基于改进型指数趋近率的三相PWM整流器滑模控制策略
2022-01-14孙海东程艳明刘合淼
孙海东,柳 成,张 浩,程艳明,刘合淼
(北华大学电气与信息工程学院,吉林 吉林 132021)
随着电力电子技术的发展,由不可控整流器件构成的AC-DC整流器功率因数低、输入电流总谐波失真高的缺点逐渐显露,为解决这个问题,引入了PWM整流器.PWM整流器由全控型电力电子器件构成,以IGBT或MOSFET作为开关器件,能实现单位功率因数运行,具有实现能量双向流动、输出电压连续可控、谐波含量低等优点,在电解、电镀行业得到了广泛应用[1].
PWM整流器的控制系统分为线性和非线性两类,线性控制以双闭环PID控制最为常见,并在PID的基础上发展出模型预测控制、模糊PI控制、自适应PI控制以及基于神经网络算法的PID控制等.传统PID[2]的应用最为普遍,能够对整流器进行有效控制,但在参数变化以及出现外部扰动时传递函数发生改变,使得控制效果变差,导致系统输出电压误差较大;自适应PI控制[3]可以不断检测系统变化,在线修正控制系统的PI值,对外部扰动具有较好的适应能力,但数学模型的建立和运算比较复杂,辨识和校正需要一定时间,不适用于突变和实时性较高的过程;模型预测控制[4]、模糊PI控制[5]以及基于神经网络算法的PID控制[6]弥补了传统PID的不足,在不需要精确模型的情况下便可有效抑制外部扰动,对参数变化鲁棒性强,但存在计算量大以及计算时间长等问题.PWM整流器是一个强非线性系统.因此,非线性控制相比线性控制具有更好的适应性.文献[7]提出的自抗扰控制模型构造简单,可以观测出系统以外的扰动,具有很强的抗扰动能力,但当被控制系统阶数较高时,选取的参数较多,会产生很大的计算量.滑模控制也属于非线性控制的一种,其结构简单、适应性好、鲁棒性强,被广泛应用于PWM整流器.本文分析滑模控制原理,设计一种改进型指数趋近率,使指数趋近率反比于输出电压误差,利用趋近率与状态变量之间的联系,抑制抖振,提高输出电压的稳态精度.通过设计调节因子a,提高控制系统的响应速度,加强系统的抗干扰能力以及鲁棒性,使变结构控制在非线性系统中具有更好的控制效果.
1 主电路设计
1.1 原理及数学模型
PWM整流器通过控制开关管的组合开通及组合关断来控制交流基波分量Uab的幅值和相位,实现交流输入电压和交流输入电流同相位运行,达到整流的目的[8].PWM整流器基本电路见图1,由交流回路、开关管电路、直流滤波部分组成.其中,交流回路包括交流电压源及电源侧电感等元件;开关管电路由6个IGBT组成;直流回路由滤波电容和负载电阻组成.
