基于云模型SDG的航空发动机多工况故障诊断方法
2022-02-06张振良何荣荣张鉴靓
张振良,何荣荣,张鉴靓
(鄂尔多斯应用技术学院大飞机学院,内蒙古鄂尔多斯 017000)
0 引言
随着民航业的发展,发动机故障引起的飞行事故的比例不断增加,严重制约飞机的飞行安全以及航空公司的经济效益。因此对发动机故障的准确诊断和预测有着巨大的意义。由于航空发动机结构复杂以及高温高压的工作环境,单部件的故障可能引起更多部件故障的发生,最终表现为参数异常以及性能失效。在发现可视异常后,对可视的故障进行故障寻源以及故障传播分析才可以真正制定检测和维修策略。由于发动机系统的复杂性,常规的故障诊断以及故障传播研究仍有诸多困难需要克服。
杨康等[1]等通过分层的方法改善了符号有向图(Sign Directed Graph,SDG)模型,缩小了故障节点的搜索空间,通过前向搜索相容通路进行故障寻源,但在复杂系统中难以进行,且只能找出单故障源;莫志君[2]运用Petri网方法进行发动机故障寻源,结合重点防范部件,构建故障重点防范部件转子系统的故障诊断树,由故障诊断树作为中间状态实现故障petri网模型的搭建,通过故障petri网的正、反推理求取最大概率故障源,为航空发动机故障快速定位提供参考和依据。但其在进行定性与定量转化时需要定义所有节点状态值,在实际运用中较困难。
SDG模型只能做出定性分析,若是针对诸如发动机之类的复杂模型时,判断精度的量化至关重要。模糊理论隶属度的引入使定量分析成为可能,打破了非此即彼的概念。杨恒占等[3]等利用模糊变量表示节点变量,用条件概率表达节点间的定性因果关系,利用贝叶斯推理和回溯搜索找出故障源候选集,并对候选解进行排序。但是模糊理论确定界限时仍然过于严格,而故障的发生不可避免的具有随机性,模糊理论难以将模糊性和随机性关联起来;并且隶属度通常由专家经验给出,必然带有一定的主观性。
