式(6)中相应的平衡误差项
ue(k)=dTH[G0(q)-Gm(q)]u(k-1)
(11)
应相应增加才能在控制输出中平衡误差,如果预测模型不改变,可通过调节控制器参数来实现。因此在模型失配导致性能严重下降的情况下可以进行以平衡误差为目标的控制器参数优化。输出中与平衡误差的控制输入对应的分量为
ye(k)=G0(q)ue(k)=G0(q)dTH[G0(q)-Gm(q)]u(k-1)
(12)
则优化目标为该项与实际模型预测误差e(k) 间的差值的平方最小,即

(13)
2.3 以克服扰动特性变化为目标的控制器参数整定
在利用子空间辨识技术辨识扰动模型时,由闭环输入输出数据估计得到的马尔科夫参数可作为性能评估的分析依据,因此本文根据文献[10]中马尔科夫参数推导方法提出扰动特性诊断指标,即
(14)
yd(k)=G0(q)ud(k)=G0(q)dTHd0(k)
(15)
则克服扰动特性变化的目标为该分量与系统扰动特性变化后的扰动量d0(k)=H′0(q)e0(k) 之差最小,即

(16)
2.4 兼顾3个目标的控制器参数整定
若系统性能指标、模型质量指标、扰动特性诊断指标同时给出了系统恶化的结论,此时应以3个目标优化函数联合建立新的目标优化函数,即
(17)
式中:以跟踪性能为目标的优化函数JSET、 以平衡模型误差为目标的优化函数JMIS和以克服扰动特性变化为目标的优化函数JDIS的可调参数同为P,M,Q,R,H, 因此通过调节控制器参数P,M,Q,R,H综合目标优化函数J尽可能的小,从而实现系统跟踪性能、模型性能、扰动特性的提高。
3 适用于参数整定的粒子群算法
3.1 改进的粒子群算法(ω-PSO)
基本粒子群算法[4]源于对鸟群捕食行为的研究,利用群体中的个体对信息的共享从而使整个群体的运动在问题求解空间中产生从无序到有序的演化过程,以此获得最优解。在算法中,由N个粒子组成的种群X=(x1,x2,x3,x4,x5)T, 连续变量Q,R,H和离散整型变量P和M构成了5维搜索空间,在种群中第i个粒子的位置xi=[x1i,x2i,x3i,x4i,x5i],x1i,x2i,x3i为连续量,x4i,x5i为离散整型量,速度为vi=[v1i,v2i,v3i,v4i,v5i], 连续变量所对应的粒子将根据式(18)来更新位置和速度,即