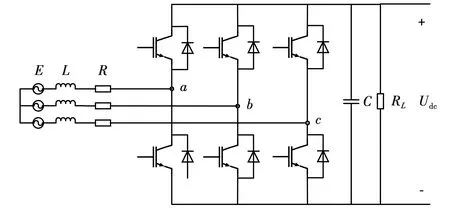
图1 PWM整流器主电路拓扑Fig.1 Main circuit topology of PWM rectifier
PWM整流器的三相静止数学模型:
采用前馈解耦直接矢量控制将静止数学模型变换为dq旋转坐标系下的数学模型(各符号意义见图2):
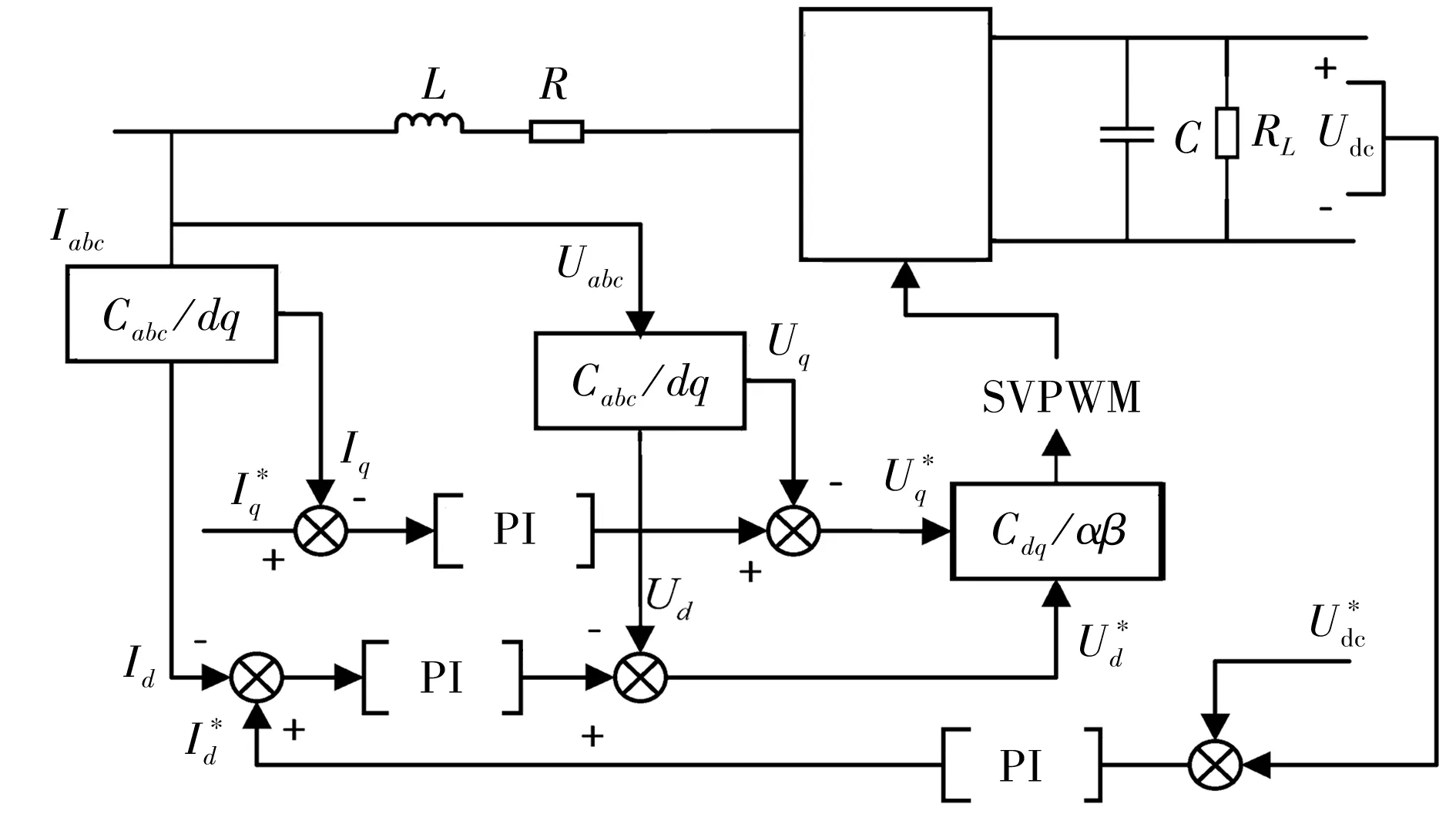
图2 双闭环PI控制原理Fig.2 Control principle of double closed-loop PI
(1)
1.2 控制系统设计
本文设计的控制系统为经典的双闭环控制系统,可以保证电流的跟踪性和输出电压的稳定性.双闭环PI控制原理见图2,其中:id、iq、ud、uq分别是将交流端电压和交流端电流转换成两相旋转坐标系后的电流和电压.电流内环给定值为电压外环经过PID控制器整定后的输出值[9].
2 滑模控制设计
考虑到滑模控制结构具有很好的调节能力,并且数学模型简单,为增加输出电压的稳定性,采用滑模控制替换传统PID控制.
滑模控制的原理是通过控制率的作用将滑模面以外的参数逐渐靠近滑模面,最终在滑模面上滑动[10],直至达到系统的控制目标.取得良好控制效果的关键在于选取合适的控制率及滑模面.控制率的选择需视系统情况而定,而滑模面的选择通常为系统的控制目标.
本文设计电压外环的作用是使输出电压稳定在给定的期望值.选取的滑模面:
选取指数趋近率作为控制率,使电压稳定快速地趋近给定值
(2)
则由式(1)和式(2)可得
为了实现单位功率因数工作,提高系统效率,将无功电流iq给定值设置为0,得到
当系统稳定时,iq=0、eq=0,得到最终滑模控制的数学模型:
为解决整流器抖振问题设计一种改进型指数趋近率:
(3)

本研究的创新点在于对a进行参数优化:
a=1-εUdc
(4)

3 仿真验证
仿真验证本文所提出控制策略的有效性.表1为电路拓扑主要技术参数,表2为控制系统参数,其中,电压外环PID参数通过典型Ⅱ型系统计算得出,保证了输出电压的抗扰动能力,同时为了实现电流的快速跟踪,电流内环PID参数由典型Ⅰ型系统计算得出.G-SMC(具有调节因子的改进型滑模控制)控制系统在电流内环不变的基础上替换电压外环,k1、k2为滑模趋近率系数,根据快速趋近滑模面以及减小抖振的要求设计出外环G-SMC控制器参数.