而利用云模型可建立定性概念与定量分析的沟通模型,通过云滴确定度来映射隶属度,通过随机赋值来展现随机性。田良[4]将正态云模型理论与灰云模型理论结合起来,构造单条件单规则云发生器进行不确定性的传递;戴剑勇等[5]通过挖掘风机老化状况及外部影响因素2个评价参数与风机故障发展趋势之间的关系,构建了基于云发生器的风机老化指数——外部影响因素评价的双因素云推测模型,并阐明了风机故障云推测模型的实施步骤。
如果只考虑飞机在某个飞行状态下的故障传播情况,当发动机功率变化时报警节点的阈值甚至整个SDG都会有所改变,但针对不同工况下的故障传播进行一一建模耗时耗力。因此本文引入工况转换矩阵来快速建立新的SDG,根据发动机系统实际情况对SDG合理分块,有序推理,引入故障关联矩阵以及云模型理论。
1 SDG与云模型
1.1 SDG模型
SDG是一种基于知识的故障诊断方法,通过图表表示变量之间的因果关系[6]。SDG模型由有向图G以及函数f组成。G由节点以及节点之间的有向弧组成,其中节点可表示系统物理变量、控制变量或者时间。即SDG模 型A=(G,f),其中G=(V,E),为有向图,V=(VS⋃VF),为节点集合,其中VS为状态节点,VF为故障节点。有向边集合为:E={e1,e2,…en}=(VS*VF)⋃(VS*VS)。f={ξ,Ψ,∂+,∂-},其中ξ={+,-}为有向弧e的符号,表示节点间的相互影响,Ψ={+,0,-}为节点的符号,表达节点的状态。若Ψ(∂+e1)ξ(e1)ξ(e2)...ξ(ek)Ψ(∂-ek)=+,则定义该支路为相容通路,故障只能通过相容支路传播[7]。
SDG寻找相容通路的推理过程包括正向与反向推理。本文采用的是反向推理方式,即从异常节点开始反向搜索所有可能相容通路,但如航空发动机之类的大型复杂系统拥有众多的节点以及传播路径,推理工作会出现信息爆炸的情况。
基于SDG的故障诊断方法原理是在有向图中通过节点的相互影响推理故障传播的路径来寻找故障源,优势在于不需要过多的信息。
1.2 云模型研究不确定性
