“华龙一号”汽轮机旁路系统大气排放阀控制系统的优化
2021-03-05郑时波张庆国张钧浩
郑时波,张庆国,张钧浩
(中国核电工程有限公司 华东分公司,福建 福清 350318)
反应堆功率不能像汽轮发电机负荷那样快速地改变。在汽机负荷发生大幅度下降时汽机旁路系统(TSC和TSA)将主蒸汽直接排放到凝汽器和除氧器或者排放到凝汽器和大气中,从而为反应堆提供一个“人为”的负荷降低核蒸汽供应系统(NSSS)中温度和压力的瞬态变化幅度。汽机旁路系统大气排放阀用于控制二回路的主蒸汽压力。被控量为二回路主蒸汽压力,其设定值分为内部设定值和外部设定值;外部设定值由运行人员根据机组状态设定;内部设定值为固定值(7.75 MPa)[1]。在汽机旁路系统大气排放阀模拟验证过程中通过模拟设定值与测量值的偏差能够实现阀门的开关,但在验证过程中发现在实测值大于设定值范围内减小实测值时阀门会关一下,然后慢慢开到100%存在一个扰动现象。在实测值小于设定值范围内增大实测值时阀门会打开然后会慢慢关闭,存在随实测值增大阀门会提前动作的现象。以上两种现象与设计不符,尤其是第二种现象在设定值由内部给定值模式切换到外部给定值模式时设定值会跟踪当前实测值即主蒸汽压力次高值导致阀门开阀,不能实现无扰切换。此外该系统所有的大气排放调节阀在 BUP模式下由内给定值模式切换到外给定值模式时,设定值会变为上一次的外给定值无法实现无扰切换。以上两种情况均会在机组正常运行期间系统正常操作时可能导致阀门异常开阀,误触发机组安全动作影响机组稳定运行。
1 PI控制问题导致阀门异常开关的原因分析及解决方法
1.1 PI控制问题导致阀门异常开关原因分析
汽轮机旁路系统大气排放发阀(TSA)的调节与控制主要通过PI控制来进行,该系统的控制组态在安全级DCS系统平台中实现。其中P部分为比例部分,通过设定值与实测值的差值作为偏差(Xw)乘以比例系数(KP)从而输出阀门开度。I部分为积分部分,通过设定值与实测值的差值作为偏差(Xw)乘以扫描周期(Tcyc)除以积分时间(TR)再乘以比例系数后加上一个扫描周期(Tcyc)之前的积分部分阀门开度从而输出积分部分最终的阀门开度,积分部分的阀位开度在一定范围内是不断地累加的。阀门阀位最终输出为P部分和I部分的输出阀位相加(PI计算公式如下)。

