基于改进的Otsu法的地铁隧道裂缝识别方法研究 *
2022-02-10张振海贾争满
张振海,贾争满,季 坤
(兰州交通大学 自动化与电气工程学院,甘肃 兰州 730070)
0 引 言
近年来,我国地铁隧道建设进入了快速发展期,随着时间的推移,地铁隧道在使用过程中会因为材质和温度等原因产生裂缝,直接影响到隧道的稳定性和列车运行的安全性,因此必须对其进行有效的检测[1]。目前我国隧道裂缝检测主要依靠人工标记,效率低,工作量大,且受主观因素影响大,准确率不高。但随着机器视觉检测技术的日益成熟,裂缝检测的自动化程度也越来越高,基于图像处理的裂缝检测技术由于具有实时性高,精度高,可操作性强,便捷直观等优点,逐渐成为隧道裂缝检测技术的主要发展方向[2]。Y. NOH等[3]利用均值聚类来对图像进行分割;P. HUTHWOHL等[4]利用神经网络来对分割后图像进行分类;T. H. TRAN等[5]提取感兴趣区域,然后利用移动滤波器来滤除噪声;王博等[6]利用图像显著性来突出裂缝图像特征,结合Prewitt算子来检测裂缝,加入人工筛选来识别出裂缝区域;朱力强等[7]将噪声分为不同特征的噪声,然后分类处理来滤除噪声;王耀东等[8]将图像分为多个子区域,在子区域中对图像进行分割。但是目前大多数算法是针对路面裂缝来进行处理,对于地铁隧道裂缝的适用性较差,而且属于半自动的检测方法,对于分割中的参数确定是需要大量的实验来确定,工作量大,无法快速有效的对裂缝图像进行识别。为此,针对隧道图像具有光照不均,噪声复杂等问题,笔者采用Mask匀光和自适应灰度拉伸结合来提高裂缝图像的对比度;利用像素点领域灰度差值来判断噪声点,并只对窗口内的有效像素点操作来滤除噪声;最后在Canny边缘检测的基础上,结合Otsu法进行阈值分割,来对裂缝图像进行自动检测和识别。
1 隧道表面裂缝检测
1.1 图像预处理
地铁隧道在建设的过程中,由于地理位置的限制,达不到光照的均匀性。因此,笔者采用Mask匀光和自适应灰度拉伸相结合的方法来对图像进行预处理。
