GPS导航电文核心定位参数发展演变分析
2022-01-24常志巧辛洁时鑫黄双临邵佳妮
常志巧,辛洁,时鑫,黄双临,邵佳妮
( 32021部队, 北京 100094 )
0 引 言
全球卫星导航系统(GNSS)空间信号接口控制文件定义了导航电文的内容、编排结构、编码方式、播发方式以及用户算法等信息[1],是连接导航系统空间段和用户段的桥梁. 依据该文件,用户接收机完成伪距测量、导航电文解析,根据提供的导航算法进行定位解算. 各大卫星导航系统在正式提供服务前,都需要对外界发布相应的接口控制文件.
GPS是世界最先建成并投入使用的卫星导航系统,现有导航电文类型包括传统导航电文(LNAV:legacy navigation)和新型民用导航电文(CNAV: civil navigation、CNAV-2),其他卫星导航系统导航电文以GPS导航电文为基础发展而来. GPS现有IS-GPS-200、IS-GPS-705和IS-GPS-800 三种空间信号接口控制文件系列. 早在1983年1月25日,GPS官方发布了空间信号接口控制文件初始版本ICD-GPS-200[2],该文件定义了最初3种传统信号L1CA、P1、P2的空间信号接口. 为了适应GPS现代化增加民用信号L2C的需求,2004年11月23日,在ICD-GPS-200的基础上增加了民用中等长度码(L2CM)和民用长码信号(L2CL)的接口定义,并正式更名为ISGPS-200[3],现有最新版本为2020年8月3日发布的IS-GPS-200L[2]. 为了满足用户的生命安全需求,Block IIF及其后续卫星都规划播发L5民用信号[4],该信号的空间信号接口在IS-GPS-705系列文件中定义,自2003年11月24日发布初始版本后,随后历经A~G 7个版本,目前最新版本为2020年8月3日发布的IS-GPS-705G[5]. GPS现代化规划在GPS III/ IIIF卫星的L1频点增加全球兼容信号L1C[4],官方于2003年11月24日发布了L1C空间信号接口文件的初始版本,随后历经A~G 7个版本,目前最新版本为2020年8月3日发布的IS-GPS-800G[6]. 2018年12月随着第一颗GPS III发射升空[4],伴随着L1C信号接收试验,IS-GPS-800G得以启用.
GPS导航电文类型包括传统导航电文和民用导航电文,表1列出了GPS现有在轨各类卫星播发的导航信号、导航电文类型及对应的空间信号接口文件系列.
由表1可知,传统GPS信号的电文类型采用LNAV,GPS现代化增加的民用信号L2C和L5采用CNAV类型,新增民用信号L1C采用CNAV-2类型.
1 GPS导航电文结构及播发方式
调制在C/A 码及P(Y)码上的传统导航电文LNAV采用固定帧结构,以“帧”为单位,按固定顺序依次向外播发. 一个主帧的长度为1 500 bit,电文的播发速率为50 bit/s,播发一个主帧的电文需30 s. 一个主帧包含5个子帧,每个子帧的长度为300 bit,播发时间为6 s. 其中第一、二、三子帧播发卫星钟差、TGD参数、星历参数等基本定位信息,第四、五子帧各有25个不同的页面,可依次提供电离层参数、UTC参数及其他卫星的历书等相关信息. 每隔30 s,播完一个主帧,用户获得第一、二、三子帧完整的基本定位信息,第四子帧和第五子帧将依次翻转1页.第四子帧和第五子帧在播完25页后再从头开始播发,用户需花费12.5 min来接收一组完整的导航电文. 这种固定帧结构被大多数卫星导航系统采用,如GLONASS导航电文[7]、Galileo F/NAV和I/NAV导航电文[8]、北斗D1和D2导航电文,这些导航电文与GPS LNAV在播发顺序方面存在差异[9].
