智能驾驶技术在农业机械上的应用与发展趋势
2022-01-25毕亚娟
毕亚娟
(青冈县农机综合服务中心,黑龙江 青冈 151600)
0 引言
随着我国农业由传统的粗放型生产向着精细化作业模式转变,农业生产中对农机的自动化和智能化提出了新的要求,在农业生产过程中,农业机械的精细化作业必须要以合理的行驶控制作为基础。目前的农机驾驶主要依靠驾驶员操作,驾驶员在驾驶农机的过程中不仅要负责农机行驶,同时还要兼顾地表状态、农作物生长情况、病虫害情况等众多信息,很难完全保证农业机械按照最合理的方式行驶。人工驾驶农机的行驶路线在直线性和位置偏差方面局不尽人意,在机械化耕作、播种、施肥、插秧等作业过程中很容易出现作业遗漏或重复作业等问题,导致生产质量的下降。近年来,自动驾驶技术在我国取得了快速的发展,部分技术已经在汽车驾驶方面进行了试验与应用,而对于农业机械而言,也应积极结合现代化的驾驶技术对农机驾驶系统进行改造与升级,以此促进农机精细化作业程度的进一步提升。
1 农机智能驾驶的定义
智能驾驶是在人工智能技术的基础上进行研究和发展的,其主要依靠自动控制技术、计算机技术、卫星定位技术、通信技术等进行实施。农业机械智能驾驶技术是农业机器人技术研究的一个分支,农业机械在田间行驶过程中能够以卫星定位、视觉技术、传感器技术等获取生产环境的相关信息,并模拟成为类似于人类的感知系统,结合计算机人工智能技术对行驶方式进行智能判断,再利用自动控制技术控制农机的行驶速度和转向、刹车等操作,从而有效替代人工驾驶,并使驾驶逻辑更为科学。智能驾驶技术的实施,主要依靠农机行驶主体、视觉识别系统、GPS系统、传感器系统、自动控制系统、逻辑计算系统等几大部分来配合实现,如图1所示。
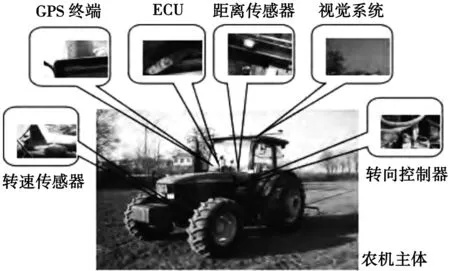
图1 农机自动驾驶技术的组成
2 农机智能驾驶技术研究情况
我国对于农业机械的自动导航驾驶技术的研究起步于20世纪90年代,主要的研究是借鉴美国和日本等发达国家的相关机械技术,其主体自动驾驶技术的思路是以农机导航技术控制农业机械的自动行驶,但农机驾驶技术的快速发展主要集中于2009年以后,随着我国的农业机械技术得到快速发展,很多先进的其他学科纷纷加入到农业机械的功能研究之中,使农业机械在自动化程度上得到了显著提升,在自动驾驶方面,国内学者以农机技术为基础进行了大量的研究和产品开发工作。张智刚等[1]开发了基于 DGPS 和电子罗盘的导航控制系统使农机行驶的控制误差得到明显优化;罗锡文等[2]设计的 DGPS 自动导航控制系统实现了拖拉机直线行驶作业最大误差小于 0.15 m;伟利国等[3]将RTK-GPS应用到水稻自动化插秧设备的研究中,使水稻插秧机对行行驶效果显著提升;刘卉等[4]设计了基于GPS的农机作业重漏程度评估方法,并在小麦收获、施肥等作业中进行试验,有效提高了农机作业评估质量。
3 智能驾驶技术在农机中的应用
3.1 线路规划与行驶路线检测
随着GPS定位技术在先进的农业机械中进行应用,以大马力拖拉机、联合收获机等为代表的先进农机产品都配备了卫星定位终端(图2),先进定位技术在农业机械上的配套使现阶段的农机驾驶和管理工作得到了显著提升。一方面,尽管现阶段很多农业机械还不能实现彻底的自动化驾驶要求,但是在智能软件的配套下,农机驾驶员可以根据卫星定位的功能利用软件生成最合理的行驶路线,并在农机行驶过程中利用定位和导航技术实时监控,及时提醒和纠正行驶偏差问题,保证农机作业的合理性;另一方面农机管理部门对于农机深松、免耕播种等作业能够利用农机的定位和信息技术等功能实现作业面积自动评估,有利于补贴资金的合理化发放。

图2 北斗卫星定位终端
3.2 农机的自动行驶和自动作业
近年来,农业机械的自动驾驶和智能作业技术发展较快,以中国科学院、中国农业科学院为代表的科研团队在我国很多地区建立了无人智能农场示范点,以农机智能驾驶技术为基础,基本上能实现农业生产各个过程的全自动化作业。农业机械通过先进的定位、视觉、传感器等技术实现环境感知、路径规划,并按照设计好的程序执行相应的农机作业任务。现阶段的智能驾驶技术在农机自动化作业上的应用功能包括:农业机械自动化耕整地、农业机械自动化播种、农业机械自动植保、农业机械自动收割等。只是这些先进的智能驾驶和作业技术在我国还没有达到普及和应用的能力,而在美国、日本等发达国家已经逐步实现了农场智能化作业。
