块状食品枕式包装机多轴同步控制
2022-01-25
(江苏联合职业技术学院苏州工业园区分院,江苏 苏州 215100)
0 引言
枕式食品包装机是用于固体食品包装的常用设备。随着计算机技术、自动化技术和传感器技术的发展,食品包装机也得到了快速发展,它有效地提高包装机械的工作效率以及工作精度,大大提高了生产效率[1-3]。
传统的食品包装机通常是通过一个机械总轴由链条和齿轮将各传动轴连接起来,但该传动方式由于由机械结构连接,使得误差不断积累,从而导致其控制精度差,且其中一个传动链条出现问题,需要对其他机构重新调整调试。因此,在食品包装高速运行的情况下,传统的控制方法很难达到高精度、高效率以及高自动化的包装效果。
无轴传动技术完全摒弃了传统的链接传统,通过软件控制方法将各轴分别独立进行控制,使得各轴能够相互联系又互不干扰,从而实现多轴电机的同步自动控制[4-6]。目前,多轴同步控制方法主要有主从级联控制、交叉耦合控制和偏差耦合控制等。主从控制方法较早应用到同步控制中的,该方法主要是后级电机以前级电机作为目标值进行跟随,其余电机均跟随主轴运动,但该控制方法不存在耦合性,当存在扰动时,其同步控制效果并不理想。
为了实现枕式食品包装机的多轴同步控制,实现同步控制过程中能够在干扰存在的情况下保证同步控制精度,基于径向基神经网络PID控制方法设计了一种多电机偏差耦合同步控制方法,通过PID补偿器实现电机的同步控制。
1 食品枕式包装机结构及工艺流程
1.1 枕式包装机的结构
枕式包装机结构如图1所示,该包装机主要由送料轴、包装膜、色标检测传感器、制袋器、纵封轴和横封轴等组成。

图1 包装机结构
1.2 枕式包装机工作流程
枕式包装机的工作流程主要由食品传送、包装膜传送、热风器加热和横封加热剪切等组成,其工作流程如图2所示。送膜轴牵引包装膜运动,块状食品由拨叉开关带动并传送到包装膜中,通过纵封成型器将物品传送到袋体中,经过抚平装置整理后再由横封加热装置完成横封和切断,最终将包装完整的产品输出到传送带中。

图2 包装机工作流程
2 包装机多轴同步控制器设计
为了实现食品包装机的包装精度,伺服枕式包装机的多轴同步控制至关重要。包装机在实际运行过程中,各轴需要相互配合完成送货、送膜、横封和横切等一系列动作。在包装机机械传送中由于在各轴中施加的负载并不均匀,从而导致轴伺服并不同步。因此,要使包装机各单元中的伺服电机实现同步运动控制,就需要采用合适的具有自适应性能的控制方法,通过智能的控制策略克服系统不同的干扰和不确定因素。
2.1 神经网络结构
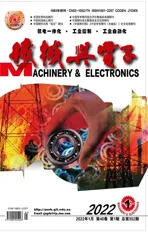
传统PID控制中PID参数并不会根据系统变化而进行调整,而对于复杂多变的多轴同步误差控制系统,如果参数始终不变,则控制跟随性以及鲁棒性显然不能满足控制要求。为了提高同步控制精度,本文设计了一种神经网络PID跟踪控制器,以实现控制系统的自适应能力,通过神经网络的自我学习能力,实现控制器参数的自动调节[7-10]。神经网络控制系统的原理如图3所示。每个伺服电机均由神经网络PID补偿器进行调节控制。图3中ω*为电机的目标转速;ω1,ω2,…,ωn为多个伺服电机的实际转速;TLi为负载转矩。基于神经网络PID的多伺服同步补偿控制系统,能够保证电机转矩在出现扰动时,使各轴速度偏差能够快速趋于0。
图3 控制系统原理
神经网络结构如图4所示,该神经网络主要包括输入层、隐含层和输出层。

图4 神经网络结构
由图4可以看出,隐含层中第i个神经元的输入为
(1)
其输出为
exp(-(‖wi-X‖×bi)2)
(2)
通过改变神经网络径向基函数阈值b实现对函数灵敏度的调节。神经网络的输出数学模型为
(3)
2.2 多轴同步控制器设计
传统PID中参数固定不变,本文为了实现跟踪控制的自适应性,需要对PID中的比例、积分和微分多个系统进行实时调整,系统同步误差为[11-12]
e(k)=r(k)-y(k)
(4)
k为采样序号。
PID控制器的输入为

(5)
e(k)、e(k-1)和e(k-2)分别为k、k-1和k-2时刻的偏差数值。
PID控制器的数学模型为
u(k)=u(k-1)+kPx(1)+kIx(2)+kDx(3)
(6)
u(k)和u(k-1)分别为k和k-1时刻控制器输出量;kP为比例系数;kI为积分系数;kD为微分系数。
神经网络的目标函数为
(7)
kP、kI、kD采用梯度下降法进行实时调整,即
(8)

3 仿真分析
为了验证本文设计的基于神经网络PID的多伺服枕式包装机多轴同步控制方法的有效性和抗干扰能力,采用MATLAB/Simulink仿真软件对控制器进行了仿真分析。
图5为系统在无干扰和参数固定不变的情况下,多轴同步仿真曲线,其中,图5a为跟随误差,图5b为同步误差。由图5可以看出系统跟踪误差和同步误差均能够在较短时间内收敛,由此也可以看出该算法的收敛速度较快且控制精度较高。

图5 系统无扰动仿真曲线
为了进一步验证本文多轴同步控制方法的抗扰动能力,在系统中引入了一个力矩突变,以观察该控制方法能否再次将同步误差收敛于最小值。图6为引入干扰情况下的仿真曲线,由图6可以看出当出现突变时,系统能够再次将跟随误差和同步误差控制在最小范围中, 收敛的速度较快, 由此可以看出本文的控制方法对于系统存在扰动时,仍能够保证快速的收敛性和鲁棒性。

图6 引入干扰时仿真曲线
4 结束语
以食品枕式包装机为研究对象,为了提高食品包装机的包装精度,提升包装质量,本文在分析了包装机的结构和工作原理的基础上,设计了一种基于神经网络PID的多轴电机同步控制系统。利用神经网络的自我学习能力,利用梯度下降法对PID参数进行自适应调整,进一步提高了控制系统的自适应能力。仿真结果表明,基于神经网络PID的多电机同步控制方法能够保证系统跟随误差和同步误差最小,且当系统出现扰动后,系统仍能够快速收敛且再次将系统控制于稳定。