调制在L2C和L5上的CNAV导航电文采用数据块结构,以300 bit为一个基本电文数据块向外播发,每条信息包含24 bit冗余校验位对整帧电文进行检核. L2C播发一条数据块需要12 s[2],而L5只需6 s[5].CNAV导航电文中共有15种不同形式的电文类型,系统功能扩展可通过定义新的数据块类型来实现,具有很好的灵活性. 电文类型的播发顺序可以采用随机的方式,但通常需要考虑向用户提供最优服务. 在ISGPS-200和IS-GPS-705空间信号接口控制文件中具体定义了星历参数类型10和11、卫星钟差参数类型30~37中任意类型的最大更新周期,其余电文类型在保证不超过各自最大更新周期的前提下插空播发. 北斗三号(BDS-3) B2a信号播发的B-CNAV2电文也采用GPS CNAV这种数据块结构,与GPS CNAV在信息速率方面存在差异[10].
调制在L1C上的CNAV-2导航电文,采用固定帧和数据块结构相结合的混合帧结构[11],一个主帧由3个不同长度的子帧构成,前2个子帧按照固定顺序发播,第三子帧根据系统需求随机发播[6]. 第一子帧发播时间间隔信息;第二子帧发播广播星历、星钟信息、卫星群延迟参数和完好性参数;第三子帧发播电离层参数、UTC参数、历书参数等辅助信息,允许不同页面的发播顺序随机,既满足核心定位参数播发的固定性和辅助信息播发的灵活性. 在电文内容上CNAV-2与CNAV基本一致[9]. BDS-3 B1C信号播发的B-CNAV1电文也采用GPS CNAV-2这种混合帧结构[12].
2 核心定位参数的发展演变
GPS在系统建设和早期运行阶段,定位精度通常为几十米量级,LNAV中卫星星历和钟差表达精度在分米量级即可满足性能需求. 随着GPS的发展,地面控制系统可以获得更高精度的卫星轨道和钟差结果,用户可以获得米级甚至分米级的定位精度. 这就要求在新导航电文中设计新的模型和工程接口适应高精度定位需求.
2.1 卫星星历参数
GPS传统导航电文LNAV采用开普勒轨道根数及其摄动变化量组成的星历参数,包括1个参考时刻、6个参考时刻的开普勒根数、6个短周期调和改正项振幅、3个长期项改正数共16个参数. 考虑到半长径和偏心率在地球非球形引力项J22的影响下存在长周期变化,CNAV及CNAV-2新型民用导航电文在原来16参数的基础上,引入半长径长期变化率A˙以 及与半长径相关的Δn˙0[13],使星历拟合精度得到提高[14]. 同时,精化了大部分参数的比例因子,增加了比特数,以便更精确地描述卫星轨道. 在新导航电文中取消了星历参数版本号IODE,增加卫星钟、星历和完好性(CEI:Clock, Ephemeris, Integrity)数据序列预报时刻top, 当卫星星历、钟差等电文中的top一致时,表示同一时刻上注的电文参数,可以联合使用,星历参数如表2所示.
2.2 卫星钟差参数
新型民用导航电文钟差修正模型仍然延用
LNAV二阶多项式模型,各参数的比例因子和比特数有变化,除钟差参数参考时刻量化单位从16增大至300,比特位从16降低至11位,其余af0、af1、af2卫星
钟偏差、卫星钟漂移、卫星钟漂移率参数的量化单位减小,比特位增加,可以更精确的描述卫星钟差,GPS卫星新旧钟差对比如表3所示.