因此验证过程中发现如果设定值与实测值偏差较大(偏差绝对值Xw>0.19 MPa)阀门会迅速地全开或全关,此时主要是PI控制的比例部分起作用(比例系数K=-526 %/MPa),当设定值与实测值偏差较小(偏差绝对值Xw<0.19 MPa)时PI控制的比例部分会瞬间给阀门一个开度,然后由于模拟验证过程中偏差一直存在,积分部分会持续累加一个与比例部分开关阀方向相同的阀门开度会使阀门慢慢地到全开或全关,此过程符合PI控制的原理。
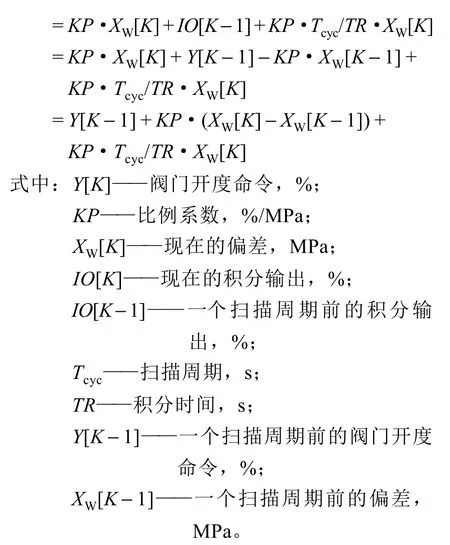
通过模拟验证时在组态图中将P部分和I部分的阀位输出数值分别记录发现当设定值设为7.75 MPa实测值为7.77 MPa时P部分输出的阀位在 6.75%左右I部分输出的阀位在持续增加至 93.25%左右后停止,阀门最终输出为100%与期望值一致。然而当设定值为7.75 MPa实测值改为7.75 MPa时P部分输出的阀位瞬间变为为 0%部分的阀位输出保持之前的 93.25%左右不动,因为此时设定值与实测值的偏差为0,I部分的阀位输出不再变化此时阀门最终输出为93.25%,因此阀门会从100%关到93.25%后不动与期望值不一致。若设定值维持7.75 MPa不变,以上实测值从7.77 MPa改到大于7.75 MPa的任一数值阀门最终输出会有一个关阀动作然后由于偏差Xw不为 0,I部分的阀位输出会缓慢增加到阀门最终输出100%为止,由于P部分因偏差存在有阀位输出,I部分的阀位输出将会停止在93.75%~100%,整个过程中阀门会存在一个由关到全开的扰动与期望值不一致。
同样当设定值为7.75 MPa实测值为7.74 MPa时P部分的阀位输出在-5%左右I部分的阀位输出会由之前的 93.5%缓慢降到 5%左右后停止,阀门最终输出为0%与期望值一致。而在设定值为 7.75 MPa不变将实测值由 7.74 MPa改为7.75 MPa时P部分的阀位输出瞬间变为0%由于偏差为0此时I部分会保持在5%左右停止阀位最终输出为 5%,若设定值保持 7.75 MPa不变实测值由7.74 MPa改为7.74~7.75 MPa由于偏差Xw不为零阀门会有一个小的开度(小于5%)然后再关闭,整个过程表现为实测值在小于设定值阀位内增加时阀门会异常开启(具体验证情况见表1)。
