城市轨道交通工程基于UWB定位的人机防碰撞技术研究
2022-01-25
(北京安捷工程咨询有限公司,北京 100050)
0 引言
由于轨道交通地下工程施工作业环境多变、工况复杂,且工程场地狭小、作业空间有限,在这样的作业条件下存在大量工序交叉施工,施工作业机械设备与作业人员不可避免地存在作业轨迹交叉,增加了施工作业机械设备碰撞施工人员的可能,进而导致人员伤亡、财产损失的安全事故[1]。
在施工现场,由于视线盲区、噪音、照明不足及扬尘引起的作业环境能见度低、疲劳驾驶等因素,机械设备司机往往难以掌握作业影响区周边其他人员的分布情况,司机在作业过程中存在较大的安全隐患。传统方法提出了一种以管制空域融合运行的高度层分类方法。该分类方法规范了无人机的分类方式,从而为无人机与有人机融合运行找到了共性,为无人机准入管制空域做出了条件准备,也为现有民航体系内建立无人机与有人机防碰撞模型提供了环境。对无人机管制间隔进行风险评估。但是该方法的数据精准度低,适用性差,对此,本文提出一种城市轨道交通工程基于UWB定位的人机防碰撞技术。
1 定位技术的选择
采用人员、设备无线定位技术可以解决人员机械设备防碰撞这一类问题。无线定位技术的原理,是通过测量无线电波的某些参数进行,并依据特定的算法,进行判断被测目标的位置[2-5]。
相对于室外空旷环境,在室内感知位置信息并达到一定精度是较为困难的,这是因为室内环境,包含各种物体的反射和信号的散射[6]。超宽带(ultra wide band,UWB)与其他定位技术相比,其性能高,如穿透能力强、精度高,更适合室内定位[7]。在贵重物品储藏、人员定位、机器人运动跟踪和汽车储物泊车等领域,超宽带室内定位和导航已实现室内精确定位以及导航,包括对室内静止或移动的物体和人体定位跟踪与导航[8]。目前,超宽带(UWB)在人机防碰撞方面,主要是通过安装在机械上的射频(定位基站)识别有源标签来检测行人的存在[9]。
2 定位功能的实现
在场区内安装定位基站,用于接收人员佩戴或机械设备安装的定位标签发送的极窄脉冲,从而确定人员或机械设备的坐标位置[10]。
2.1 定位模式选择
UWB无线定位模式分为4种:零维定位、一维定位、二维定位以及三维定位。场地较大的明挖基坑或断面较大的隧道工程可采用二维定位,如明挖车站和大跨度暗挖车站;断面较小的隧道工程科采用一维定位,如标准暗挖隧道和标准盾构隧道;作业区域狭小、遮挡严重或使用存在性检测即可的部位,可采用零维定位,如盾构机管片拼装区等。
2.2 基站安装
一维定位相邻基站安装间隔应在150 m范围内,二维定位相邻基站安装间隔应在50 m范围内。
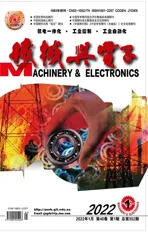
基站安装主要考虑因素是信号和遮挡,需要在避开遮挡的同时,保证信号传输精度。根据现场实测,明挖基坑场地范围内基站架设高度应在3~10 m,暗挖隧道及盾构隧道宜架设在拱腰以上不易被碰触的地方。基站尽量布设在同一水平高度,水平高度差不宜大于1 m。盾构机-管片吊装场地定位系统网络架构如图1所示。