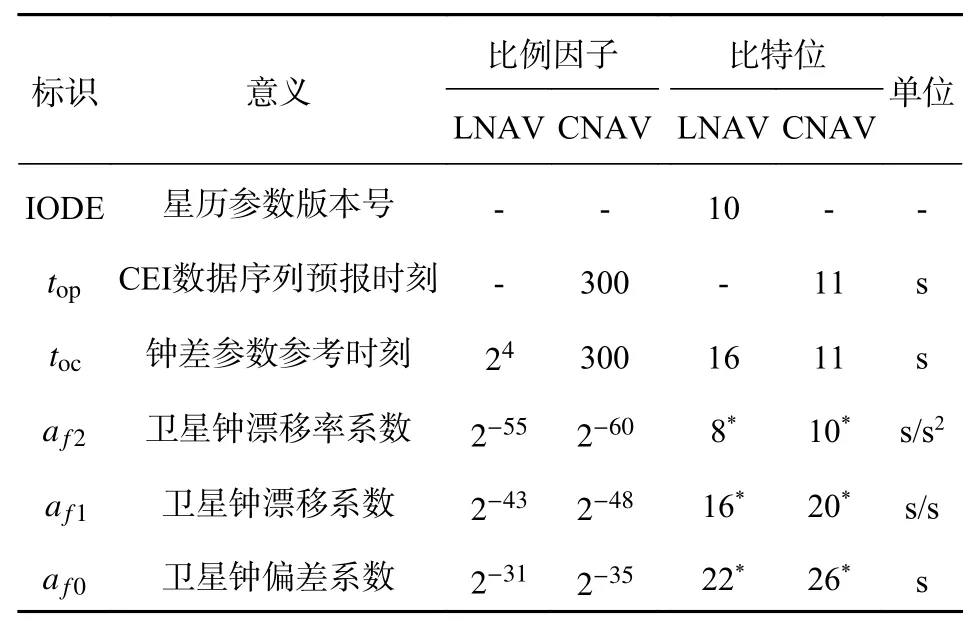
表3 GPS卫星新旧钟差参数对比
2.3 卫星群延迟参数
在LNAV电文中卫星群延迟只有1个参数TGD,在CNAV导航电文中增加至5个参数,分别为TGD、ISCL1C/A、I SCL2C、I SCL5/I5、I SCL5/Q5;在CNAV-2导 航电文中增加至3个参数,分别为TGD、I SCL1CP、I SCL1CD.在CNAV和CNAV-2电文中同时将群延迟参数的比例因子由0.5 ns精化至0.03 ns,表达范围由±60 ns调整至±119 ns,描述卫星群延迟更加精确.
2.4 用户测距精度指数
GPS用户测距精度(URA)是特定卫星特定信号测距精度的统计指标. URA提供用户测距误差(URE)保守均方根(RMS)估计,包括空间段和地面控制段引起的误差. 无论完好性标志是否打开,4.42倍URA以每小时1-(1 ×10-5)的概率(“传统”完好性保证水平)包络瞬时URE,告警时间小于8 s[1,5-6].当完好性标识打开时,5.73倍URA以每小时1-(1×10-8)的概率(“增强”完好性保证)包络瞬时URE,告警时间小于5.2 s[1,5-6]. 对任一URA指数(N),用户可以利用ICD中提供的公式计算名义URA.
在LNAV电文中用户测距精度用URA指数1个参数表示,由4 bit组成,其取值为0~15,在新型民用导航电文中,对用户测距精度参数进行了扩充,扩展为由星历引起的测距精度URAoe指数和卫星钟引起的测距精度指数(URAoc指数、URAoc1指数、URAoc2指数)共4个参数. URAoe指数和URAoc指数各占5 bit,表示范围也从原来的0~15扩展为-16~15,当指数取值为1~15时,其含义与传统电文相同,但把传统电文中N=0的情况细分为16个等级,分别用0~-15来表示,以适应精度提升需要. URAoc1指数和URAoc2各占3 bit,表示范围为0~7.
从IS-GPS-200F、IS-GPS-705B、IS-GPS-800B开始的所有文件规定URA由高度角相关的URAED和与高度角不相关的URANED的RMS组成. 用URAED指数代替URAoe指;URANED0指数代替URAoc指数;URANED1指数代替URAoc1指数;URANED2指数代替URAoc2指数;并优化了完好性指数与URA映射表达式.
3 核心定位参数改进效果分析
3.1 卫星星历参数的改进效果分析
利用2013年北斗中轨道(MEO)卫星通信系统全年的精密星历(轨道参数与GPS卫星相近)分别进行新旧星历参数拟合试验,星历拟合采用4 h拟合弧长,采用滑动窗口的方式,每1 h拟合1次. 图1~2分别给出了旧、新电文星历拟合误差RMS序列.