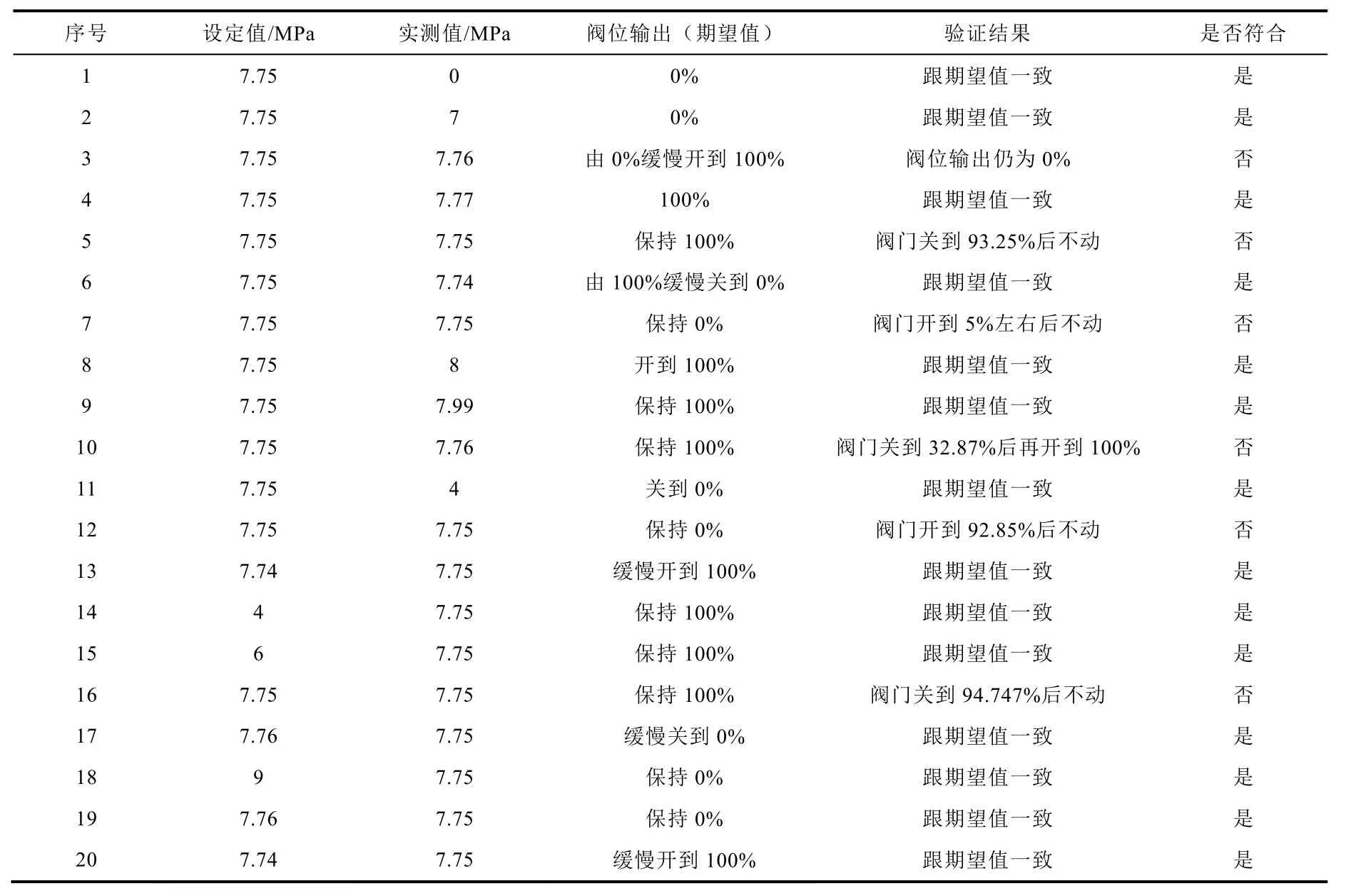
表1 5TSA系统修改前PI控制验证情况Table 1 PI control verification before modification of the 5TSA system
综上所述导致实测值在大于设定值范围内减小时阀门会有一个关的扰动以及实测值在小于设定值范围内增大时阀门会异常开启的原因在于当设定值与实测值的偏差一直存在时阀门PI控制中的积分部分(I)的阀位输出由于比例部分(P)的存在不能到 0%或 100%,经核实组态图发现切除积分使积分部分阀位输出停止的逻辑为PI控制输出的阀位下限0%和阀位上限100%。
1.2 PI控制问题导致阀门异常开关的解决方法
根据上述原因分析,为消除设定值与实测值的偏差变化时阀门异常动作的影响制定的解决方法有如下几点。
(1) 对已经运行机组的汽机旁路系统大气排放阀的功能图进行分析,借鉴同类电厂该问题的处理方法。通过运用SIVAT模拟软件对已运行机组的组态图进行制图后验证,发现当设定值与实测值偏差一直存在且当偏差Xw为正值时PI控制输出降到 0%后会有一个低限输出逻辑到PI控制的I部分使I部分的输出置0然后通过模拟使设定值与实测值偏差为0,此时P部分的阀位输出为0%,I部分的阀位输出保持之前的0%不变阀位最终输出为0%没有异常开阀动作或异常扰动,在设定值由内给定值模式切换到外给定值模式后阀门也不会突开能够实现无扰切换。当模拟设定值与实测值偏差一直存在且偏差一直为负值(偏差绝对值Xw<0.19 MPa)时阀门缓慢开到100%,然后模拟偏差为 0后阀门仍然会有一个关阀动作,原因与上面的描述一致,即阀门开到100%后I部分的阀位输出没有到100%就提前停止。因核电厂在正常运行中汽机旁路系统大气排放阀一直处于关闭状态只有在主蒸汽压力高于设定值时才会开阀,在阀门全开时的关阀扰动对机组影响不大且阀门很少会出现全开的情况,此条与预期不一致的阀门动作可持保留意见(验证情况见表2)。