设U为1个用精确数值表示的定量论域,A为U上的1个定性概念,若定量元素x(x∈U)为定性概念A的一次随机实现,x的隶属度μ(x)∈[0,1]为有稳定倾向的随机数[8]。即
则称x在论域U上的分布为云(Cloud),其中的每个x称为1个云滴。云的数字特征可以用来表征云的整体特性,以及描述信息的不确定性。云模型具有期望Ex、熵En、超熵He这3个数字特征[9]。
条件云发生器包括X条件云发生器以及Y条件云发生器,X条件云发生器输入为定量值x以及云模型的3个数字特征(Ex,En,He),输出为满足要求的多个X条件云滴(x,μ),具体算法[10]为:
(1)生成以En为期望值、He为标准差的正态随机数En*;
(2)计算μr=exp[-(x0-Ex)2/(2En*2)],生成云滴(x0,μr);
(3)重复上述步骤,生成足够的云滴数。
如果给定定性概念C上的确定度μ以及云的3个数字特征以及需要的云滴数n,通过云发生器生成云,这样的云发生器称为Y条件云发生器。算法如下[11]:
(1)生成以En为期望值、He为标准差的正态随机数En*;
(3)重复以上步骤,生成足够的云滴形成云。
2 基于多工况的发动机气源系统SDG模型
2.1 航空发动机气源系统
航空发动机气源系统是飞机空气管理系统的一部分,负责发动机和其他部分的引气调控。气源系统的故障会导致发动机气路系统失效进而影响发动机的推进性能,威胁到飞行安全[12]。
为了便于在SDG推理相容支路,根据各结构功能对气源系统进行模块划分,分为3个层级:系统级、子系统级以及部件级。
气源系统由引气子系统(Auxiliary Power Units,APU)、发动机引气子系统(Bleed Air System,BAS)、地面高压引气子系统(Ground High Pressure Bleed Air Subsystem,GHP)、控制面板(Control Panel,CPL)、综合空气系统控制器(Integrated Air System