(18)
式中:c1和c2为加速常数,前者一般称为个体学习因子,后者一般称为全体学习因子,常取c1=c2=2;r1和r2为区间[0,1]之间的随机数;pji(t) 表示第i个粒子的第j维在迭代第t次时候的最佳位置,即局部最优点;gji(t) 表示种群在第t次迭代时的全局最优点;ω为惯性因子,适当的ω的取值在一定程度上可以克服基本粒子群算法容易陷入局部最优的缺点,因此构建ω-PSO算法,引入一个位置参数为0,尺度参数为1的标准柯西分布随机变量,对称积分区间与迭代次数有关,该随机变量在对称变化区间上的积分与在对称T区间上的比例作为概率值,ω的可取长度作为系数,两者的乘积作为改进的惯性因子ω,即
(19)
式中:t表示当前迭代次数;T表示最大迭代次数;ωmax、ωmin为惯性因子的最大值和最小值。
3.2 离散整型变量处理
为了确保离散整型变量所对应的粒子在位置和速度在每次迭代后仍然为整型变量,需进行取整操作,为此定义以下判别式:
(1)当 |xji(t)-yik|<0.5时
xji(t)=yik
(20)
(2)当 |xji(t)-yik|=0.5时
(21)

3.3 算法描述
步骤1 根据性能评估结果,选取式(17)相应的目标优化函数,定义目标搜索空间维度,本文中维度为5;定义种群规模;选取预测时域P、 控制时域M、 输出输入权矩阵Q,R以及反馈系数矩阵H的初始范围;定义改进粒子群算法中的参数c1,c2,ω; 随机产生初始种群,设定每个粒子的初始位置和速度,每个粒子中P和M所对应维度的初始位置设定为整数值; 设定最大迭代次数;
步骤2 计算每个粒子的适应度值,将每个粒子的当前初始位置设置为个体最佳位置pi, 将所有粒子中适应度值最小的粒子所在位置设定为全体最佳位置gi。
步骤3 根据式(18)、式(20)、式(21)更新每个粒子的位置;通过式(19)更新惯性因子ω, 计算更新后每个粒子的函数值,求出当前个体和全体最优值。
步骤4 判断算法是否达到终止条件,若是则输出最优解P,M,Q,R,H, 否则跳到步骤3。
4 实验仿真
以过程控制领域标准研究对象Wood-Berry精馏塔过程为例进行实验,如图2所示就是Wood-Berry精馏塔的示意图。