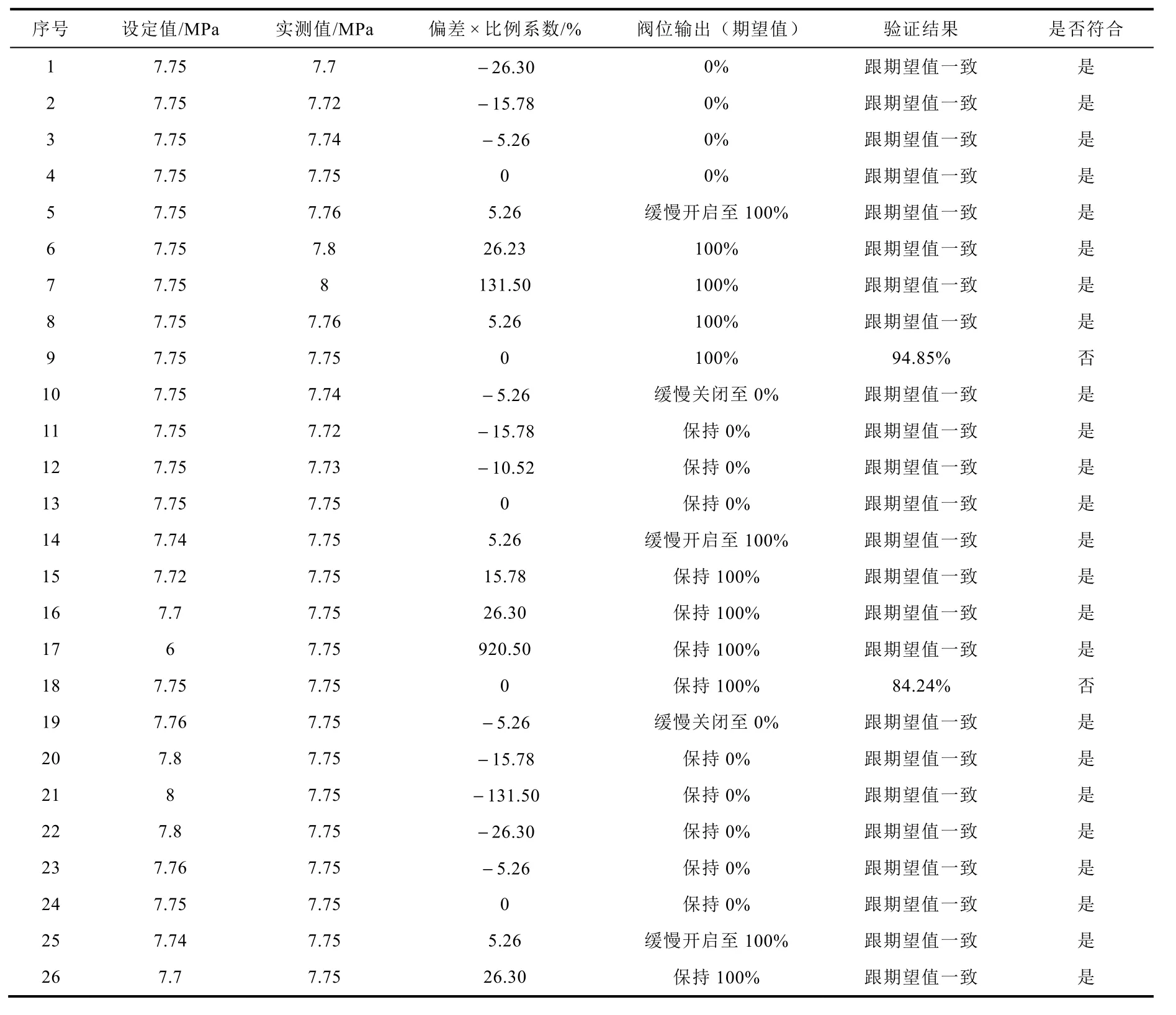
表2 同行电厂GCT-A系统PI控制验证情况Table 2 PI control verification of the GCT-A system in similar power plants
(2) 由于已经分析清楚阀门异常动作的原因,经过讨论方案定为在PI控制器的I部分的阀位输出处增加低限LL= 0%和高限UL= 100%的限制模块并将触发这两个限值的逻辑引到停止积分处同时删除原PI控制输出的低限和高限到停止积分处的逻辑,考虑到手自动切换时由于积分作用的干扰会存在一个很小的扰动,将阀门切手动状态的逻辑也引到了停止积分功能处。
通过运用SIVAT模拟软件对修改的组态进行DCS下装前模拟,设定值在内外给定值模式相互切换时能够实现无扰,设定值与实测值偏差按照编好的程序在各种情况下模拟时阀门动作与预期一致阀门在手自动切换过程中能够实现无扰切换(修改后的PI控制组态图见图1)。
图1 修改后的5TSA系统PI控制组态图Fig.1 Modified configuration of PI control of the 5TSA system
2 切BUP模式后阀门内外给定值模式无法实现无扰切换的原因分析及解决方法
2.1 切 BUP模式后阀门内外给定值模式无法实现无扰切换的原因分析
根据设计文件汽机旁路系统大气排放阀要求在 IIC模式下内外给定值模式切换、阀门手自动切换,BUP模式下内外给定值模式切换、阀门手自动切换,IIC模式与BUP模式相互切换,DAS模式与RPS模式相互切换时均需实现无扰切换,即切换时阀门不能够动作。经过对以上切换逐一验证,发现当阀门切换至BUP模式后设定值由内给定值模式(7.75 MPa)切换至外给定值模式时设定值不能跟踪主蒸汽压力次高值,这种情况会导致切换时阀门异常动作不能实现无扰切换。经过进一步验证和对组态图进行分析,发现当阀门切换至BUP模式后且设定值在内给定值模式时从非安全级机柜(NC)到安全级机柜(1E)的主蒸汽压力次高值信号会被BUP控制信号切掉然后保留切换时的主蒸汽压力次高值,此时设定值跟踪的不是实时的主蒸汽压力次高值,所以设定值由内给定值模式切换至外给定值模式后设定值会变为BUP切换时的主蒸汽压力次高值,这种情况可能会导致阀门动作无法实现无扰切换存在阀门异常动作的风险。