Controller,IASC)、高压活门(High Pressure Valve,HPV)、压力调节关断活门(Pressure Regulating Shutoff valve,PRSOV)、风扇控制活门(Fan Control Valve,FAV)、预冷器(Precooler,PEG)、预冷器组件(Precooler Components,PCE),传 感 器(Battery Temperature Sensor,BTS)等组成[13]。
引气转换以及通过IASC自动控制,例如发动机高压级引气经发动机高压压气机引出后,流经HPV以及PRSOV,最后提供给PCE,通过FAV以及BTS进行调节冷却[14]。气源系统工作原理如图1所示。
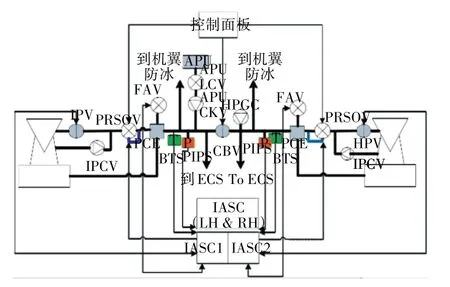
图1 气源系统原理
2.2 基于模块化的发动机气源系统SDG模型
若是直接对民机发动机系统建立SDG模型,必然会由于发动机结构复杂而使模型节点繁多、支路混乱、穷举相容支路,故障概率求取更困难。此时对SDG模型进行模块化处理就可以大大简化模型。
本文依据发动机气源系统具体结构功能,在其系统结构之上覆盖SDG模型,将系统功能特性通过模块属性表达出来,包括模块间以及模块内的故障传播关系,为变量间的影响关系设置使能条件。
对气源系统系统分析后,根据系统组成以及部件层次关系建立结构模型,针对每个模块加入具体的状态变量,根据实际故障传播情况以及部件相互影响关系继续在模型中添加状态变量与故障模式的联系,形成功能故障模型。
在此基础上选用SDG模型,采用模块、节点以及支路关系建立因果模型,得到模块化SDG图,如图2所示。

图2 气源系统SDG
具体步骤如下:
(1)根据发动机内部结构以及结构层次关系建立模块化系统图,由控制面板、综合空气控制系统、APU引气系统、发动机引气子系统、地面高压引气系统和检测系统组成。
