自动物料定量分装机构控制凸轮设计
2022-01-22文萍马正鹏潘秀石刘勇屠晶晶
文萍,马正鹏,潘秀石,刘勇,屠晶晶
(苏州经贸职业技术学院机电技术学院,江苏苏州 215009)
0 引言
在自动化设备中,凸轮机构常用于实现对运动部件动作的精准运动控制。相对于其他运动控制机构,凸轮机构结构简单紧凑,能够实现复杂的运动规律。按照凸轮机构形状进行分类可以分为平面凸轮和空间凸轮,其中空间凸轮机构的运动特性和动力特性更为优良,因此在机械式自动化机构和自动控制装置中应用广泛[1]。但是,由于当前自动化设备的精准控制的要求,对于凸轮的设计要求越来越高。对于平面凸轮来讲,由于结构比较简单,因此使用一般的CAD软件即可轻易完成设计任务,但是空间凸轮轮廓多为复杂的空间曲面,在进行空间凸轮轮廓设计时,往往都需要借助较为复杂的三维CAD软件及其他的计算软件来完成空间凸轮的三维设计。本文以高端CAD/CAE/CAM一体化软件UG NX为设计平台,介绍了自动物料定量分装机构中物料口开闭装置空间凸轮结构的设计,该设计思路清晰、方法简单,可独立实现高精度凸轮三维设计。
1 装置功能分析与设计思路
1.1 装置功能分析
自动物料定量分装机构三维结构图如图1所示,所设计的自动物料定量分装机构主要实现物料的定量分装功能。不完全齿轮机构2主动轮匀速转动带动从动齿轮轮、花键轴3及上物料盘6间歇转动,上物料盘6上有2个物料桶,下物料盘5的物料桶套在上物料盘6的物料桶上,下物料盘5可以随着上物料盘6一起转动。调节齿轮齿条机构8中转动主动齿轮可以带动齿条叉架7在机架1中上下移动,齿条叉架7通过支叉可以带动下物料盘5在花键轴3上移动,以调节两物料盘上物料桶所围成容积的大小。下物料盘5上物料桶的下端装有物料盖4,物料盖4可以摆动以实现物料桶的开关。需分装的物料从物料进口进入,物料盘旋转180°后,再从物料出口卸出。物料盖4的开关动作由齿条叉架7上的空间凸轮控制。为了保证空间凸轮机构在运行过程中进料与出料位置的准确性及机构运动的平稳性,同时避免从动件在运动过程中出现较大的冲击,就要求凸轮的轮廓能控制从动件按照规定的运动规律准确运动,这也对凸轮的轮廓设计提出了较高的要求。

图1 自动物料定量分装机构三维结构图
1.2 设计思路
凸轮机构传动件的运动规律一般有等速运动规律、等加速等减速运动规律及余弦加速度运动规律。其中,凸轮机构从动件按照余弦加速度运动规律进行运动时会产生较小的柔性冲击,适合用于中速、中载的场合,满足此机构中机构运动的要求[2]。
1)机构运动要求分析。
根据机构设计要求,物料盖板在卸料时张开的角度为30°,经测量从动件升程h=12.7685 mm,机构的推程角φ=45°,远休止角φs=0°,回程角φ′=45° ,近休止角φs′=270°,凸轮基圆半径Rb1=52 mm。其运动规律曲线如图2所示。

