基于偏差校正的汽车安全气囊系统自动校准方法
2022-01-25
(上海机动车检测认证技术研究中心有限公司产业计量中心,上海 201805)
0 引言
汽车安全气囊系统包括气囊、控制器、发生器和传感器等,通常气囊和发生器等在一起构成气囊模块,但由于汽车的长时间行驶和颠簸,会造成安全气囊系统的外部和内部出现偏差,导致在事故发生时,无法准确释放气囊,不能减少碰撞对乘员的损伤。针对上述问题,本文提出一种基于偏差校正的汽车安全气囊系统自动校准方法。
1 汽车安全气囊系统故障状态诊断
汽车安全气囊系统的偏差故障状态诊断难度较大,因此,本文通过读取自诊断系统的故障代码,诊断气囊状态。打开点火控制开关时,如果安全警示灯亮起6 s之后熄灭,表明安全气囊处于正常状态;如果不熄灭,表明警示灯在显示故障代码,需要对代码特征提取;如果警示灯不亮,表明警示灯电路存在故障。在检测前,首先需要排除电路故障,随后确认是否存在故障代码。
汽车安全气囊自诊断系统以安全警示灯出现闪烁次数为依据,故障代码[1]读取流程如下所述。
关闭点火等待10 s,随后将安全气囊插头插入维修检测2P插头中。开启点火开关,安全气囊警示灯大约会亮起6 s后熄灭,随后警示灯闪烁读取故障代码,故障代码大多由主码与子码构成。如果出现重叠性故障,那么警示灯会重复出现故障代码;如果故障为间歇性,那么警示灯只会显示当前故障代码,然后常亮;如果2种故障情况都存在,那么警示灯会显示为连续性故障代码。
2 汽车安全气囊系统自动校准
2.1 汽车安全气囊系统外部校准
根据汽车安全气囊系统状态诊断结果进行外部故障校准,对于外部故障,如电路故障、电源故障、充气机短路、电阻增加和导线短路[2]等,需要通过调整前束尺寸,来获得线路校准有效距离。
在进行汽车外部故障校准的过程中,需要调整前轮前束的距离,才能够让维修人员进入汽车前端的维修区域进行检修,通常需要多次调整与测量才能够获得所需要的前束值[3]。因此,本文通过一种简单的测量与运算方法,对前束进行调整,只需要一次调整,便能够获得精确的前束值。以普通汽车为例,本文算法的计算过程如下所述。
a.设定前轮前端胎面中心线距离为A;调整后的距离为A1;后端中心线距离为B;调整后的距离为B1。则前束为正值的运算方法为:
(1)
(2)
C=B1-A1
(3)
其中,C为前束值。
b.前束为负值的运算方式为:
(4)
(5)
C=B1-A1
(6)
通常使用可伸缩的精度为1 mm的前束尺进行前束测量,仅需一个人就能够一边观测B1或A1的测量值,一边调整横拉杆[4],实现前轮前束值的调整,获取线路校准有效距离。在调整完前束值之后,依靠外部维修人员对汽车安全气囊系统位置的外部偏差进行校准。
2.2 汽车安全气囊系统内部校准
汽车安全气囊系统[5]的内部校准主要为点火校准,目的是为了让汽车安全气囊可以精确点火,防止漏电误点火与迟点火问题出现,避免安全气囊的弹出或防护机制产生错位。因此,需要对安全气囊点火时刻进行自动校准,以提高乘员生命安全。
2.2.1 安全气囊点火时间确定
将汽车碰撞安全性标准FMVSS208作为乘员伤害评价指标,由于安全气囊系统具有特殊性,导致在进行安全气囊系统的校准前,需要对乘员的加速度、腿部力量、头部损伤和气囊可能对乘员造成的损伤值H进行评估[6]。
损伤值的定义函数为
(7)
t2和t1分别为信号延迟时间。
在校准汽车安全气囊系统点火误差前,还需要计算模型人、安全带、气囊、座椅之间的震动特性,获取乘员和气囊间存在的相互作用力、面积和时间等信息,方便分析气囊自身的热力过程。当出现碰撞时,气囊在充满气体后,其背部会开启1个小孔,用于释放气囊内的气体,同时承受乘员冲击和缓冲,减少力对乘员的伤害。因为乘员存在坐姿随机性,导致气囊与乘员之间的作用点也是随机的,若想要精准校准点火时刻,就需要研究气囊整体的作用过程,获取气囊和乘员之间存在的相互关系。
因为坐姿和碰撞点的随机性,想要确定气囊的点火时刻[7]是比较困难的问题,同时由于气囊的膨胀存在随机性,导致不能广义上获得所有汽车的目标点火时刻。因此,本文使用经典的5 in-30 ms作为标准点火时刻。该标准为:当出现碰撞时,乘员会惯性向前移动5 in,因此,汽车安全气囊的最佳点火时间为30 ms内点火。
拟定横坐标为时间轴,纵坐标为乘员位移的坐标系,位移即为乘员在不同方向位移[8]的总和。汽车在刚出现碰撞时为0时刻,此刻乘员的位移也是0,在延迟t1时间后点火时刻为t3,t3=t2-30 ms,通过该运算便能够得到安全气囊点火时刻的最佳时间。
2.2.2 安全气囊点火自动校准算法
点火最佳时刻确定后,对于安全气囊系统延迟校准方法存在很多种,但都面临着实时性差或者过于针对某一种车型,适用性差。为此,本文采用2种校准方法协同处理气囊点火校准问题。
a.移动窗式积分方法。拟定减速曲线[9],在减速曲线a(t)内取时间窗[t-w,t],w为时间窗的宽度,计算a(t)下[t-w,t]内的积分为