(2)为每个模块分别添加状态节点以及故障节点。包括17个状态节点(其含义见表1),在图2中以正方形表示,以及10个故障节点(其含义见表2),在图2中以椭圆表示。
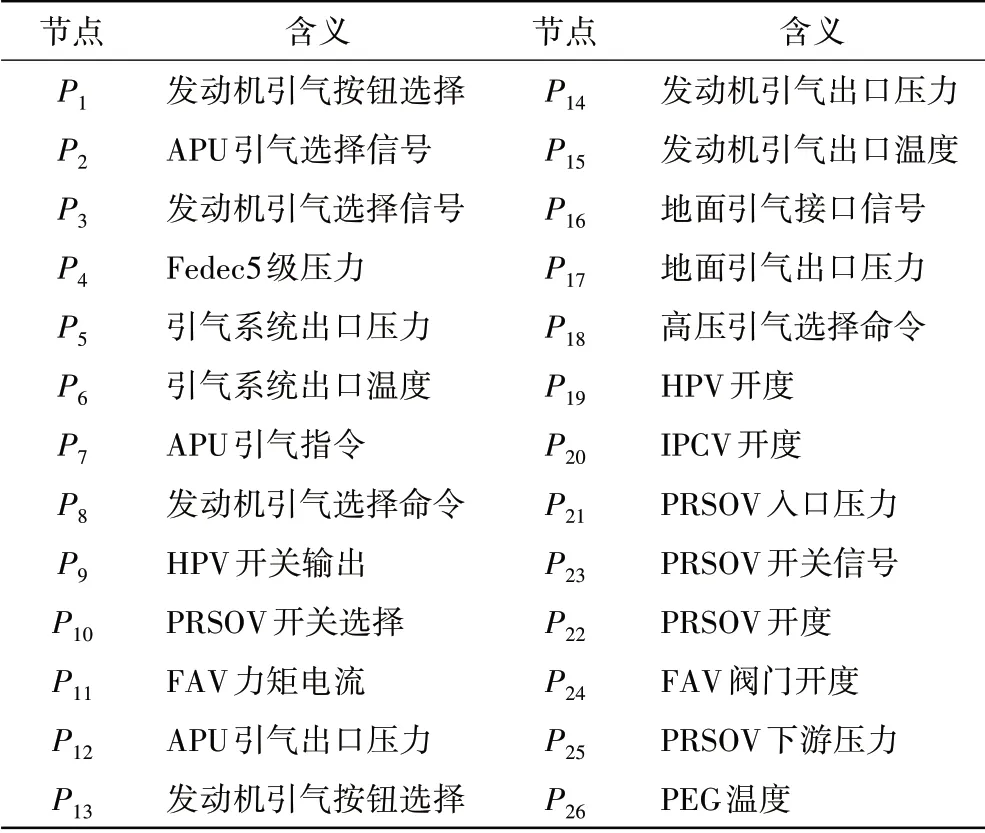
表1 状态节点及其含义
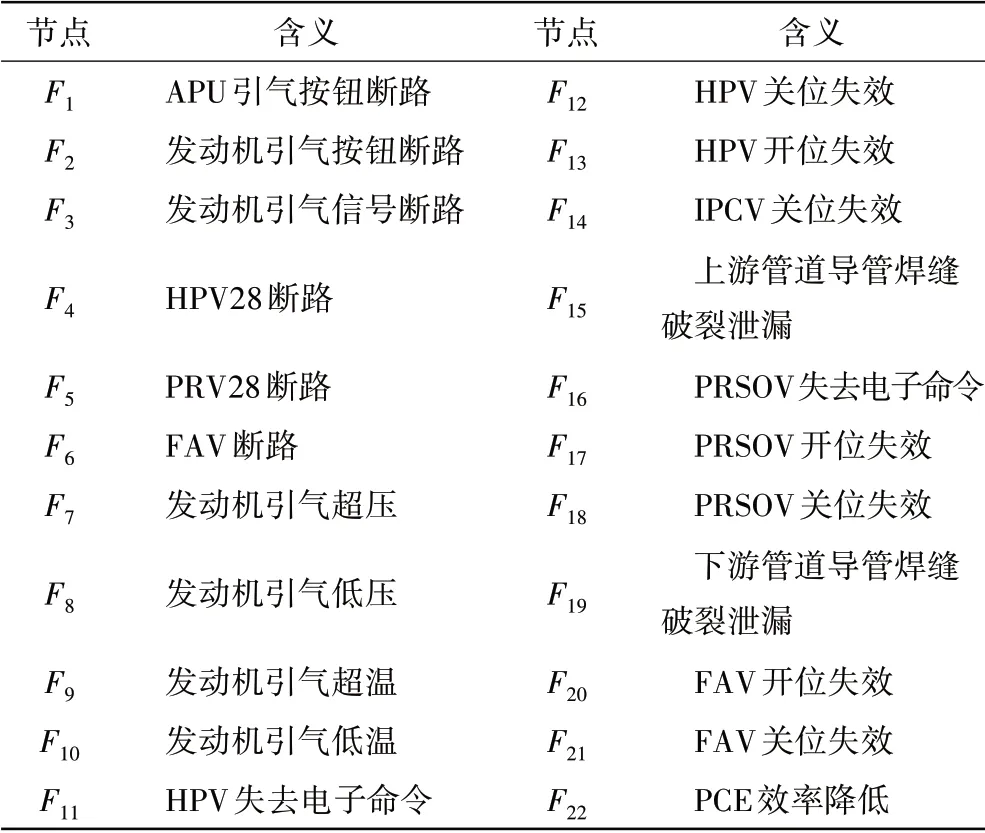
表2 故障节点及其含义
(3)根据故障模式及影响使用红色虚线为每个故障节点连接到相应状态节点,根据模块间以及状态节点间关系以黑色实线箭头连接状态节点。
2.3 基于多工况的SDG模型
由于飞机的飞行具有多个阶段,每个阶段发动机的工作状态都不相同,比如飞机经历起飞和降落时发动机的推力、系统结构功能和内部环境都不同。对于气源系统而言,各状态变量报警阈值可能都会改变,故障传播关系也可能改变[15],因此不同阶段下的SDG静态模型并不相容,更不能用以进行故障寻踪。
虽然不同阶段下的SDG模型并不一致,但在系统工况相对稳定时,SDG模型就不必调整结构参数,定义为不同工况下的SDG模型,根据飞行阶段分为以下7种:滑行D1—起飞D2—爬升D3—巡航D4—下降D5—进近D6—降落D7[16]。但不同工况下的模型描述是同一系统而有共通点,对于发动机SDG模型而言,在不改变整体模型特性的条件下,通过工况转换矩阵重新调整单工况模块内元素以及模块间关系进行工况转换,具体步骤如下:
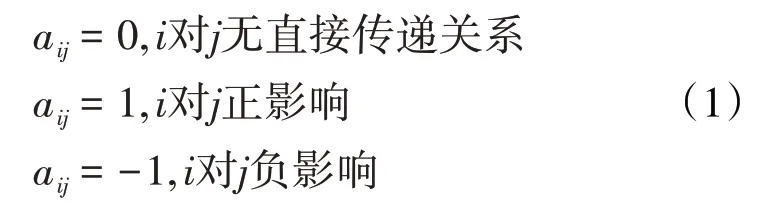
(1)建立工况转换矩阵。列出模块内所有n个节点,用n阶布尔矩阵A=(aij)n*n来表示节点间关系,对于矩阵内不在对角线上的所有节点有:
(2)状态节点阈值更新。通过根据发动机具体情况,为每个工况D设立对应报警阈值,云模型特征值等参数;
(3)工况转换:将布尔矩阵非零元素套入SDG模型中,根据矩阵非零元素,若为1则2点间作实线,若为-1作虚线。快速建立新工况下的气源系统SDG模型。
3 基于云模型的故障传播路径排序