2.2 切 BUP模式后阀门内外给定值模式无法实现无扰切换的解决方法
根据2.1的原因分析结合组态内SPG模块的特性,为实现切BUP模式后阀门由内给定值模式切换到外给定值模式时能够实现无扰切换制定了以下方案:
在组态图中增加两个选择块,均由BUP控制信号进行切换。对于第一个选择模块,当BUP控制信号不存在时选择模块选择之前已有的IIC信号通道,当BUP控制信号存在时选择增加的主蒸汽压力次高值信号作为内给定值模式下设定值的跟踪值。对于第二个选择块,当BUP控制信号不存在时选择模块选择之前已有的给定值控制通道,当BUP控制信号存在时也选择给定值控制通道,但是由于SPG模块在给定值信号为1即为外给定值模式时会闭锁BUP盘台上设定值的加减信号,所以需在BUP控制信号存在时选择块选择的给定值控制信号上增加一个1 s的脉冲块。这样当切到BUP模式后阀门设定值模式由内给定值模式切换的外给定值模式时设定值会跟踪实时的主蒸汽压力值,此时阀门不会动作,1 s后便可以通过 BUP盘台上对应设定值的加减按钮根据需要改变设定值,这样既实现了BUP模式下内给定模式切到外给定值模式时的无扰切换又保证了切到外给定值模式后BUP能够根据需要改变设定值(修改情况见图2)。
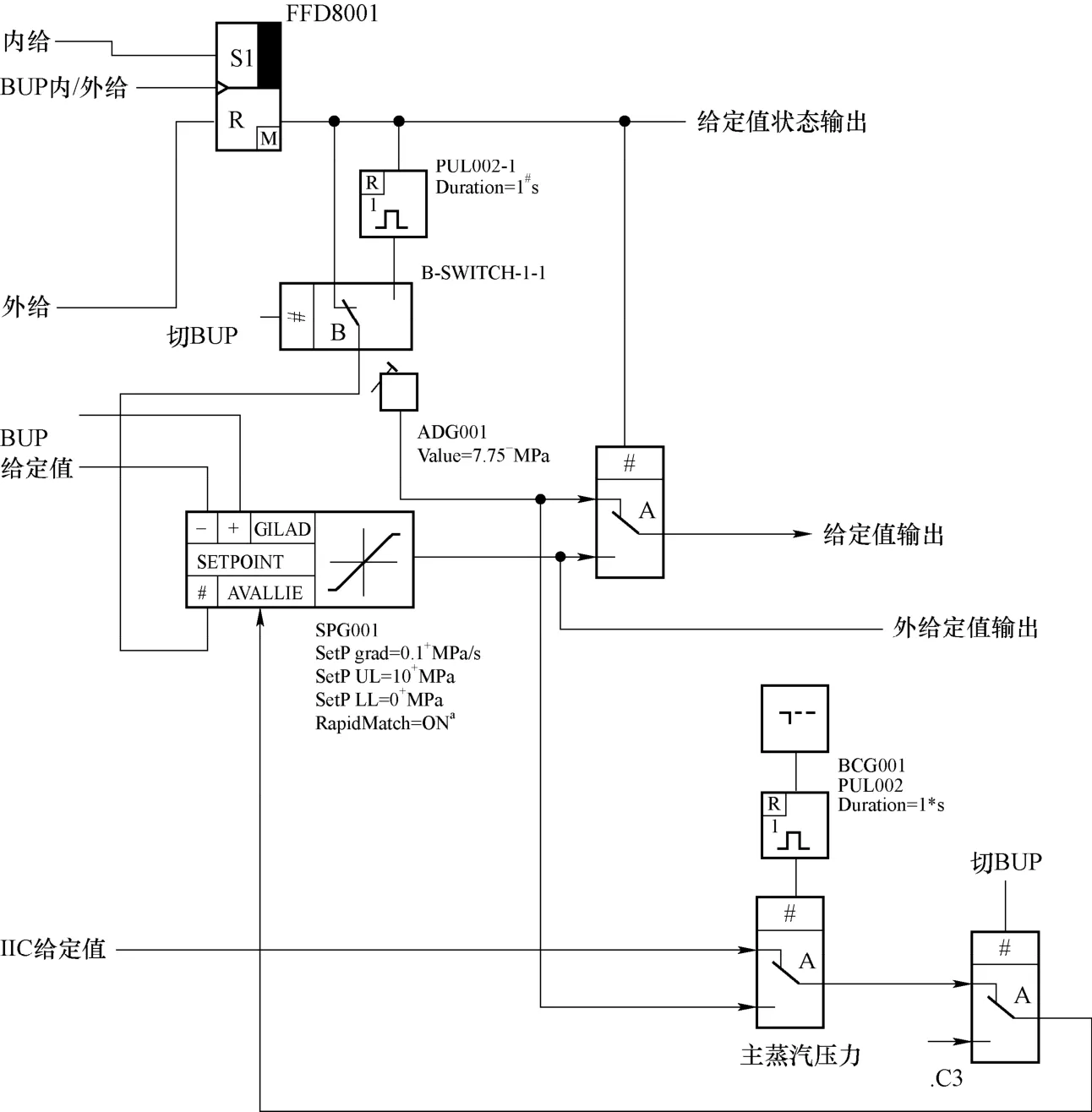
图2 修改后的5TSA系统内外给定值切换组态图Fig.2 Modified configuration of switching between internal and external given values in the 5TSA system
3 异常情况下系统的功能优化
3.1 设定值和实测值失效时阀门的动作分析及存在缺陷
汽机旁路系统大气排放阀通过设定值和实测值的偏差来实现阀门的开关从而达到对主蒸汽压力的控制,即主蒸汽压力在一定范围内是跟随设定值的变化而变化的。以上过程要求阀门是在自动的情况下实现的即闭环控制。由于信号通道故障或机柜失电等其他因素的影响,当阀门的设定值或实测时失效时阀门的状态将会出现不确定性从而影响机组的安全。通过对优化前的组态进行分析发现以下问题。