图2 新电文星历拟合RMS序列
表4 ~5分别给出了旧、新电文星历拟合RMS统计. 对比表4和表5,可得新星历相对于旧星历拟合位置误差RMS平均值由0.137 m减小为0.025 m,拟合URE RMS平均值由0.053 m减小为0.010 m.为适应高精度星历拟合模型,距离量化单位也减小至毫米量级.
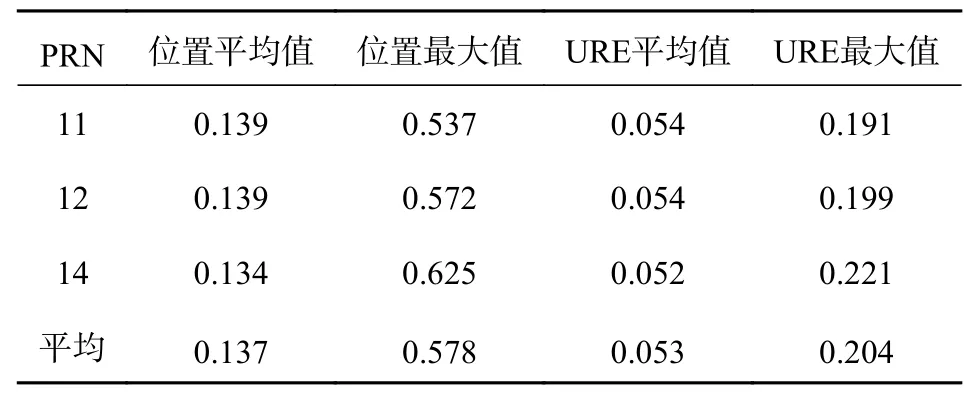
表4 旧电文星历拟合RMS统计 m

表5 新电文星历拟合RMS统计 m
3.2 星钟差参数的改进效果分析
利用MATLAB工具仿真产生0~0.5的随机数,分别与新、旧导航电文卫星钟差参数的量化单位误差相乘,获得量化误差,设置钟差预报时间为1 h,分别求出新、旧导航电文由钟差参数量化单位误差引起的钟差预报误差. 图3给出了1 000次试验中,新、旧电文卫星钟差参数量化单位引起的预报误差对比.统计1 000次预报结果获得旧电文钟差预报误差RMS为0.097 m,新电文RMS为0.042 m.
3.3 卫星群延迟参数的改进效果分析
卫星群延迟参数通过增加参数个数来描述新信号与基准信号的差异,同时通过扩大参数范围和缩小量化单位,使得表达更加精确.
3.4 用户测距精度指数的改进效果分析
新电文中对用户测距精度参数进行了扩充和精化,将URA指数扩展为由星历引起的测距精度URAED指数和卫星钟引起的测距精度URANED指数;把传统电文中N=0的情况细分为16个等级,分别用0~-15来表示,以适应精度提升需要. 以URAED指数为例,说明改进效果,表6为旧电文中UAR指数与URA关系映射表,URA指数范围为0~15,表达的用户测距精度最小尺度为2.4 m;在新电文中,1~15指数的含义如表6所示,而0~-15指数代表的映射关系如表7所示,表达的用户测距精度最小尺度为0.01 m,用户测距精度表达更精细.
