基于SolidWorks的苹果采摘小车的模块化设计与运动仿真
2022-01-18吴海青
吴海青,史 燕
(太原工业学院 机械工程系,山西 太原 030008)
0 引言
随着我国种植技术的提高,苹果产量正在以一个平稳的趋势迅速增长[1],这对机械化采摘提出了新的更高的要求。我国水果机械化采摘研究还处于初期阶段,自动化程度较低,需要进一步研究推出更高效的机械化采摘机构,以提高采摘效率。为此,本文设计了一款苹果辅助采摘装置,实现了苹果的快速采摘和自动回收。
1 研究方法
本文所设计的苹果辅助采摘装置是一款采摘车,整体结构分为收集车、升降杆、采摘杆、收集滑道以及末端执行器五大部分。
首先对苹果树的生物学特性和栽培方式进行了调查,总结了果树高度、苹果疏密程度以及果园路况等采摘条件,以此确定采摘小车各模块的结构尺寸,例如采摘杆的长度、升降杆的升降高度以及末端机械爪的结构尺寸等。
然后利用SolidWorks进行三维建模,采用自上而下的设计理念对采摘车进行模块化设计,并对各模块进行虚拟装配。
最后利用SolidWorks中motion功能对采摘小车进行运动仿真。
2 苹果采摘车本体设计
苹果采摘车本体结构分为手推收集车、升降杆和收集滑道三大部分。
2.1 手推收集车结构设计
手推车主体结构如图1所示,收集车采用铝型材搭建整体框架,外壳采用尼龙壳体,车上装有承重网架以及下面的收集箱。
2.2 升降杆结构设计
升降杆的作用是给采摘杆提供悬挂点,使采摘人员从长时间举杆的高强度动作中解放出来,通过升降杆的上下升降来改变悬挂点高度,以适应不同高度的果树采摘情况。
升降杆包括竖直升降机构、探出杆、下垂头和悬挂装置四大部分。
升降杆结构的三维模型如图2所示。
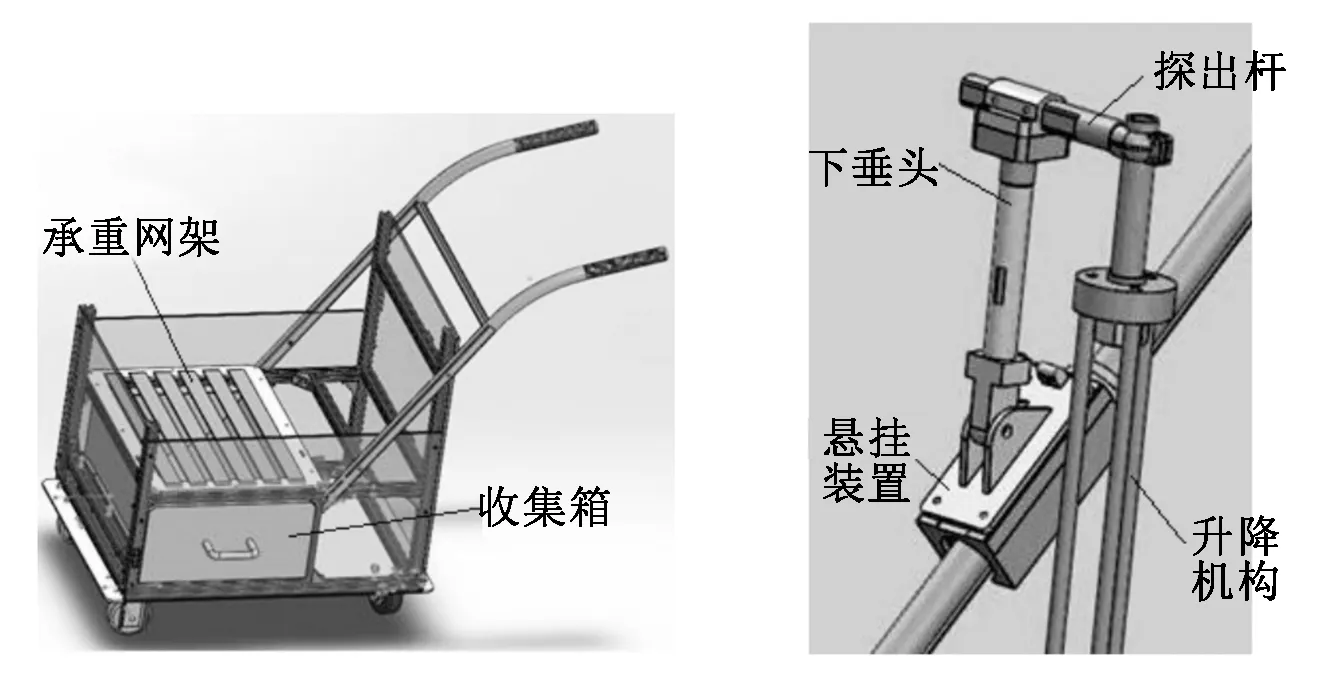
图1 手推车主体结构 图2 升降杆结构
3 采摘杆结构设计
采摘杆分为伸长杆和末端执行器两部分。伸长杆负责伸长,将末端执行器升到一定高度,末端执行器负责抓取和拧断果柄实现采摘。
采摘杆是采摘的主要工具,是采摘员操作最频繁的工具。由于采摘杆外杆直径仅为25 mm,因此本设计采用精密的丝杆进给机构实现采摘杆伸缩运动。采摘杆整体长1.5 m,内杆长1 m,采摘杆全部伸长达到2.2 m左右,可满足大部分高树冠的苹果采摘,规避了高处作业的风险。
末端执行器是水果采摘最重要的一环,采摘的成功与否与末端机械爪抓取的契合程度有决定性关系。机械爪结构为二指夹取机构,采用丝杆电机作为动力,利用大面积的柔性夹取壳左右夹紧苹果,并随着中空转台旋转,将果柄与树枝分离,这样既不会因剪切而损伤苹果也不会对果树树枝造成损伤[2]。
采摘杆的三维模型如图3所示。
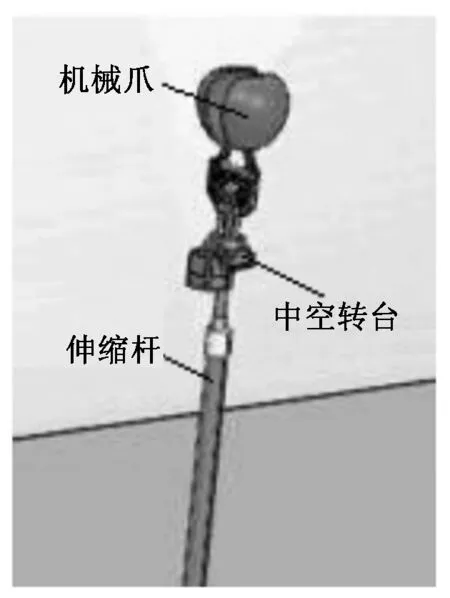
图3 采摘杆结构
4 动画仿真
利用SolidWorks软件中的motion对所设计的苹果采摘车进行动画仿真,仿真效果真实,能顺利将苹果采摘下来。动画仿真效果如图4所示。

图4 动画仿真效果
5 结论和展望
本着自动化辅助采摘的理念,本文设计了苹果采摘小车,对于小批量的采摘来说完全可以胜任,采摘效率和苹果的完整程度都可以得到保证。但是对于大批量采摘来说,苹果采摘小车就显得过于拖沓。
目前水果采摘的自动化程度有望向全自动无人式采摘机方向发展[3],这就涉及到摄像头识别、程序化控制、远程遥控等技术。