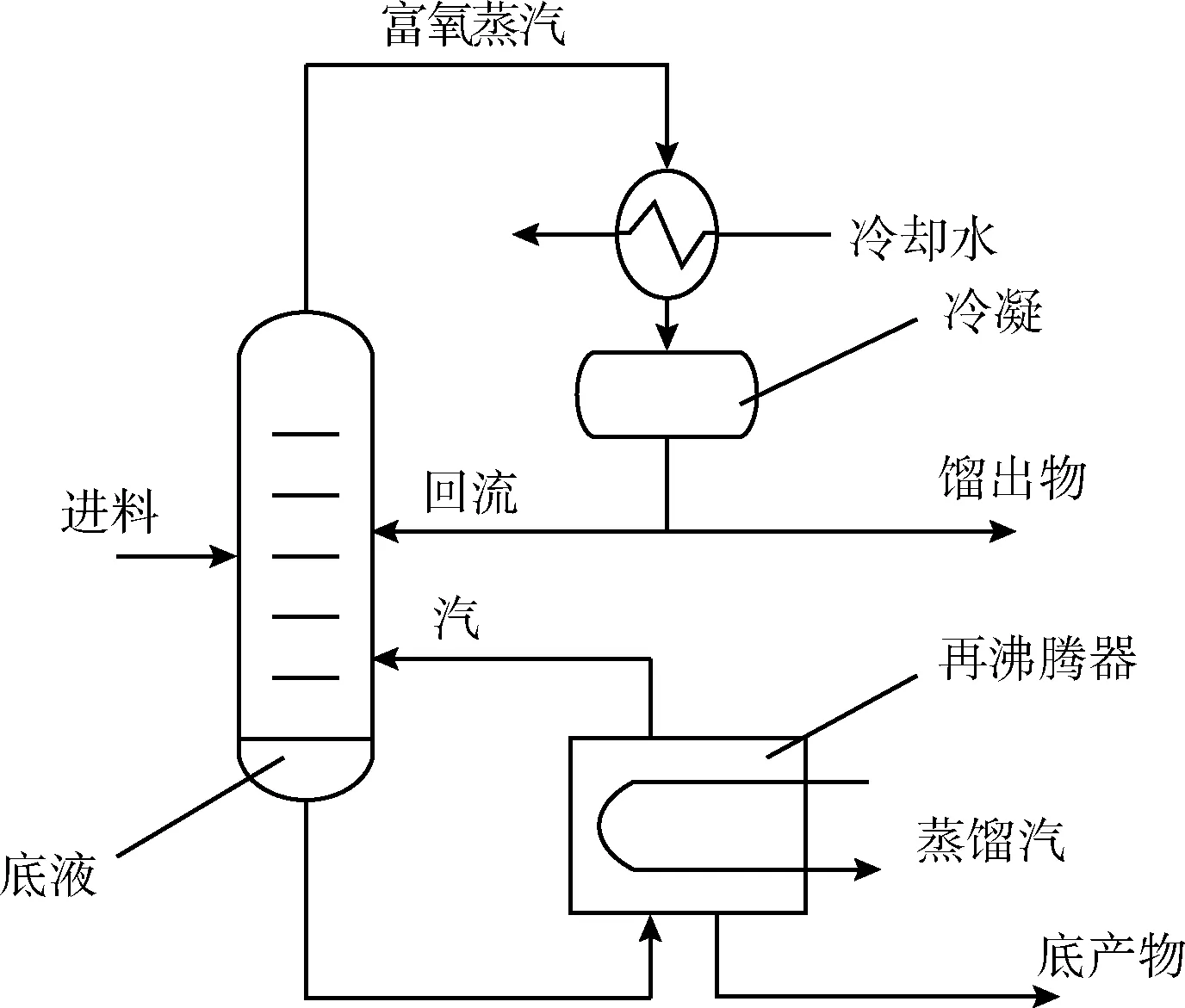
图2 Wood-Berry精馏塔
它是甲烷和水反应的精馏过程,是模型预测控制领域的经典实验仿真系统,特点是塔顶与塔底之间的相互影响较严重。控制系统具有两输入两输出,其传递函数为
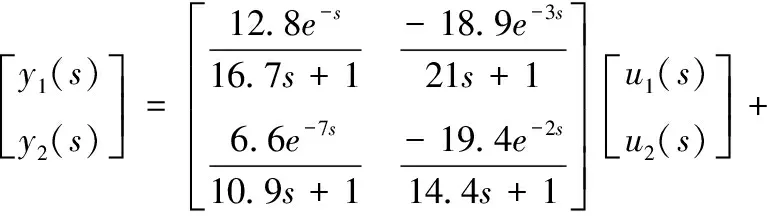
(22)
其中,塔顶回流量u1(s), 再沸器蒸汽流量u2(s) 为系统输入,塔顶甲醇浓度y1(s) 和甲醇馏出物浓度y2(s) 为系统输出,进料流量ω(s) 为扰动。
过程的传递函数转换为离散传递函数为
(23)
干扰离散传递函数为
(24)
系统输出y1、y2的设定出值分别为90%、5%。在系统正常的情况下,选取文献[5]中给出的目标函数作为被优化函数,采用文中算法去寻优获得初始动态矩阵控制参数:P=100,M=10,Q=diag{1,50},R=diag{1,2},H=diag{1,1}。
本文的仿真实验算法中均采用初始参数:ω=1,c1=c2=2, 种群个数为500,最大迭代次数为500。数据段的长短并不会影响最终的评估结果,为了保证实验的严谨性,下文实验中各阶段的采样点数均为200。
假定系统的第一阶段和第二阶段的控制器参数为系统输出y1,y2分别跟踪90%,5%设定值,模型精确,扰动特性不变时的数值,若系统在第二阶段设定值从90%减小到70%,5%增长到20%,输出通道1和2同时出现子模型失配,扰动模型的增益增长10%,模型失配情况如式(25)所示
(25)
系统输出曲线如图3(a)、图3(b)所示,虚线为设定值;第二阶段两条实线中震荡最为剧烈的实线为系统实际输出;另一条实线为系统预测输出。
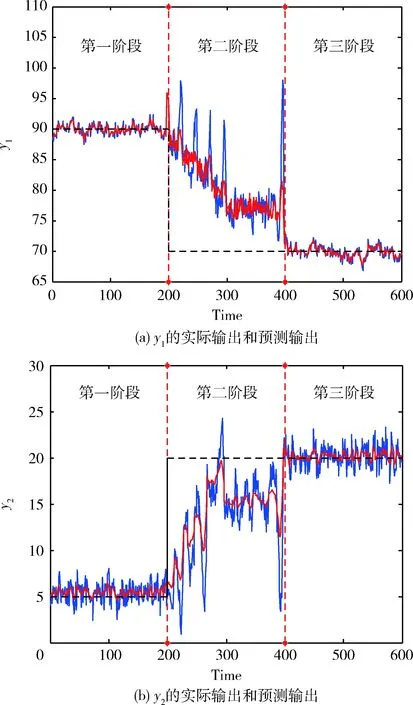
图3 系统输出曲线
由图3(a)、图3(b)可以看出,在控制的第一阶段(0-200采样点),此时为系统正常运行阶段,3种性能指标计算结果见表1。从第200个采样点开始,系统出现设定值变化,模型失配,扰动特性变化,此时的系统输出曲线如图3(a)、图3(b)第二阶段(200-400采样点),y1和y2的实际输出和预测输出曲线之间偏差较大且出现剧烈震荡,在到第400个采样点时仍无法很好跟踪变化后的设定值,第二阶段的各性能指标值计算结果见表1。