表1 系统参数Tab.1 System parameter

表2 控制系统参数Tab.2 Controller parameter
PID和G-SMC输出电压波形见图3.由图3可见:在同样响应速度下,G-SMC的波形趋于平稳,没有产生超调,很好地解决了PID速度与超调存在冲突的问题.两种控制器在负载突变的情况下也表现出不同状态.在0.15秒时,负荷电阻由R=20 Ω降至R=18 Ω.G-SMC在响应速度以及稳态精度上均优于PID控制,表现出更好的抗扰动能力.
不同控制率变结构输出波形见图4,其中,SMC为传统指数趋近率滑模控制,Z-SMC为改进型滑模控制.由图4可见:在同等条件下,Z-SMC和G-SMC输出电压的稳态误差更小,均抑制了变结构的抖振现象.在响应速度方面,由于G-SMC对调节因子a进行了优化,变化的趋近率使改进型变结构响应速度进一步提高.
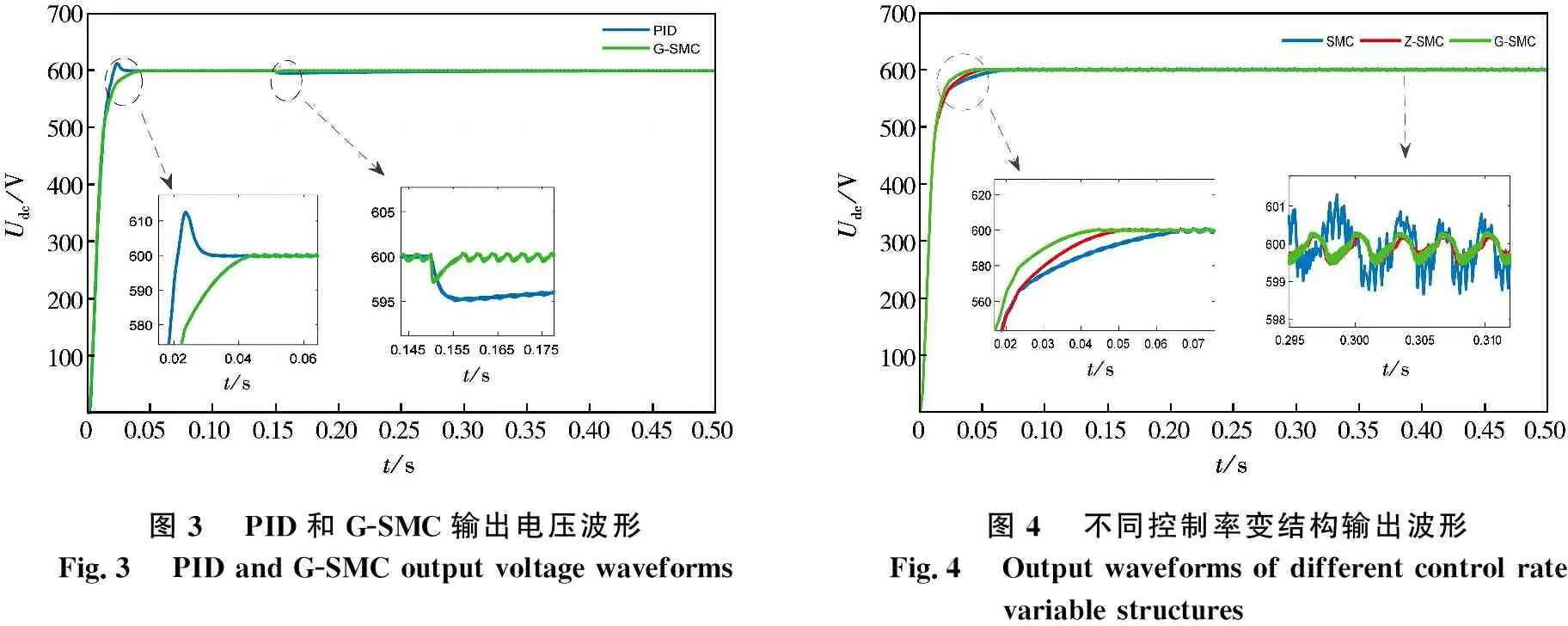
图3PID和G-SMC输出电压波形Fig.3PID and G-SMC output voltage waveforms图4不同控制率变结构输出波形Fig.4Output waveforms of different control rate variable structures
4 小 结
本文分析了滑模控制原理,指出指数趋近率滑模控制系统的趋近速度与抖振之间存在的矛盾;设计了一种改进型指数趋近率,在保证鲁棒性的同时抑制了输出电压的抖振现象,通过优化调节因子来提高系统响应速度.仿真结果表明:在相同条件下,不管是响应速度还是抗干扰能力G-SMC均要好于SMC、Z-SMC,验证了所提出控制策略的有效性.在非线性控制中,本文设计的控制系统结构简单、适应性强,在未知非线性复杂系统控制领域具有广阔的应用前景.