基于Mask匀光和自适应灰度拉伸结合的算法包括高斯低通滤波、图像差分和图像自适应灰度拉伸。高斯低通滤波抑制高频成分保留低频成分到达图像平滑;图像差分将原始图像与背景图像差分运算,消除光照不均的信息;自适应灰度拉伸是将灰度区间[a1,a2]内的点变换到灰度区间[b1,b2],能够有效的抑制噪声,增强裂缝对比度。

(1)
如图1,直方图均衡化和均匀拉伸改变了全像素灰度范围,同时增强了背景和目标图像,不利于后续裂缝目标的提取。基于Mask匀光和自适应灰度拉伸结合的算法有效的均衡了光照,并且在小范围内改变了像素的灰度值,也一定程度上增强了图像背景与目标裂缝的对比度,为后续图像滤波与分割奠定了基础。

图1 图像预处理效果对比Fig. 1 Comparison of image preprocessing effects
1.2 改进的自适应中值滤波
屈正庚等[9]提出根据噪声点的数量自适应的改变滤波窗口大小的滤波算法。笔者首先将图像中的像素点进行分类,分别采用不同的滤波窗口去滤除噪声,改进的自适应中值滤波算法如图2。

图2 改进的自适应中值滤波算法Fig. 2 Improved adaptive median filter algorithm
具体步骤如下:
1)遍历所有像素点领域。设定阈值T,计算当前像素点3×3领域内的区域灰度差值G。
2)当G≥T时,则为噪声点,采用自适应中值滤波,且对滤波窗口内的有效像素点进行排序,取中值,结果作为当前像素点的输出值,如图3。
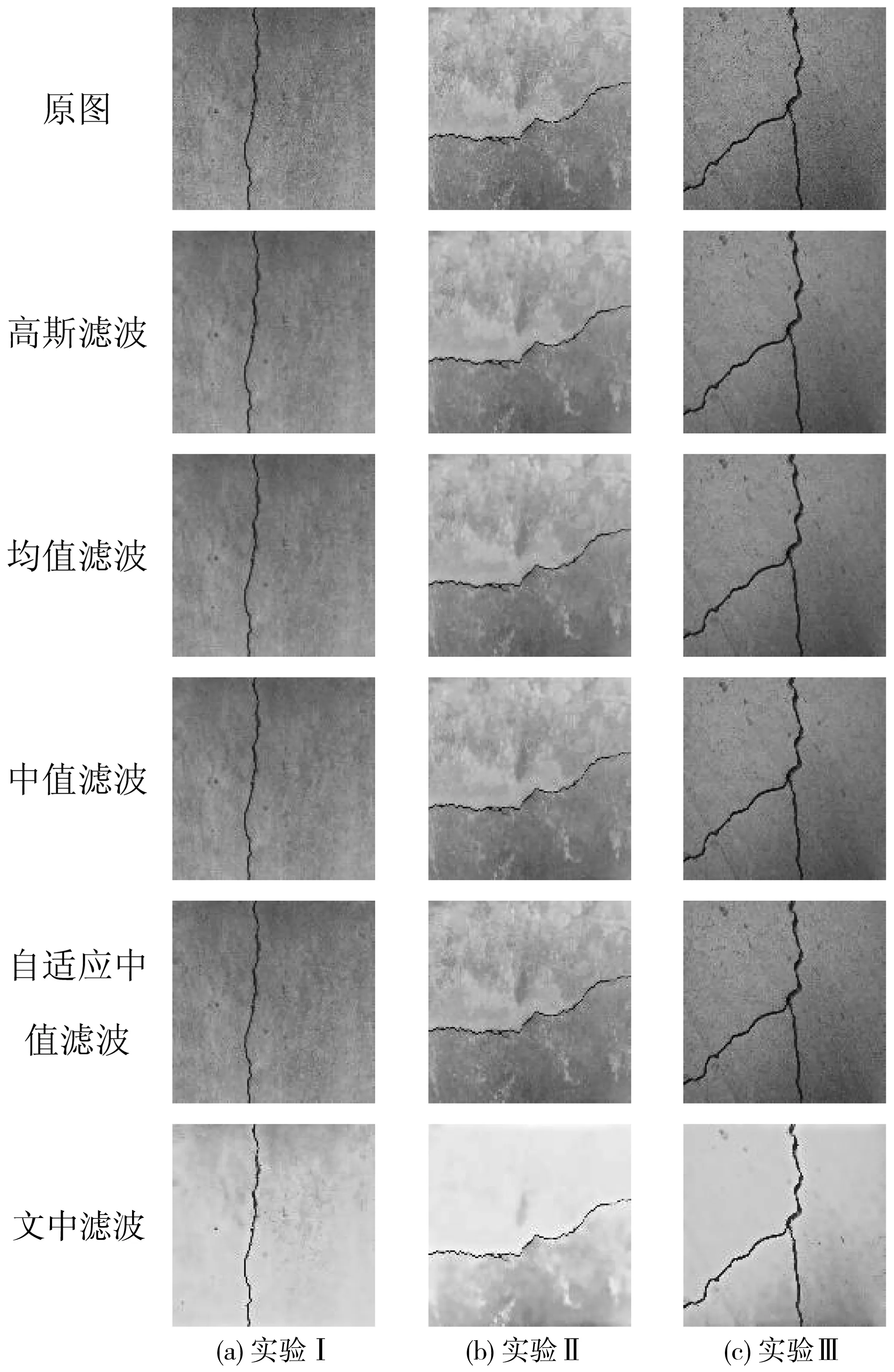
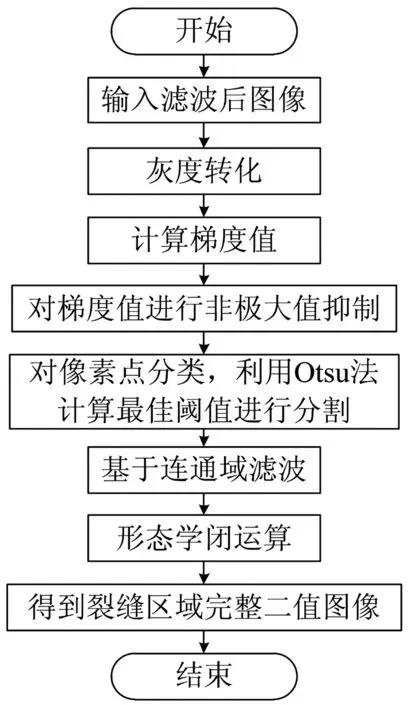
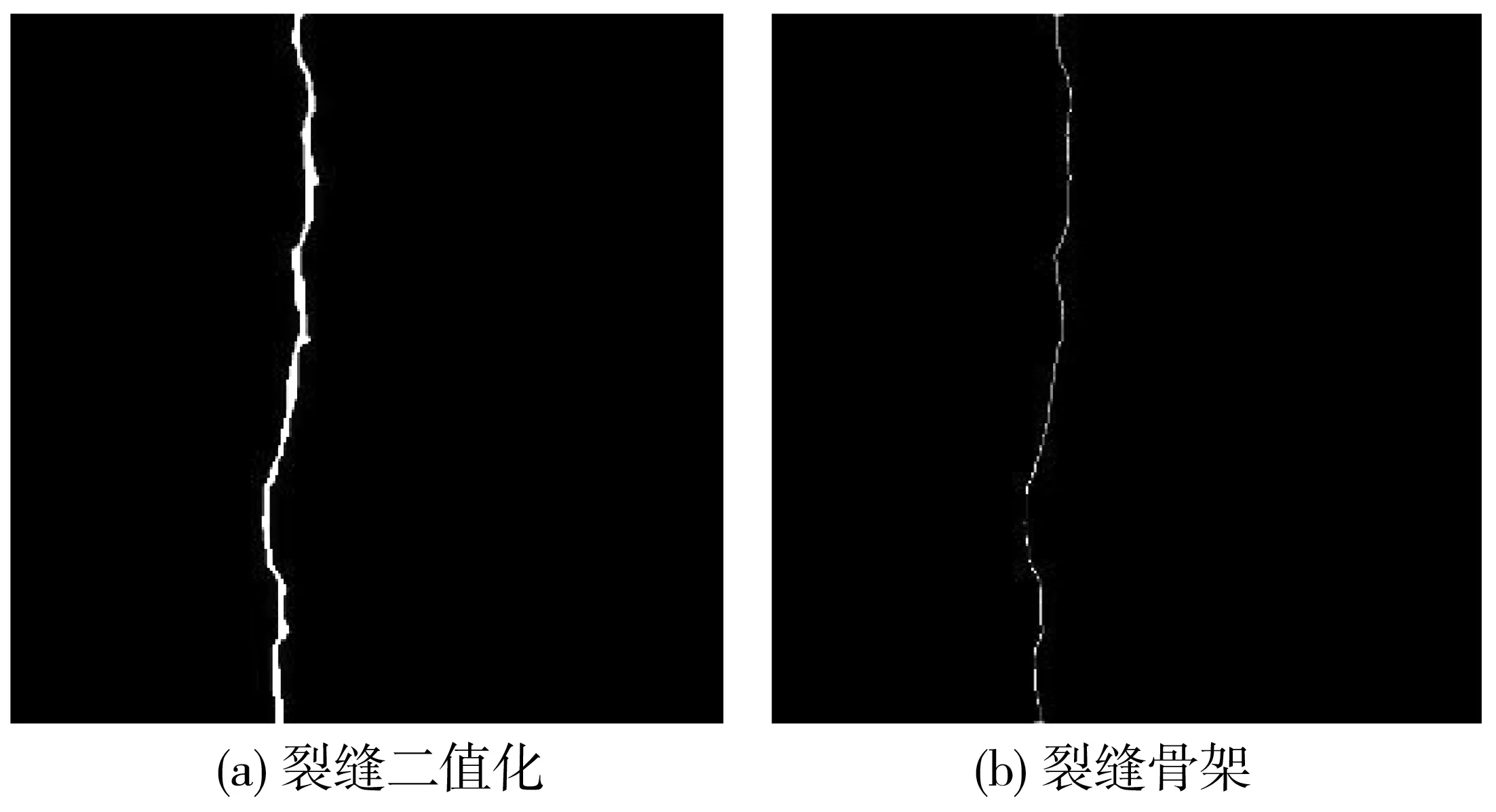
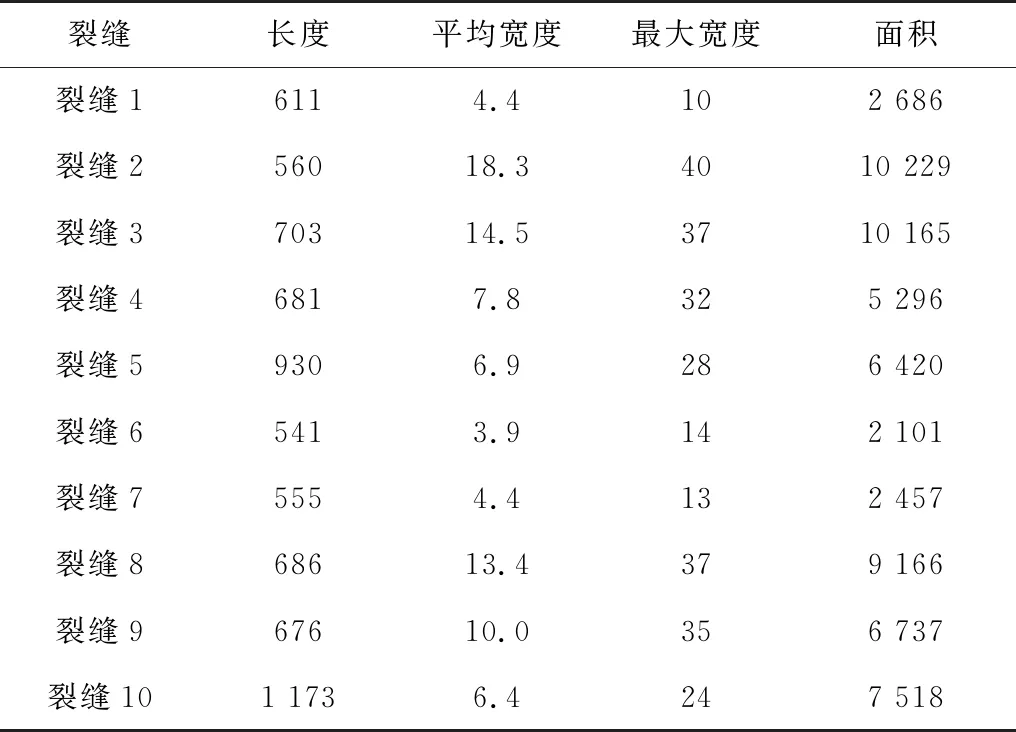
3)当G 图3 对有效像素点进行操作Fig. 3 Operation on effective pixels 为验证算法的有效性,将高斯滤波,中值滤波等应用到地铁裂缝图像进行实验对比,输出图像如图4(实验Ⅰ、实验Ⅱ、实验Ⅲ)。并以峰值信噪比(PSNR)作为评价指标,结果如表1。 