扑翼飞行机器人的设计与研究
2022-01-16赵国尧
赵国尧,杜 强
(西华大学机械工程学院,四川 成都 610039)
相比于旋翼、固定翼飞行器,扑翼机器人具有易操控、可靠性高、隐蔽性强、噪声小等优点,在军用和民用领域有更广阔的应用前景[1]。随着数学、计算机、生物等技术的不断发展,人们逐步发现了扑翼飞行生物的一些特有规律,为设计、研发出具有实际应用价值的扑翼飞行机器人奠定了基础。
1 国内外研究现状
1.1 国外研究现状
加拿大Toronto 大学的Delaurier 设计出一种柔性机翼,可绕机身方向上下扑动[2]。他与合作伙伴Harris 在1991 年制造了1/4 翅翼的大型试验机并试飞成功,被美国FAI 认为机械驱动扑翼飞行器的首次成功试飞,为后来扑翼飞行机器人研究奠定了基础。此次大型扑翼飞行器实验表明飞行器的重量与其长度的立方成正比,因其尺寸过大,且当前阶段的扑翼空气动力学理论尚不完善,致使大型扑翼飞行机器人的发展严重受阻。
1992 年,DARPA 提出“MAV”的概念以来,全球的研究人员开始深入探究微型扑翼飞行器。以较小的扑翼生物为蓝本进行仿生研究。1998 年,Aero Vironment 公司联合加州理工学院,仿蝙蝠研制出“Mirco-bat”的扑翼机器人,能滞空飞行22 分45 秒。2000 年,美国的佐治亚理工学院研发了一种往复式化学肌肉驱动的扑翼微型飞行器[3]。2011 年,美国的Aero Vironment 公司发布了一款类似蜂鸟、高频率扑动飞行的微型扑翼机,名为“Nano Humming Bird”,它的出现被誉为扑翼发展史上的又一里程碑[4],如图1 所示。2018 年德国Festo 公司研制出“Smart Bird”,它同时考虑了翅翼的上下扑动及弦向扭转运动,较好模拟出鸟的飞行状态[5],如图2 所示。

图1 Nano Humming Bird

图2 Smart Bird
1.2 国内研究现状
清华大学的曾理江[6]运用非线性理论,获得了昆虫的飞行参数。北航的孙茂[7]利用N-S 方程和涡动力学理论,从涡不失落角度进一步解释了昆虫飞行中产生高升力的机制。南航的昂海松[8]等人通过非定常涡格法,分析了仿鸟的复杂振动扑翼特性,提出一种新的变速-折叠翅翼结构,使得扑翼机的升力系数大幅度提高[9]。
2 关键技术分析
扑翼机器人的关键技术主要在于如何有效地解决非定常空气动力学问题、扑翼机构的设计问题、扑翼翅翼的设计选择问题以及扑翼飞行机器人的续航飞行能力等问题[10-11]。
2.1 空气动力学问题