3.3 农业机器人技术的应用
现阶段我国对农业机器人技术已经进行了大量的研究,而农业机器人的应用却主要集中于欧美、日本等发达国家,例如美国农机企业已经有相关的机器人产品在市场销售和应用,Aboundant Robotics是一款苹果采摘机器人(图3),能够实现在不破坏苹果树和苹果的前提下达到平均每秒采摘一个苹果的工作效率。

图3 Aboundant Robotics水果采摘机器人
4 智能驾驶技术的应用难点
4.1 智能驾驶的环境条件不具备
我国的农业生产基础设施建设相对不足,对于智能驾驶的农业机械,作业质量与农田环境关系很大,一方面,我国农田环境复杂,耕地存在地形不规整、地势不平、田间障碍物多等很多不利因素;另一方面智能驾驶的农机作业需要依靠网络、卫星定位等多重技术,而农田作业常存在网络信号不良或无信号、卫星定位精度不高等问题。以上两方面原因造成了农机自动驾驶应用中行驶路线不准确,需频繁避障,不良路况农机易损坏等问题。
4.2 对智能农机的管理能力不足
尽管智能农机实现了无人化作业,但智能农机的日常使用对于保养维护的要求更高。而对于我国农民而言,对于智能农机的管理能力明显不足,表现在以下几方面,一是对智能农机的日常调校能力不足,智能农机不仅需要机械部件的维护调整,还需要对作业方案与控制系统进行维护调整,我国农民在此方面的能力严重缺失,单纯依靠售后服务技术维修不利于实现农机的长久高效使用;另一方面,智能农机结构与技术更为复杂,农民的维护保养能力不足,定期保养意识欠缺,都不利于智能农机技术的应用。
4.3 对智能农机购买能力不足
尽管近年来我国农民的经济能力明显提升,但是对于先进农机的购置能力仍然明显不足,而对于智能农机而言,其生产成本进一步提高,导致其销售价格也大幅增长,单就自能驾驶农机而言,由于具备了自动驾驶技术,大量先进电控元件的应用不仅提高了其售价,也导致其在日常使用过程的成本上升。一方面,为更好的保护智能农机,农民需要为其提供合适的库棚存放,并为其智能行驶作业提供更高的维护费用;另一方面,自动驾驶农机的定期保养主要依靠上门服务,导致服务收费相应增加。总体而言,智能农机的推广需要我国农民具备更强的经济实力。
5 我国农机智能驾驶技术发展趋势
5.1 在逐步应用的过程中实现发展
一方面我国很多先进的智能驾驶技术和相关辅助的学科技术已经具备了相应的智能农机开发能力,另一方面国内农村地区的农业机械购置、应用条件和农机市场还不能完全满足具有智能驾驶技术农机产品的大规模应用,因此农业机械的智能驾驶技术应在技术研究过程中逐步进行应用推广,例如将智能辅助驾驶技术、自动作业技术与人工驾驶形式相配合进行推广,一方面提高农业机械现阶段的作业合理性,另一方面使农机的智能驾驶技术逐渐被农民所接受,有利于全智能化驾驶的农机产品在未来的顺利推广。
5.2 在条件适宜地区加强智能驾驶技术的应用
实际上,国内很多关于智能驾驶技术的研究已经基本上达到了应用的条件,因此在地理条件良好、配套设施齐备的农场和现代化大棚等农业生产环境,可逐步推广具有智能驾驶技术的农机产品,只有将智能驾驶技术逐步推入市场,才能在农业生产实践中实现该技术的优化和提升,也更有利于智能驾驶技术与我国农业生产实际相结合,帮助其实现更合理的发展与快速应用。
5.3 功能研究与基础设施建设同步发展
智能驾驶农机应用的一个先决条件就是农村地区的基础设施建设要能满足智能农机作业的需求,这就要求农业生产条件逐渐向有利于智能农机应用的方向转变,例如为智能驾驶农机建设田间道路、GPS基站、通讯设施等,以便于在农机智能驾驶技术产品逐渐成熟的同时,农村的生产条件也能很好的对新农机产品的应用提供平台,确保先进农机真正得到快速应用。
6 结语
随着我国科学技术的快速发展,自动驾驶技术也将很快在农业机械上得到应用,而人工智能与自动驾驶技术的深度融合将进一步提高农业机械作业的科学性和便捷性,也将是农机产品技术升级的主要方向之一,智能驾驶技术的应用需要在科技、农村管理、农田建设、农民认识等很多方面进行努力和提升,以此确保农业机械技术得到快速科学的应用和发展。
(05)