图4 滤波方法比较Fig. 4 Comparison of filtering methods 表1 不同滤波算法对比客观评价Table 1 Comparison and objective evaluation of different filteringalgorithms 如图4,高斯滤波后的图像与原图像变化不大,均值滤波和中值滤波会造成裂缝边缘的模糊;自适应中值滤波后裂缝与背景的差别较小;笔者基于改进的自适应中值滤波模糊了背景部分,突出了裂缝目标区域,有利于后续图像分割。 从表1可以看出,通过对3种裂缝进行客观评价,笔者改进的滤波算法的峰值信噪比最高,也从客观上验证了笔者算法的有效性。 韦春桃等[10]提出一种移动窗口的阈值分割方法,在移动窗口中来识别细小裂缝;王睿等[11]针对隧道裂缝图像,提出将Prewitt算子和Otsu法结合的阈值分割方法,能够很好的识别出裂缝边缘,以便后续的图像特征提取;占继刚[12]通过计算连通域面积的方法,去除孤立点噪声;YU Tianting等[13]通过对隧道红外图像进行分块,在每一块中进行迭代法阈值分割,然后将分割后的子块裂缝进行连接,得到完整的裂缝图像;CHENG Yuhua等[14]通过图像连通域的特性,提出一种基于像素填充模型的自适应阈值选择方法,根据填充面积的变化来选择出比较好的阈值对图像进行分割。 笔者首先利用Canny检测进行非极大值抑制,然后将候选边缘点分为3类,利用Otsu法获取最佳分割点,对图像进行分割。改进的Otsu法阈值分割流程图如图5。 图5 改进的Otsu法阈值分割Fig. 5 Improved Otsu method threshold segmentation 具体步骤如下: 1)设经过改进的自适应中值滤波后的图像为g(x,y)。 2)遍历g(x,y)的所有像素点,采用2×2领域一阶有限差分式近似计算x的偏导数P(i,j)和y的偏导数Q(i,j),如式(2)和式(3): P(i,j)≈[g(i,j+1)-g(i,j)+g(i+1,j+1)-g(i+1,j)]1/2 (2) Q(i,j)≈[g(i,j)-g(i+1,j)+g(i,j+1)-g(i+1, j+1)]1/2 (3) 求出x,y方向的偏导后,则该点的梯度值M(i,j)和方位角θ(i,j)计算如式(4)和式(5): (4) (5) 3)进行非极大值抑制来细化裂缝图像。