3.1 基于故障-故障关联矩阵的相容支路寻找
故障-故障关联矩阵(Fault-Fault correlation matrix,Ff)[17]算法思路为:由根节点向前搜索有效节点形成相容根树,通过相容根树推理相容通路[18]。Ff定义为如下n阶方阵见式(2),φ(ei→j)为节点间所有支路符号乘积,fij∈[ ]1,-1,3,“1”表示增强效果,“-1”表示减弱效果。Ff矩阵描述了状态传递规律,通过Ff矩阵和测量向量来推算状态矩阵L,依照可达性理论进行相容通路搜索,得到相容根树的节点集合N={Vi|Cj(i)≠0,Cj(i)≠3}。

3.2 基于云模型的相容支路可能性计算
依据计算的相容通路画出故障传播图,基于云模型的隶属度计算如图3所示。以P2的异常状态值x已知为a,P1节点未测,计算故障在传播路径的隶属度μ1、μ2以及P1预测值。
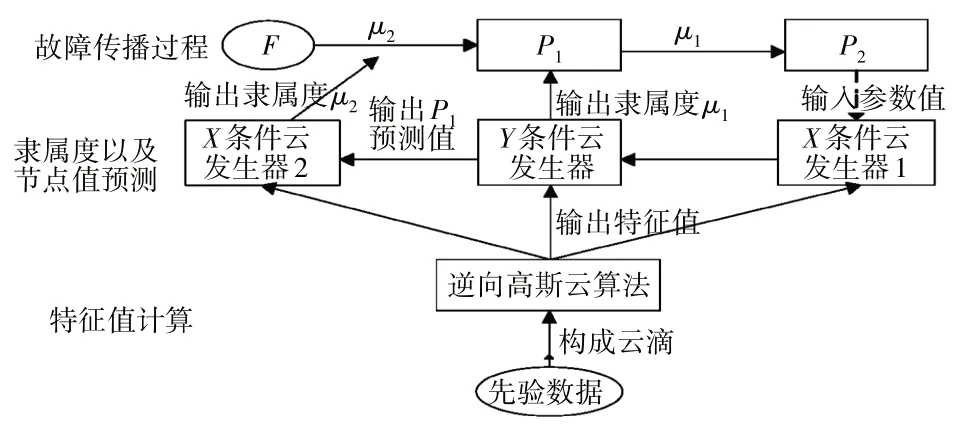
图3 基于云模型的隶属度计算
(1)根据先验知识获得不同的x以及其由P1异常引起的概率y,即获得(xi,yi),使用逆向高斯云算法获得特征值(Ex,En,He);
(2)将a以及特征值输入到X条件云发生器中,输出隶属度μ1;
(3)根据特征值以及μ2通过Y条件云发生器得到P1预测值,再根据预测值以及X条件云发生器得到μ2;
(4)依照上述步骤向前回溯,得到所有未测节点的预测值以及故障传播隶属度。
以ARJ21-700飞机气源系统为例,检验所提算法在实践中的应用。通过引入发动机运行过程气源系统实际故障情况,以模拟上游管道导管焊缝破裂泄漏情况为例,讨论故障节点以及传播影响。
在此实例中,飞机工况为巡航D4,观察到控制面板引气引号灯以及压力调节关断活门信号灯为绿色,引气压力为368.2 kPa,引气出口温度为200℃,其他节点视为未测节点[19]。工况D4下引气出口温度及压力均偏高。