由于扑翼飞行机器人是仿昆虫或鸟类的特殊飞行方式——扑翼,通过翅翼运动带动空气的流动,再反作用翅翼的相互影响过程,故经典的空气动力学理论并不适用[11]。目前,主要通过风洞实验和数值计算的方法进行研究。针对扑翼飞行机器人的非定常空气动力学问题的研究,当前有两种常见的分析方式:其一是刚体分析法。它假设扑翼机器人为刚体,采用非线性的牛顿-欧拉方程进行分析[12];另一种是通过建立翅翼的运动学方程,来分析翅翼的动力学参数[13]。随着大量研究工作的进行,以上方法的正确性逐渐得到验证。但如何得到更优的飞行机理以及大幅提高升、推力仍是扑翼飞行器空气动力学研究的重点和难点。
2.2 扑翼驱动机构的设计
无论是昆虫还是鸟类飞行,扑翼驱动机构是实现扑翼飞行的最核心部件。常见的传统扑翼驱动机构[14]包括:曲柄滑块机构,由于滑块运动低副的存在,增加了系统运行中的摩擦力,使得系统效率较低;单曲柄双摇杆机构,因为两侧摇杆运动的不对称性,会产生不平衡惯性力;双曲柄双摇杆机构,是对单曲柄双摇杆机构优化后的一种机构,它是当前应用最广泛的扑翼机构;空间曲柄摇杆机构,是针对微型扑翼机的微型化要求,所提出的一种空间机构,其原理同双曲柄双摇杆机构类似,不同之处在于将两曲柄的旋转中心转过90°和将原先的转动副换成球副,这样使得扑翼机构更加紧凑和灵活,如图3 所示。
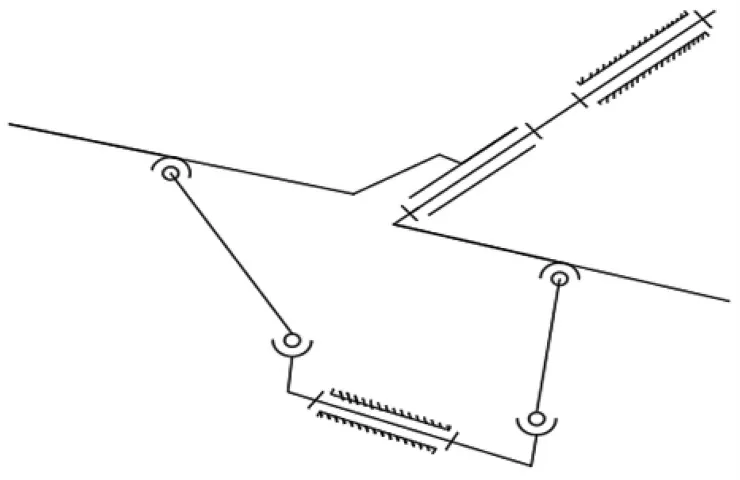
图3 空间曲柄摇杆机构
基于对传统扑翼机构的探索,当前也有一些新的扑翼结构诞生,例如:王红超等[15]研发出一种带有弹性储能原件连接的新型仿鸟扑翼机构,从翅翼独立控制、能量消耗更少、合理的折叠翅翼平均升力更高三个方面介绍新型扑翼机构的优势,如图4 所示;李康康等[16]采用变刚度串联关节机构和平面转动冗余并联机构实现翅翼的刚度变化,进一步研究了扑翼飞行机器人的升、推力随扑翼刚度变化的机理。
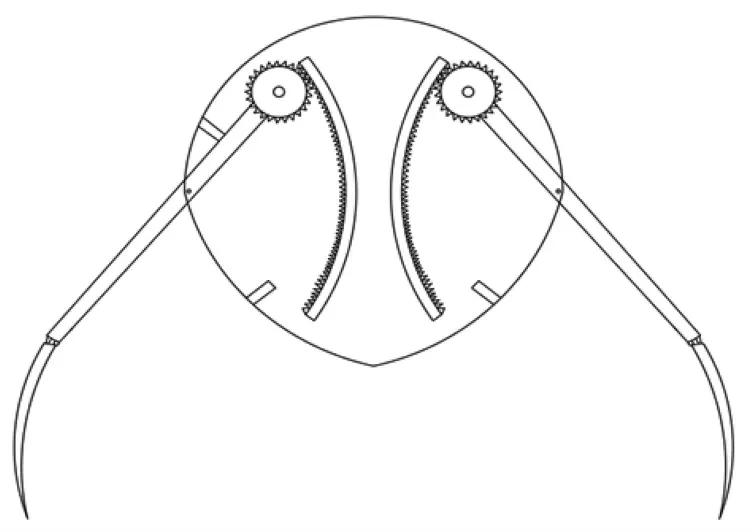
图4 新型仿鸟扑翼机构
2.3 翅翼的设计与选择
观察发现,几乎所有的昆虫都是单段翅翼结构且扑动频率都较高。研究者发现蜻蜓的褶皱翅翼影响着翅翼的固有频率和模态情况,使得蜻蜓在高频扑动情况下不会发生共振,而且相比光滑翼型具有更好的升力特性[17]。除了对单段翅翼结构的研究,郝淑文[18]通过流固耦合的数值方法研究了气动弹性对膜扑翼的气动性能影响,发现具有刚性前缘、柔性后缘和适当厚度的翼型具有更好的气动特性。
鸟类翅翼与昆虫翅翼有较大不同,通常采用的是双段翅翼结构。陈亮[19]等根据改进的叶素理论对仿鸟翅翼进行研究,发现鸟类翅翼的内段翼主要是产生升力,而外段翅翼主要产生飞行的推力。借鉴固定翼较成熟的翼型应用,对双凸、平凸、凹凸、对称以及S 型翼型进行数值对比,发现弯度较大的S 型翼型能有效提升扑翼的升力,而双凸类翼型对扑翼飞行的推力贡献较大。