图1 盾构机-管片吊装场地定位系统网络架构
2.3 网络部署
定位基站通过通用网线与POE交换机进行连接,POE交换机为定位基站供电并实现信号传输,1台POE交换机一般连接1~3台定位基站。
开阔场地的各POE交换机通过通用网线与汇聚交换机进行连接,实现POE交换机与汇聚交换机的信号传输。汇聚交换机与核心交换机通过通用网线直连,实现汇聚交换机与核心交换机的信号传输。
盾构机上的POE交换机通过专用光纤直连核心交换机,实现POE交换机与核心交换机的信号传输。该专用光纤选用6芯光纤,其中2芯常用作实时视频和定位基站的专用信号传输。
核心交换机通过通用网线与解算服务器进行直连,实现核心交换机与解算服务器之间的信号传输。
2.4 定位标签安装/分发
混凝土罐车和运渣车等行走类机械设备,在行走类机械设备的前、后方各设置1个定位标签,用于划定其沿行进方向的虚拟电子围栏。挖掘机等行走及旋转类机械设备,在行进方向的前、后方各设置1个定位标签,用于划定其沿行进方向的虚拟电子围栏;在上车中部/中央回转臂根部设置1个定位标签,用于划定挖掘机工作装置的回转虚拟电子围栏。长臂吊车,在行进方向的前、后方各设置1个定位标签,用于划定其沿行进方向的虚拟电子围栏;在起重臂的首、末端各设置1个定位标签,用于划定其水平投影方向的虚拟电子围栏;在吊钩上设置1个定位标签,用于划定吊钩影响范围的虚拟电子围栏。人员佩戴安全帽型定位标签,用于定位人员实时坐标位置和运动轨迹。
3 人机防碰撞告警的实现
虚拟电子围栏以定位标签为基准坐标,通过矩形及圆形来标记围栏边界,当人员或其他车辆侵入围栏边界时,通过人员佩戴的定位标签与机械设备虚拟电子围栏发生位置信息交互,判断碰撞可能,实现提前预警。即通过定位标签内置的报警装置或外接声光报警器对相关人员进行提示。
3.1 矩形电子围栏
假定机械设备按照中轴线左右对称。设机械设备前端的车载定位标签A的坐标为a(x1,y1);机械设备后端的车载定位标签B的坐标为b(x2,y2)。A标签距机械设备前端边缘估算距离为d1,距机械设备右侧边缘估算距离为l1,距机械设备左侧边缘估算距离为l2;B标签距机械设备后端边缘估算距离为d2,距机械设备右侧边缘估算距离为l3,距机械设备左侧边缘估算距离为l4。考虑到车载定位标签安装时的安全性和稳定性,以及考虑到机械设备本身的结构,定位标签安装时几乎不可能直接安装在机械设备的中轴线上。因此,需找到机械设备的计算中轴线。最后根据计算中轴线进行外扩,形成机械设备的计算外边界。矩形电子围栏的生成原理如图2所示。