首先构造D4下的转换矩阵FZ,根据F4画出SDG模型(图2),根据报警节点P6、P7,基于节点P6的反馈回路计算Ff矩阵,见表3,根据观测结果确定测试向量T,并计算状态矩阵L,见表4。
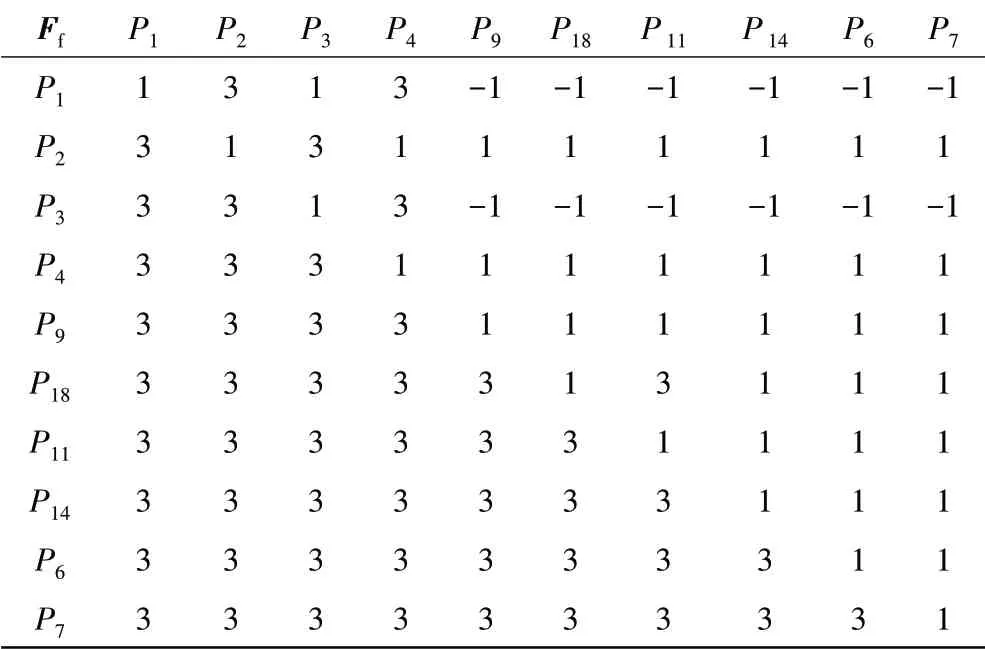
表3 故障关联矩阵Ff
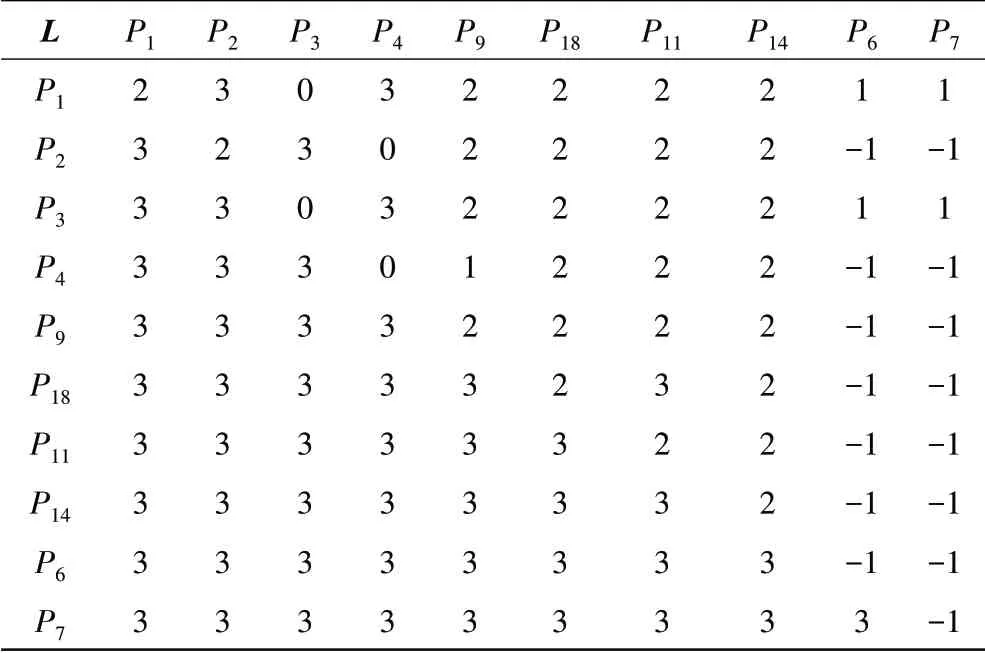
表4 状态推理矩阵L
从P6回溯,由L推理得到P6偏小的倒数第2个传播节点可能为P1、P2、P3、P4、P9、P18、P11、P14、P7。在确定P1、P2正常时,对L进行λ运算得到P6与其他节点的相容信息向量C

由此得到造成P7偏高可能的相容根节点(P9、P18、P11、P25、P6)已经包括P6,不再从P6回溯,对于节点P25的下一级模块继续进行搜索,画出对应的引气调节子系统SDG,如图4所示。
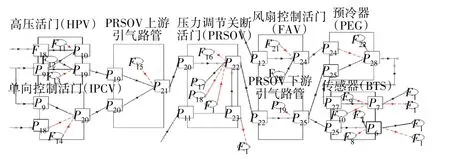
图4 引气调节子系统SDG
对此模块按照上述方法继续计算Ff矩阵,得到整个气源系统导致P6、P7异常的可能故障节点集合以及可能的相容通路,见表5。
根据推理得到的相容通路画出故障传播路径,如图5所示。
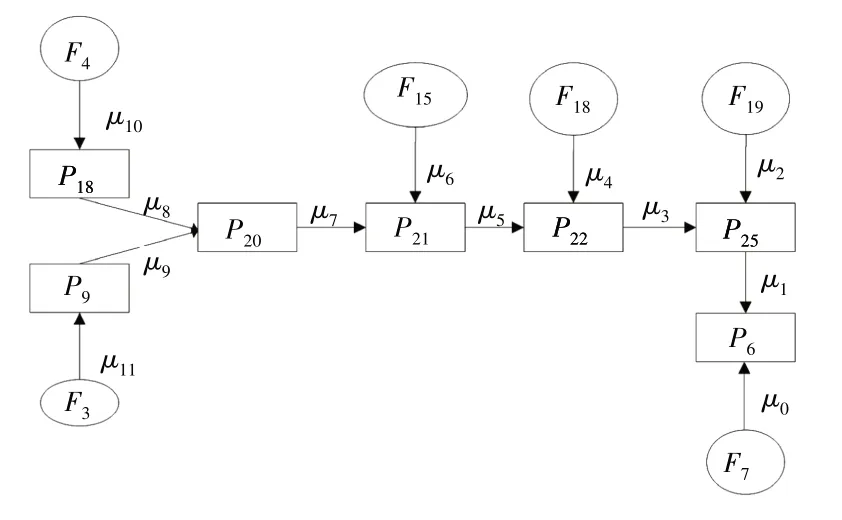
图5 故障传播路径
按照第3.2节的方法,通过根据先验知识中形成概念:“P25偏高引起P6偏高”的云模型,云滴数取3000,如图6~8所示。通过逆向高斯云算法[20]计算得其特征值(Ex=231.6 kPa,En=0.8,He=0.08),将P6=359.2 kPa输 入X条 件云发生器中得到μ1=0.13,并输入到Y条件云发生器中得到估计值P25=121.3 kPa,根据概念“F19偏高引起P25偏高”的云模型再继续向后推理。
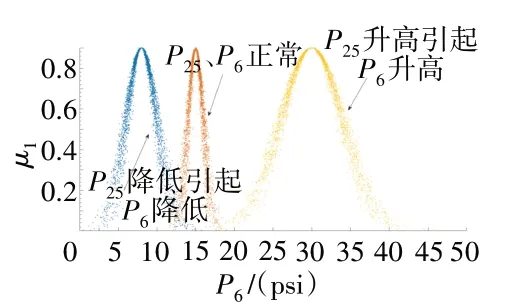
图6 F19偏高引起P25偏高云模型