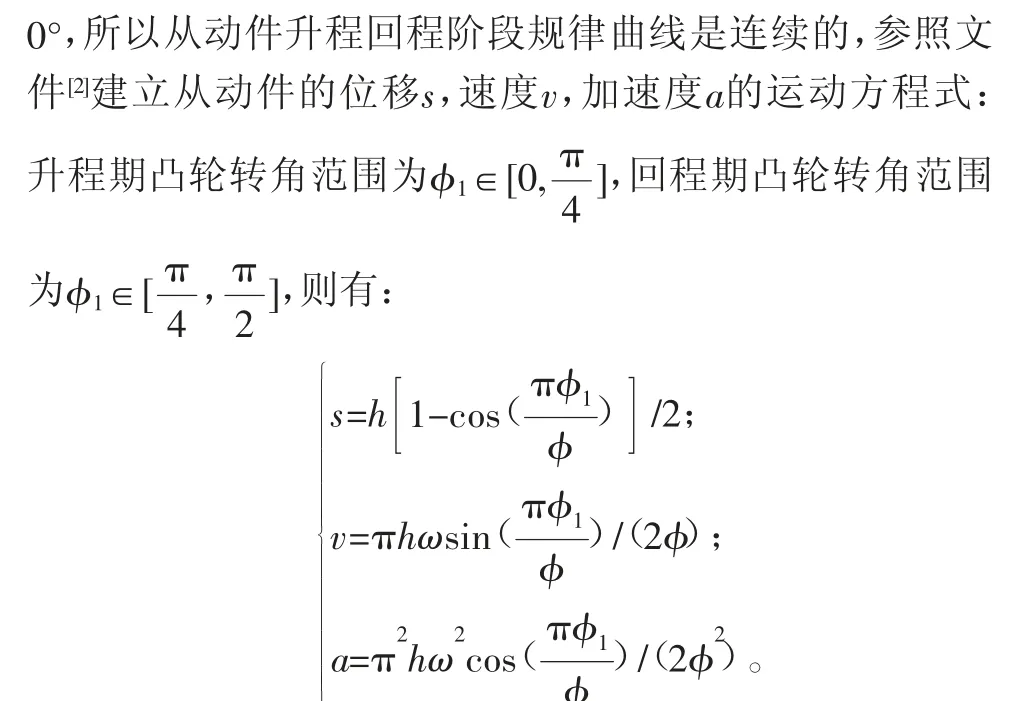

图2 凸轮从动件运动规律曲线

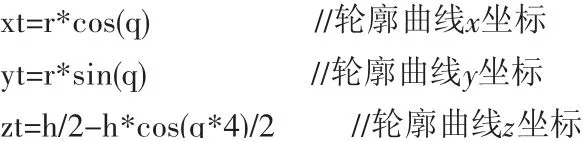
2)确定从动件运动规律。式中:x、y、z为凸轮轮廓曲线坐标;Rb为凸轮基圆半径;φ为凸轮转角,φ∈[0,2π]。
2 空间凸轮轮廓设计
1)将上述运动方程式和参数转化成UG NX可以识别的表达式,选择系统中选择“工具”菜单下“表达式”命令,在弹出的“表达式”对话框中依次添加下面的公式:

2)使用UG NX的规律曲线命令,按照上一步建立的表达式绘制凸轮轮廓曲线。点击UG NX工具栏上“规律曲线”命令,在弹出的“规律曲线”对话框中输入所建立的变量,点击“确定”命令获得曲线[3]。在用“曲线/圆”命令以坐标系原点为圆心,规律曲线两端点为圆弧端点绘制圆弧,得到空间凸轮轮廓曲线,如图3所示。用同样的方法绘制一个Rb2=66 mm的凸轮轮廓曲线,完成后如图3所示。
3)应用UG NX通过曲线组创建曲面。基于图3中坐标系创建直径分别为108 mm和128 mm的圆柱并求差,获得空间凸轮毛坯,如图4所示。最后应用UG NX修剪体命令,用凸轮轮廓曲线创建的曲面修建凸轮毛坯得到如图5所示的空间凸轮三维实体。
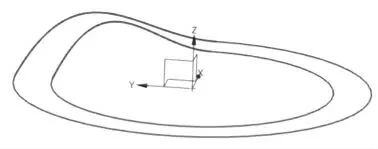
图3 空间凸轮轮廓曲线

图4 凸轮毛坯

图5 空间凸轮三维模型
3 结语
文中阐述了空间凸轮理论轮廓曲线的建模思路,并通过自动物料定量分装机构中用于控制物料盖开闭的凸轮为例,详细介绍了基于UG NX表达式的空间凸轮精确建模的方法。该方法不仅能满足空间凸轮的设计精度,实现机构运动部件的运动要求,而且设计思路清晰,建模过程简单,易于掌握和应用;同时此设计思路和方法具有较强的通用性,可用于不同需求空间凸轮的设计,设计时仅需修改对应的几何参数和运动方程即可,提高了空间凸轮的设计效率;所设计的凸轮也可为后续机构的装配、运动仿真、运动分析及数控加工奠定良好的基础。