无论是昆虫还是鸟类,过去的研究者们常将其翅翼简化为刚性翅翼进行流场分析,这显然是不符合实际的[20]。近年来,随着计算机水平的不断发展提高,研究者们发现柔性翅翼不仅能提高飞行升力还能提供更大的推力,而且扑翼飞行器上扑过程能够有效地减小空气阻力[21-22]。因此,在翼型的设计与选择过程中可以参考具有一定柔性变形规律的翅翼类型。
2.4 飞行动力系统
扑翼飞行机器人的动力装置在满足体积小、质量轻的前提下,需提供足够的飞行速度和航程。当然不同驱动类型的扑翼机构需要不同的动力装置。目前,最常见的动力源系统是微电机驱动、电磁驱动、压电驱动和人造肌肉驱动等[23]。
北航的张钰等[24]提出了一种新型电磁驱动的方案,并建立了微梁振动模型验证了其可行性。国外Chattaraj N 等[25]发现了一种类似微扑翼与叠层压电驱动器之间传输的分布式柔性机构,不仅减小了扑翼机构的横向尺寸,还将原有的扑动频率提高了13 倍。人造肌肉驱动通过注入化学元素产生化学能,使得“肌肉”的伸缩和弯曲实现扑翼机构的复杂运动。有学者指出,美国的佐治亚技术研究所GTRI 根据其特点研发了名为“Entomopter”的扑翼机[26]。以上动力系统特点如表1 所示。
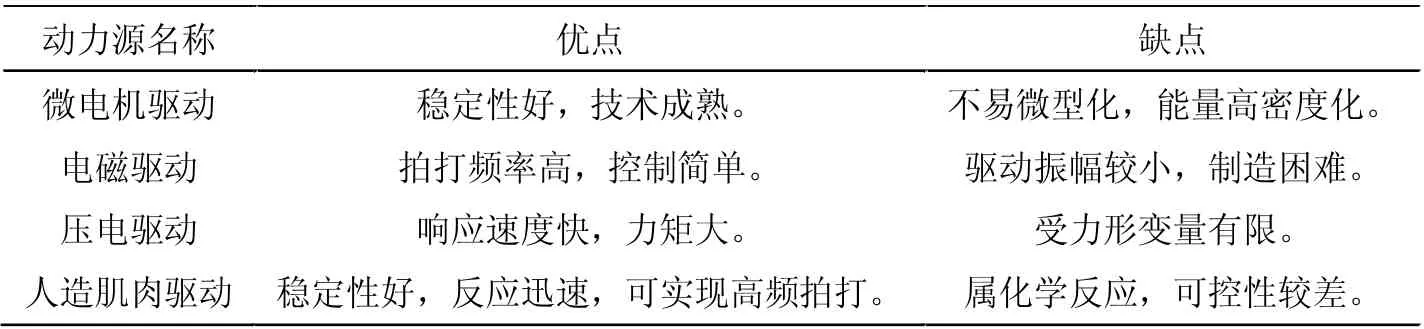
表1 动力系统的优缺点
3 展望
随着科技水平的不断提高,从整体角度出发,对扑翼飞行机器人未来的研究和发展方向提出以下几点展望:
(1)扑翼飞行的研究始终离不开空气动力学。只有通过对昆虫和鸟类飞行机理的深入研究,建立正确的数学模型,分析低雷诺数下非定常气动特性,获得气动参数变化规律,才能为扑翼飞行机器人的设计提供理论依据。
(2)完善扑动机构的设计。通过对现有扑动机构的优缺点总结,实现新机构的创新,例如采用柔性机构、空间机构、多样式组合机构等新型扑翼驱动机构,以完成更优异的驱动机构设计。
(3)翼型的选择。不同类型的翼型具有不同的气动特性,所以选择合理的翼型极其重要。柔性翅翼能有效改善扑翼的气动特性,随着技术的发展,柔性翼技术将成为未来发展的必然趋势。
(4)动力源的研究。由于微电机技术较成熟,在近期驱动器仍以微电机为主。要想获得更优的微电机技术,只能对微电机的组成部件进行优化,或者研发出新型超微轻质高驱动智能化的装置。
4 结束语
本文就扑翼飞行机器人的研究现状进行了回顾和分析,并对其关键技术作了总结,最后对飞行机器人的发展趋势作了展望。实验和数值模拟方法是研究扑翼飞行气动理论的有效方法;扑动机构、翅翼和动力系统的研究,是探寻更完善的扑翼飞行器结构及系统设计的有效途径;扑翼飞行器的发展方向将是微型化、智能化、柔性化。