在故障节点,根据故障的严重程度的定性考量形成定性规则推理库[21],见表6。以F18为例,形成云模型(图7)。
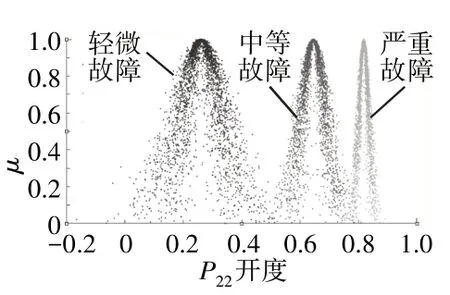
图7 故障概率云模型

表6 定性规则推理库
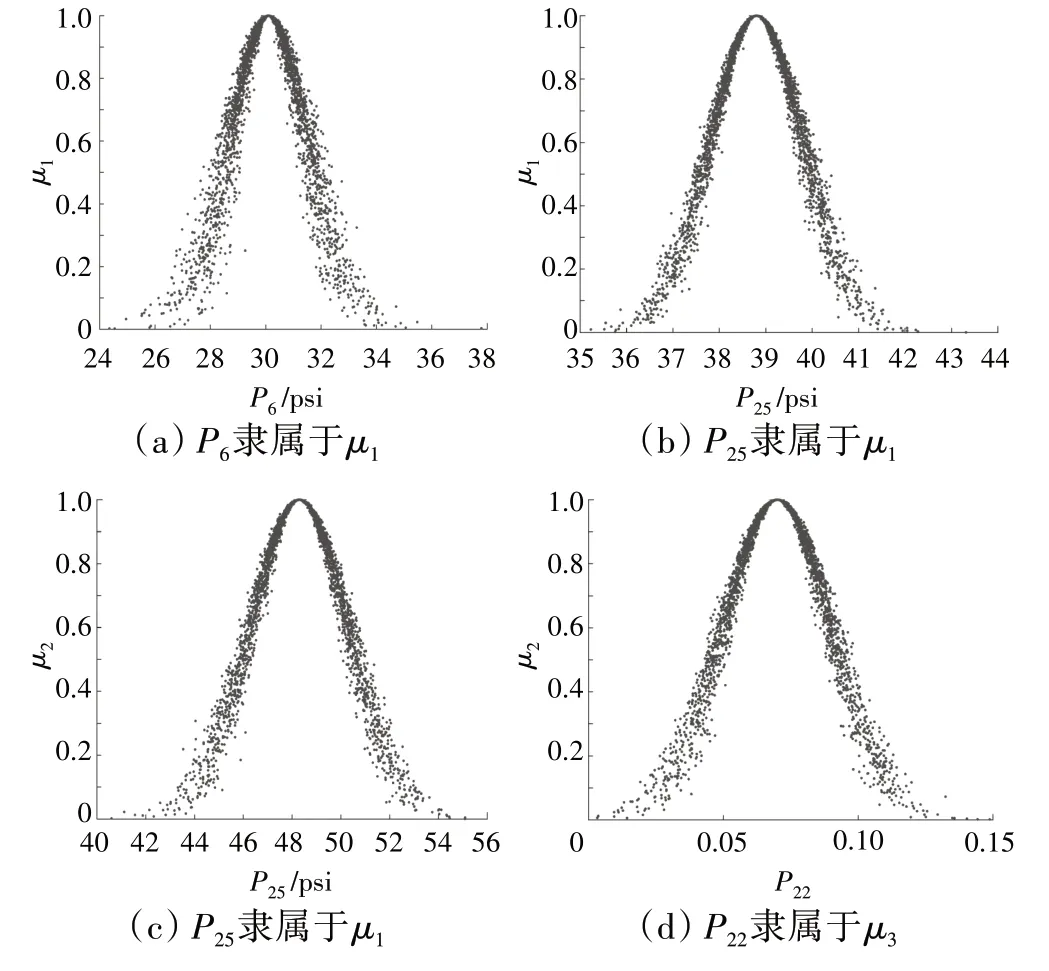
图8 传播各节点云模型
在P20节点,由于有分支节点,采用2维云发生器,对数值型属性离散化,仍然生成3000个节点,生成云表示的概念集,如图9所示。
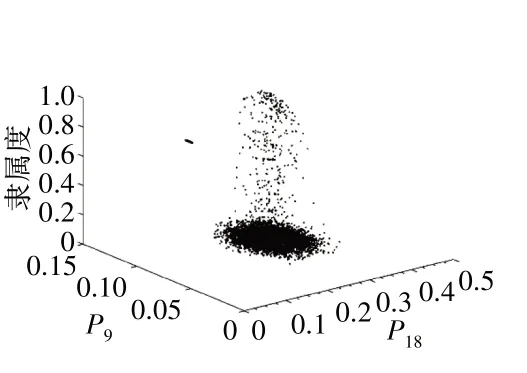
图9 2维云表示的概念集
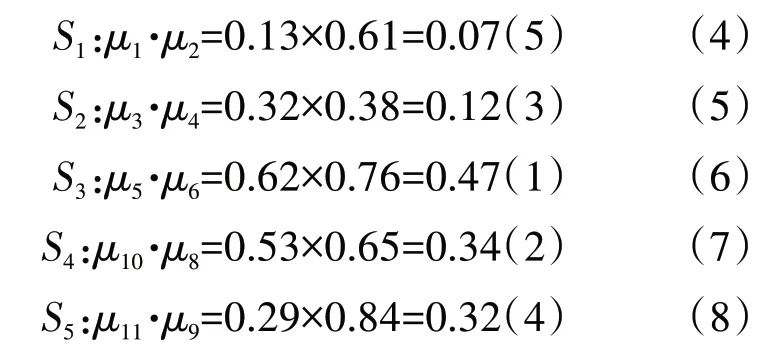
按照上述方法继续计算各云模型特征值以及故障传播隶属度μ,由于P9以及P10为非数值节点,无法形成云,直接选取先验概率作为隶属度μ。结果见表7。
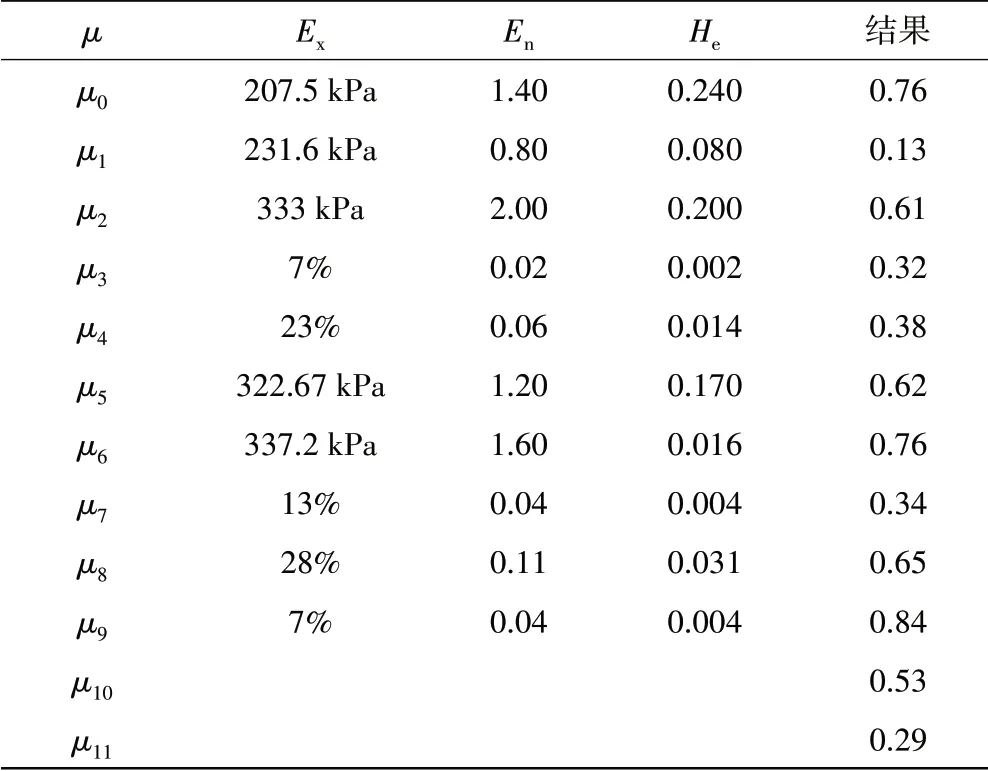
表7 隶属度以及特征值计算结果
备注数字为概率排序,根据云模型特征值计算传播路径概率
由此得到最终的结果:现阶段导致发动机引气超压(F7)的概率为μ0=0.76,应及时处理,故障源头最可能为上游管道导管焊缝破裂泄漏(F15)以及HPV28断路(F4),按照推理结果检修发动机引气传感器超压报警,推理结果与上游管道导管焊缝破裂泄漏的故障模拟结果相同。表明了预测方法的有效性。
5 结论
(1)对SDG模型的模块化可以在复杂的发动机系统中更快地寻找到可能的故障节点及其下属模块;
(2)工况转换矩阵避免了为不同工况建立模型的复杂步骤;
(3)云模型结合了随机性和模糊性,可以对传播过程进行定量考量,也能对未测节点的状态值做出预测。
由于发动机运行工况的连续性,在实际飞行中的发动机工作状态与各工况的对照情况尚不明朗。本文所提方法只能对单故障进行诊断,不能对多故障进行寻源。下一步研究将着重于模型与时间函数关联方法以及对多故障的诊断方法。