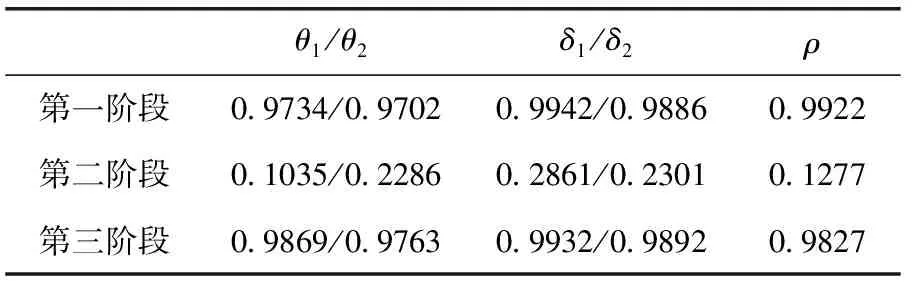
表1 各阶段各项性能指标
从表1中可以看出,第二阶段的各项性能指标都大幅度下降,系统原本的控制器参数已经无法克服性能的严重恶化,因此需要重新设定控制器参数。
上文中的各项仿真实验均是在单独性能恶化的情况下展开的,若是选取其上任意一个目标优化函数去求解最优控制器参数,其参数可提高对应的性能指标,但是其余两项性能指标得不到优化。因此选取式(17)为目标优化函数,选择控制器参数P的范围为1~200,M的范围为1~30,qi的范围为0~60,rj的范围为0~50,hii的范围为0~5,通过改进后的粒子群算法求解目标函数的最优值J=0.0014。 最优值对应的参数的最优解,结果见表2。将优化后的参数设定成第三阶段控制器参数,第三阶段系统输出曲线如图3(a)、图3(b)所示。
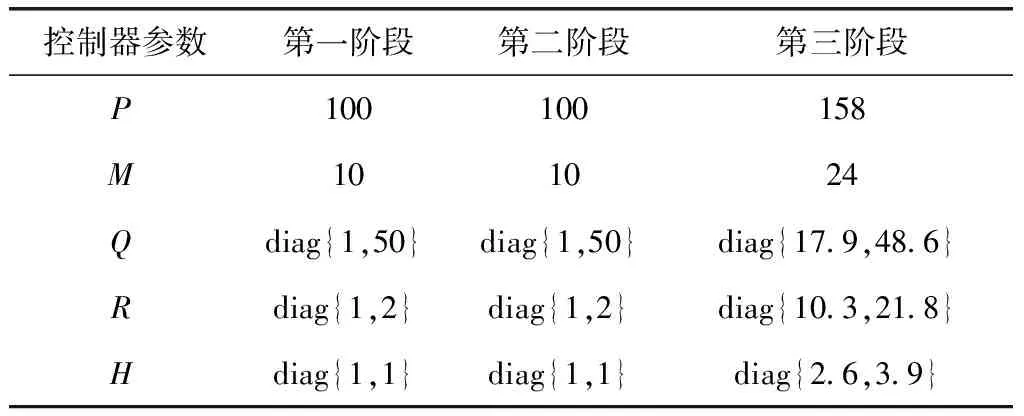
表2 系统各阶段控制器参数
由图3(a)、图3(b)第三阶段曲线可知,在第400个采样点处,y1和y2的曲线快速跟上设定值,并且在第三阶段能够很好跟踪设定值,实际输出和预测输出的拟合度很高并且剧烈震荡完全消失,系统整体性能恢复正常。这也验证了目标函数选取的有效性以及最优控制器参数的准确性。计算第三阶段的各项性能指标,结果见表2,相比于第二阶段都更接近于1。
5 结束语
本文针对系统设定值变化引起的跟踪性能指标恶化状况、模型失配引起的模型质量指标恶化情况、扰动特性变化引起的扰动特性诊断指标恶化情况,分别构造对应的目标优化函数,系统同时存在3种指标恶化时,提出一种兼顾3个目标的优化函数。针对基本粒子群算法无法优化控制器参数中整型量P、M以及容易陷入局部最优的缺点,提出一种可以同时整定连续量和整型量的改进粒子群算法,将该算法引入到Wood-Berry精馏塔实验,计算参数调整前与参数调整后的性能指标,通过比较验证了各项性能指标对应目标函数,综合3种性能指标的目标函数选取的有效性以及参数整定方法的可行性。