若点(x,y)的M(i,j)大于梯度方向相邻点的梯度值,则该点为候选边缘点[15]。 4)将候选边缘点分为A1、A2、A33类。设图像像素个数为N,梯度级范围为[1,L],通常取L=64,梯度级ti对应的像素个数为ni,各梯度级包含的像素数在总像素占比为pi=ni/N,i=1,2,…,L,则A1={t1,t2,…,tk}表示非边缘点;A2={tk+1,tk+2,…,tm}表示需要判断的点;A3={tm+1,tm+2,…,tL}表示边缘点,其中,k∈[1,L],m∈[k+1,L]。 5)计算最大类间方差,寻找最佳分界点。ti和pi由原图像的灰度直方图获得,则灰度均值E和像素占比p计算如式(6)和式(7): (6) (7) 则类间方差公式计算如式(8): σ2(k,m)=[EA1-E]2·pA1+[EA2-EA]2·pA2+[EA3-EA]2·pA3 (8) 计算最大类间方差σ2(k,m)对应的tk,tm的值即为A1、A2、A3区间的分界点,即为Canny检测的高低阈值,对图像进行分割。 6)去除孤立点噪声,进行形态学连接。通过连通域计算,将小面积的连通域滤除;利用数学形态学运算,连接裂缝图像中的断裂部分。裂缝图像分割效果如图6。 图6 裂缝识别结果Fig. 6 Crack recognition results 如图6,对滤波后的图像进行改进的Otsu法阈值分割能够准确地识别出裂缝区域,得到裂缝区域完整且噪声较少的二值图像,为图像特征提取奠定了基础。 通过对裂缝图像进行分割,得到二值图像,利用Zhang并行细化方法对其进行骨架细化。在裂缝骨架图中结合二值图像,提取裂缝特征参数。 裂缝的长度计算通常是计算目标在图像上中心点单层像素的轮廓,采用Zhang并行细化方法得到骨架图,如图7。 图7 裂缝骨架细化Fig. 