图2 矩形电子围栏的生成原理
机械设备前后端外边界为
(1)
x为人机防碰撞的预警参数;y为人机防碰撞的预警信号;d为自适应参数。机械设备左右侧外边界为
(2)
l为特征分布函数。在机械设备的计算外边界的基础上外扩范围为Q1,形成电子围栏-报警边界;在电子围栏-报警边界的基础上外扩范围为Q2,形成电子围栏-预警边界。
设人员佩戴定位标签的坐标为p(x5,y5)。p点距直线y‴=k4x+b4和直线y″″=k5x+b5的距离分别为:
(3)
(4)
k为人机防碰撞精准度;b为人机防碰撞边缘节点。人员闯入电子围栏的判别:当L≤(l+Q1+Q2)且(d+Q1) 假定车载电子围栏安装在接近旋转部件的旋转轴心部位。设机械设备旋转部件轴心附近的车载定位标签C的坐标为a(x0,y0),旋转部件臂长水平最大投影距离为d0。根据计算中轴线轴心坐标外扩距离d0,形成旋转部件的计算外边界。圆形电子围栏的生成原理如图3所示。 旋转部件的计算外边界为 (5) 以C定位标签a(x0,y0)为圆心,R1为半径,形成电子围栏-报警边界;以C定位标签a(x0,y0)为圆心,R2为半径,形成电子围栏-预警边界。 设人员佩戴定位标签的坐标为p(x1,y1)。p点距C定位标签a(x0,y0)的距离为 图3 圆形电子围栏的生成原理 (6) R为人机防碰撞的故障辨识系数。人员闯入圆形电子围栏的判别:当R≤R2时,判定人员闯入旋转部件虚拟电子围栏-预警边界,并触发预警;当R≤R1时,判定人员闯入旋转部件虚拟电子围栏-报警边界,并触发报警。 设定位标签的传输信号频率为2 次/s(即传输间隔为0.5 s);信号传输延迟为0.5 s;人员最快行走速度为v1=1.5 m/s;正常行走速度为v2=1 m/s;机械设备在场内最快移动速度为v3=5.5 m/s;一般移动速度为v4=2.8 m/s。考虑最不利情况,触发电子围栏的最大延迟t=1 s。 人员最快行走与机械设备最快移动情况下的围栏界限为Q′=(v1+v3)t=8 m。人员正常行走与机械设备一般移动情况下的围栏界限为Q″=(v2+v4)t=3.8 m。人员静止与机械设备一般移动情况下的围栏界限为Q‴=v4t=2.8 m。 机械设备根据车载定位标签坐标,生成2级告警围栏。以人员正常行走与机械一般移动情况下的围栏界限作为预警界限;以人员静止与机械一般移动情况下的围栏界限作为报警界限。 矩形电子围栏告警界限取值:在机械设备计算外边界的基础上外扩范围为Q1=Q′=2.8 m,形成电子围栏-报警边界;在电子围栏-报警边界的基础上外扩范围为Q2=Q″-Q‴=1 m,形成电子围栏-预警边界。 圆形电子围栏告警界限取值:以C定位标签a(x0,y0)为圆心,R1=d0+Q‴=d0+2.8 m为半径,形成电子围栏-报警边界;以C定位标签a(x0,y0)为圆心,R2=d0+Q″=d0+3.8 m为半径,形成电子围栏-预警边界。 行走类机械设备:在机械设备行进影响范围(机械设备计算外边界)外一定范围(Q1+Q2)的矩形区域设置二级碰撞预警围栏;在机械设备行进影响范围(机械设备计算外边界)外一定范围(Q1)的矩形区域设置一级碰撞报警围栏。 旋转类机械设备:在机械设备回转影响范围(回转计算外边界)外一定范围(R2-d0)的圆形区域设置二级碰撞预警围栏;在机械设备回转影响范围(回转计算外边界)外一定范围(R1-d0)的圆形区域设置一级碰撞报警围栏。 机械设备在移动的情况下,电子围栏启动;机械设备在静止的状态下,电子围栏关闭。 为了测试本文方法在实现UWB定位的人机防碰撞技术的应用性能,进行仿真测试,在进行仿真验证之前,需要对无人机和障碍物进行标定,通过运动跟踪软件 Motive实现,在摄像机标定完成后,再将反光贴到无人机上,方便跟踪。执行初始化处理操作,数据采集单元激活。采用MATLAB软件进行仿真,障碍共有5个,所处位置分别为(30,35)、(65,60)、(90,100)、(75,20)和(40,105),半径为10 m。假设UWB定位的人机防碰撞的参数设置为k5x5-y5+b5。根据上述参数设置,实现人机防碰撞的技术融合,得到人机防碰撞定位系统误差如图4所示。 图4 人机防碰撞定位系统误差 根据图4所示,传统方法的定位系统误差最高达到70%,而本文方法的定位系统误差为9%。由此可知,本文方法的定位误差更低,所研究的技术更稳定。测试人机防碰撞技术得到传输数据精准度分析如图5所示。 图5 人机碰撞数据传输精度对比结果 根据图5得知,本文方法的数据传输精度高达80%,传统方法的数据传输精度为23%。本文方法的数据传输精准度明显高于传统方法,由此可知,本文方法的人机碰撞技术更具有效性,且适用性更强。 通过安装在机械设备上的车载定位标签,实时生成虚拟电子围栏,在保证定位精度的前提下,与安装在机械设备上的定位基站生成电子围栏相比,有效降低了投入成本、维护成本,尤其在复杂工况下存在多个交叉虚拟电子围栏时,其优势明显。若定位基站覆盖范围广,在场区内的所有大型机械设备安装车载定位标签后,可同时监控覆盖范围内的所有人员、机械设备,对碰撞预防效果明显,不留死角。同时,通过定位标签生成的虚拟电子围栏,在触发碰撞报警时,报警信息可以通过场区定位基站所处局域网,实时同步到解算服务器和后台系统,实现远程监督、控制和数据存储、分析。城市轨道交通建设工程施工现场采用基于UWB定位实现人机防碰撞,是实现施工现场精准定位、智能计算和及时预警的积极尝试,为避免现场复杂工况下人员与施工机械设备碰撞、挤压和碾压等事故的发生,提供了新的解决思路。3.2 圆形电子围栏

3.3 电子围栏界限范围的确定
3.4 人员机械防碰撞的告警设定
3.5 机械设备电子围栏的启停


4 实验分析


5 结束语