(8)
移动窗式积分方法的理念:对前w时间内的点火信号积分计算,获取指标s(t,w),在该指标等同于上述最后点火时刻t3时,发出点火信号[10],反之继续进行处理与比较。
b.ARMA模型预报方法。汽车安全气囊的点火时刻校准作为一种预报校准问题,只有在乘员处于30 ms时刻、位移出现5 in时,气囊才会准时点火。因此,校准的重要点为通过当前信号,预报30 ms后乘员头部位移,将结果作为校准的需求。根据上述运算出的最佳点火时刻和移动窗式积分指标,把安全气囊拟定成输入输出[11](SISO)线性系统,同时输入最佳点火时间与汽车加速度曲线,算法就可以自动运算出乘员的头部位移与偏差校准点火时刻。
设定u(k)为车身加速度;z(k)为头部位移;G(z-1)为头部位移与车身加速度的关系模型,其表达式为
(9)
乘员头部的位移除了会被汽车加速度影响外,还会被安全带所影响,因此把这些因素都拟定为噪声n(k)。在关系模型[12]组建完成之后,便能够依靠试验数据库辨别模型的参数,以此剔除在校准过程中出现的外部干扰因素。
3 实验验证
为了验证本文方法的实用性,进行仿真实验,实验使用MATLAB6.5神经网络工具箱函数,编程模拟汽车安全气囊系统。
3.1 汽车加速度与乘员位移分析
以CA1091型汽车作为实验目标,对该汽车进行2次不同强度的碰撞模拟实验,依靠本文方法获取2条不同碰撞强度下的加速度曲线42 km/h和64 km/h,结果如图1所示。
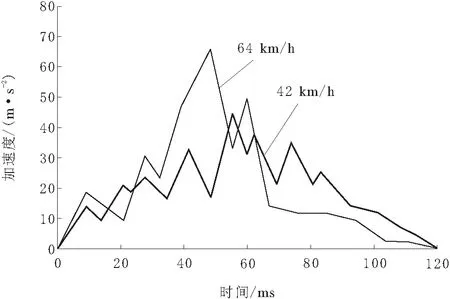
图1 加速度曲线
依靠损伤定义公式(7),计算出乘员的头部位移曲线,结果如图2所示。能够看出,图1内40~60 ms内2条曲线的加速度最大,与图2所示的头部最大位移区间一致,说明本文方法能够得出准确加速度曲线和乘员头部位移结果。

图2 乘员头部位移曲线
3.2 汽车安全气囊点火时刻分析
通过乘员头部位移给出的点火阈值,确定点火最佳时刻,结果如图3所示。
从图3能够看出,本文方法能够较好地区分气囊最优点火时刻与非点火时刻,实现了对汽车碰撞状态的及时判断。这种判断能力,可以为乘员提供良好且有效的保护。
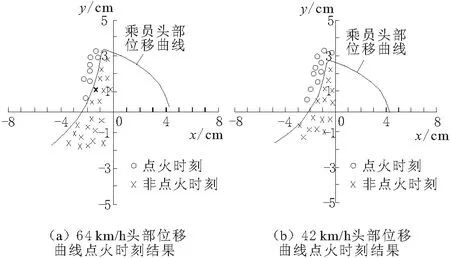
图3 安全气囊点火时刻确认
3.3 汽车安全气囊系统自动校准效果分析
从上述2种汽车加速度曲线内提取64 km/h曲线作为评测目标,在产生碰撞时,未校准的汽车安全气囊系统的点火时间和效果,如图4所示。

图4 汽车安全气囊系统点火时间
从图4能够看出,气囊的点火时刻是出现碰撞后的36 ms。依靠本文方法设定的点火时刻准则分析,确定该气囊的最佳点火时间是30~32 ms。依靠对比可知安全气囊系统的最佳点火与实际点火之间存在4~6 ms的差距。依靠本文方法对上述点火时刻的偏差进行校准,结果如图5所示。

图5 汽车安全气囊系统点火校准结果
从图5能够看出,本文方法在32 ms时发出点火信号,缩小了与最佳点火时间的误差,提高了乘员安全性。通过计算汽车的加速度与出现碰撞后乘员的头部位移,确定最佳的点火时刻区间,最后再依靠ARMA模型预报,实现对安全气囊系统的偏差自动校准工作,大大强化汽车安全性能。
4 结束语
为了提高汽车驾驶人员的安全防护性能,提出一种基于偏差校正的汽车安全气囊系统自动校准方法,该方法通过调整前轮前束与控制安全气囊点火时刻,来实现自动校准。但本文的研究主要处于相对稳定的环境下,受外界干扰较小,如果想要将本文方法应用到汽车安全气囊系统的生产线内,完成连续的自动化校准,还需要进一步添加深度学习算法,使其能够适应不同的工作环境,提升算法的可靠性与稳定性。