7 Crack skeleton refinement 由裂缝的二值图像得到裂缝的骨架图,采用8连通Freeman编码,按照逆时针方向依次编码,遍历所有像素点,得到裂缝的链码[16],如图8。 图8 8连通示意Fig. 8 Eight-connectivity diagram 设1条裂缝为N(x,y),使用Freeman链码对其进行编码,链码长度计算如式(9): L=cNa+dNb (9) 2.2.1 裂缝面积计算 在裂缝二值图像里,从左上角开始,逐行逐列开始扫描,累计像素值为1的像素点,即为裂缝区域的面积S。 2.2.2 裂缝宽度计算 (10) 对于裂缝局部宽度,用5×5滑动窗口对整条裂缝进行扫描,确定局部法线方向,然后根据法线方向统计像素点的个数,作为裂缝的局部宽度,如图9。 图9 裂缝宽度扫描示意Fig. 9 Schematic diagram of crack width scanning 在获得局部宽度W1,W2,…,Wn之后,经过排序可得到裂缝的局部最大宽度Wmax。 对10组隧道裂缝图像进行裂缝的长度,平均宽度,最大宽度和面积的测量,结果如表2。 表2 裂缝测量结果Table 2 Crack measurement results px 基于Visual Studio2015+Opencv3.0平台进行系统界面仿真,实现从裂缝图像的输入,预处理,滤波去噪以及特征提取。界面左侧为图像操作区域,界面右侧为图像显示区域,并进行特征参数计算。地铁隧道裂缝图像分析系统界面如图10。 局部阈值分割是将图像分成不同邻域子块,根据子块中像素灰度值的均值作为该块的分割阈值来对图像进行分割,但当子块中完全为背景或目标时,直方图属于单峰,很难进行分割。 图10 地铁隧道裂缝图像分析系统界面Fig. 10 Interface of subway tunnel crack image analysis system 图11 裂缝图像阈值分割效果对比Fig. 11 Comparison of threshold segmentation effects of crack images 传统Otsu法是一种全局阈值分割方法,它是将图像直方图的灰度像素基于某一阈值分为两类,计算两类的类间方差,通过不断迭代,使得类间方差达到极小值,从而得到分割阈值。