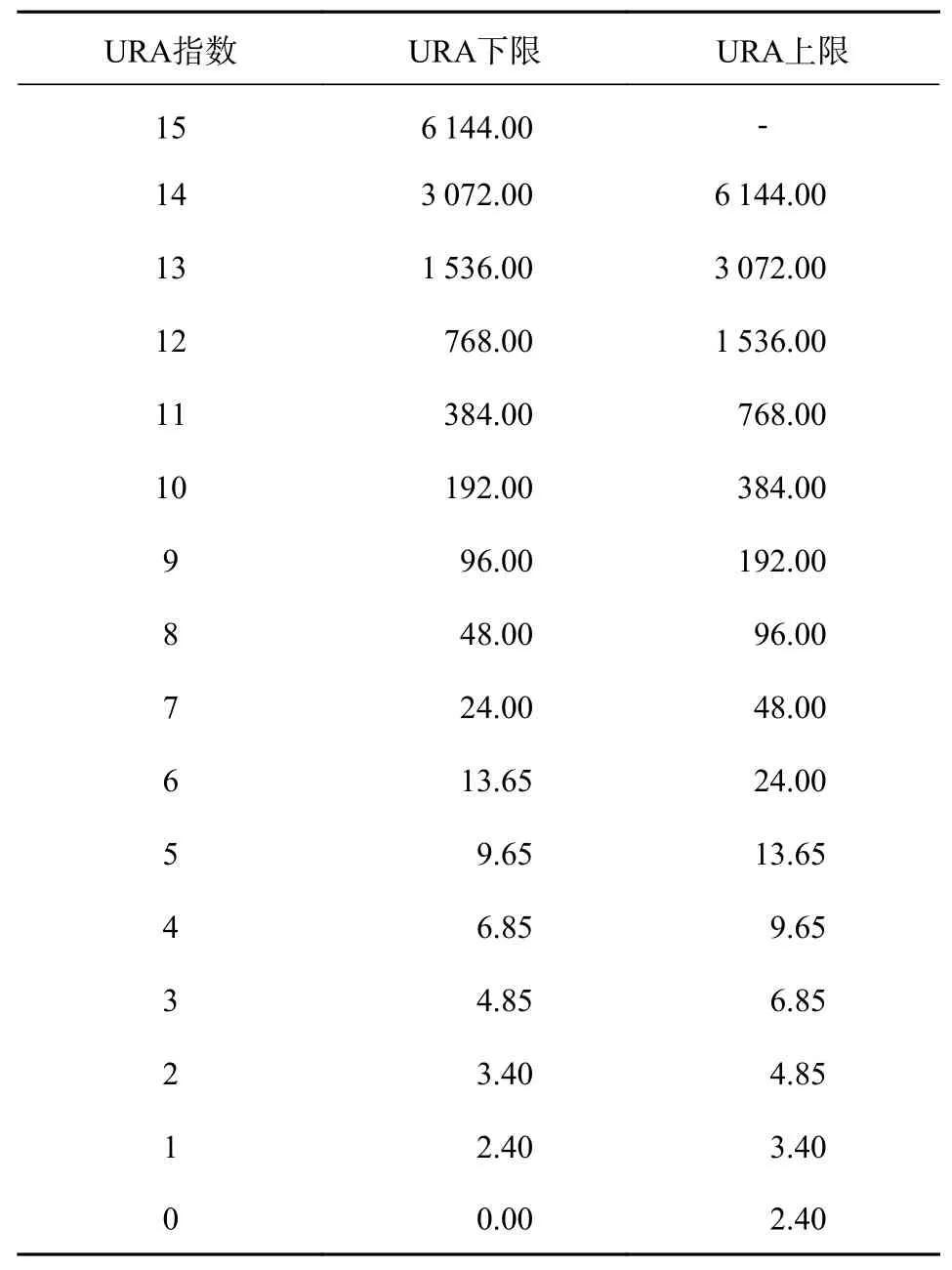
表6 旧电文URA指数与URA关系映射表 m
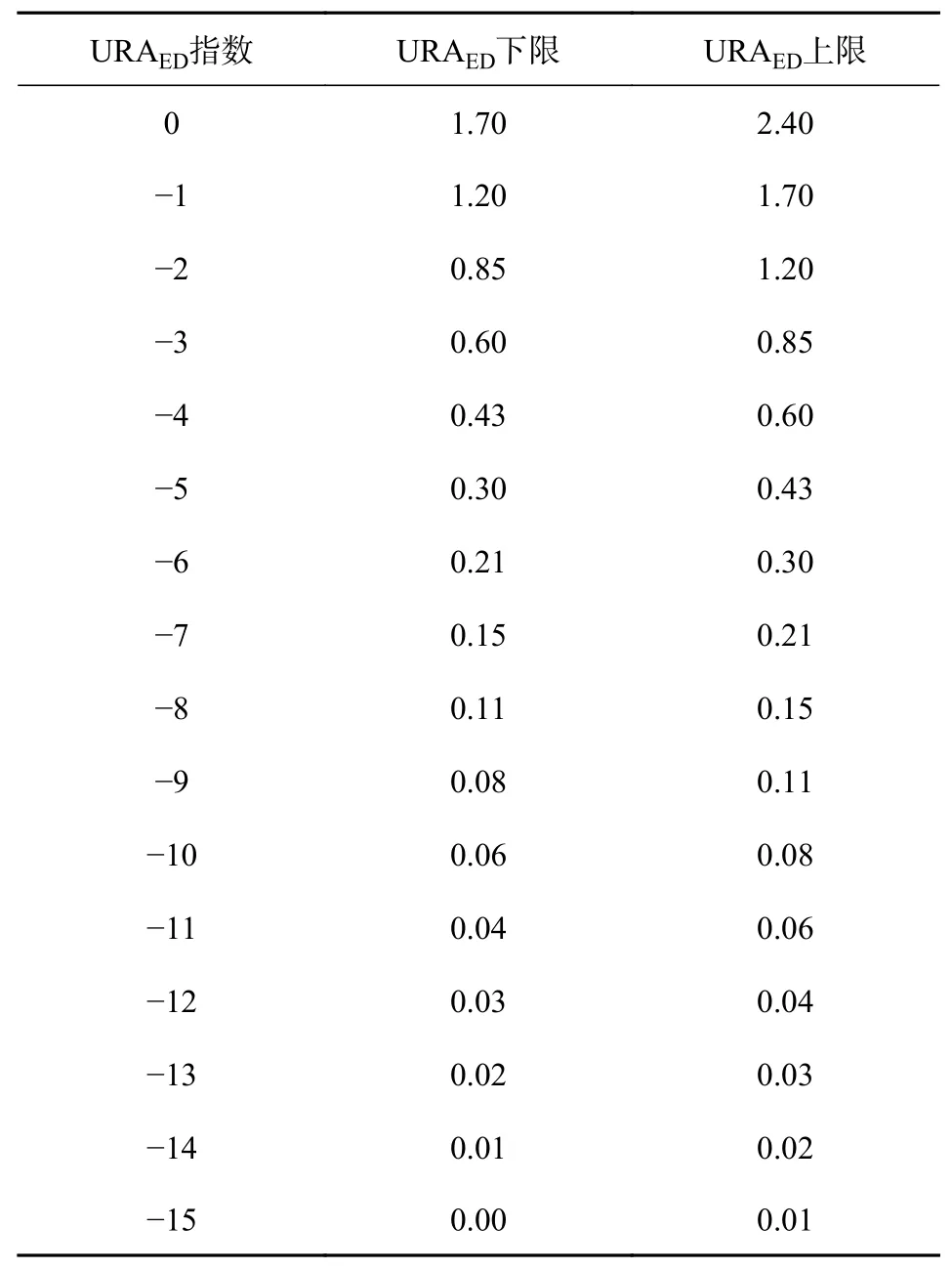
表7 新电文URAED指数与URAED关系映射表 m
4 结束语
本文首先比较了新旧GPS导航电文在星历、钟差、群延迟及完好性等核心定位参数的参数个数、参数意义和所占比特位等方面的异同. 通过对新旧电文星历拟合和钟差表达精度的比较分析,揭示了GPS导航电文核心定位参数的发展演变规律,即采用增加核心定位参数和减小量化单位的方法,提供高了广播星历、钟差产品和群延迟参数的精度,精化了完好性参数的表达尺度. 总体而言,相对于旧电文新电文卫星轨道、卫星钟差和群延迟参数的表达精度由分米量级提升至厘米量级;完好性参数URA指数的最小表达尺度从米级提升至厘米量级.