(1) 当设定值失效时设定值会保持失效前的值不变,此时将无法通过改变设定值来控制主蒸汽压力或一回路温度并且设定值失效时没有相关报警或提示,会影响操作员对系统的即时干预。
(2) 当实测值失效时实测值会保持失效前的值不变不能跟踪实时的主蒸汽压力值,当实时主蒸汽压力下降后操作员更改设定值减小时阀门可能会误开可能会触发机组安全动作影响机组安全运行并且实测值失效时没有相关报警或提示同样会影响操作员对系统的即时干预。
(3) 由于 TSA131/132/133VV 的实测值分别在1E的ⅡP/ⅢP/ⅣP三个通道中进行处理,阀门逻辑也分别在1E的ⅡP/ⅢP/ⅣP三个通道中进行处理,但是 TSA231/232/233VV的实测值分别在1E的ⅡP/ⅢP/ⅣP三个通道中进行处理阀门逻辑却分别在1E的ⅢP/ⅣP/ⅡP三个通道中进行处理,当三个保护通道的一个通道失电时会导致三个阀门不可用且当中有一个阀门的实测值会变为坏点导致系统对无法对主蒸汽压力进行有效控制,实测值跨通道的阀门可能会异常关闭。
3.2 设定值和实测值失效时阀门的动作优化
根据以上原因分析,当设定值和实测值失效时解决阀门动作异常或无响应对应的措施有以下几点。
(1) 当设定值失效时将用于处理设定值质量位的A-DFLT模块的“S”端的逻辑输出引到阀门的切手动逻辑和强制手动逻辑处,考虑到当触发快速冷却时阀门的切自动功能将设定值质量位触发到阀门切手动和强制手动的逻辑中添加一个1 s的脉冲块。这样当设定值失效后触发快速冷却触发时阀门仍然能够从手动状态切换到自动状态执行快速冷却功能。
(2) 当实测值失效时将用于处理实测值质量位的A-DFLT模块的“S”端的逻辑输出引到阀门的切手动逻辑和强制手动逻辑处,因为当实测值失效时会导致阀门的自动控制功能不可用,因此无需考虑快速冷却信号的切自动功能,即无需在且手动和强制手动的逻辑中添加1 s脉冲块。