对于直方图具有双峰性的图像具有较好的分割效果。 最大熵阈值分割也属于全局阈值分割方法,是根据不同阈值进行分割,然后计算所有分割阈值下的图像总熵,找到最大的熵,将最大熵对应的分割阈值作为全局分割阈值,对图像进行分割,将图像中灰度大于此阈值的像素作为前景,否则作为背景。 为验证笔者算法的有效性,对不同场景,不同条件下的传统表面图像和裂缝图像进行实验,分别采用局部阈值分割法,传统Otsu法,最大熵阈值分割法以及文中算法进行对比,分割结果如图11。 由图11可知,局部阈值分割在对隧道图像分割后,能够识别出裂缝,但背景图中仍含有较多的杂质;传统的Otsu法阈值分割只能够识别出部分裂缝,不能够很好的区分开裂缝和背景图像,并且分割后图像中含有较多的杂质;最大熵阈值分割相比于局部阈值分割和传统Otsu法,效果较好,能够检测出完整裂缝,但也将部分噪声点误判为裂缝边缘,造成目标图像复杂。笔者算法准确地将目标和背景图像分割,能够得到裂缝区域完整且噪声点较少的二值图像。结果表明:笔者改进的Otsu法自适应的计算出最佳分割阈值,且能够准确的识别出完整裂缝区域。 1)采用Mask匀光和自适应灰度拉伸结合,可以在小范围内改善图像灰度分布,并平衡光照;针对隧道图像噪声复杂的问题,提出改进的自适应中值滤波算法,能够有效降低混合噪声的影响,保护了裂缝边缘信息。 2)改进的Otsu法能够有效的将裂缝分割出来,利用连通域计算和形态学处理,去除孤立点噪声,避免了图像目标区域缺失情况,得到完整的二值图像,和传统的Otsu法相比,能够准确地识别出裂缝区域。 3) 建立地铁隧道裂缝图像分析系统,对裂缝图像进行预处理,滤波,分割,特征提取以及位置标注,能够同时显示原图像与处理后图像,直观地对裂缝图像的处理结果进行对比。

1.3 基于改进的Otsu法阈值分割

2 隧道裂缝特征提取
2.1 裂缝长度计算


2.2 裂缝宽度和面积计算

3 实验结果与分析
3.1 实验平台设计
3.2 实验结果分析


4 结 论