(3) 当保护通道失电时对于 TSA131/132/133VV来说由于实测值的信号处理和阀门的逻辑处理均在同一个通道,故修改的方案与上述第(2)条一致。对于TSA231/232/233VV来说由于实测值的处理通道与阀门的逻辑处理通道不一致,需在阀门逻辑处理通道的实测值接收端增加一个A-DFLT模块将此A-DFLT模块的“S”端的逻辑输出引到阀门的切手动逻辑和强制手动逻辑处且无需增加1 s脉冲块。此外还需在阀门逻辑处理通道的实测值质量位接收端增加一个 B-DFLT模块并且将该模块的“Subst”和“Default”参数均置 1这样当上游的实测值质量位失效时该B-DFLT模块的输出会置 1,导致下游阀门的切手动逻辑和强制手动逻辑触发,从而防止阀门误动(修改情况见图 3)。
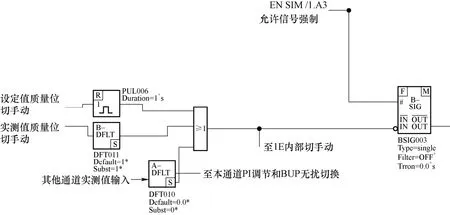
图3 增加的5TSA系统质量位保护功能组态图Fig.3 Configuration of the added quality bit protection function of the 5TSA system
通过对已运行的机组相关系统组态进行分析发现已运行机组在阀门切手动后若手动给定值失效阀门会因保护作用直接关闭,而现在调试的机组在阀门切手动后若手动给定值失效则会保持自动切手动时的值主要原因为已运行机组无DAS功能,现在调试的机组在阀门切手动后若手动给定值失效仍可以切换到DAS模式对阀门进行手动控制从而增加的系统控制的稳定性,相比之下现在新一代的机组更为稳定可靠。
4 结论
通过对核电厂汽机旁路系统大气排放阀的PI控制逻辑和其他相关组态进行分析,指出阀门在模拟验证过程中的扰动现象的原因为PI控制的 I部分即积分部分在阀门全开或全关后未能积分到100%或0%从而在设定值与实测值偏差改变时会出现扰动导致阀门异常动作。阀门在切换过程中不能够实现无扰切换的原因为设定值在内给定模式时其追踪值是上一次输入的外给定值而非主蒸汽压力次高值。此外通过增加阀门设定值和实测值失效以及控制通道失电时将相关阀门切到手动模式的逻辑来保证异常情况下系统的安全性能。以上优化能够很好地解决了阀门正常操作情况下的异常动作和无扰切换以及异常情况下阀门的安全动作问题,为系统的稳定运行及机组的安全性提供了保障。
