改进VMD和非凸重叠组收缩降噪的行星齿轮箱早期故障特征提取
2022-01-12王朝阁李宏坤曹顺心刘艾强任学平
王朝阁,李宏坤,曹顺心,周 强,刘艾强,任学平
(1.上海海事大学物流工程学院,上海201306;2.大连理工大学机械工程学院,辽宁 大连116024;3.内蒙古科技大学机械工程学院,内蒙古包头014010)
引言
行星齿轮箱具有传动平稳、减速比大、效率高和承载能力强等优点,已被广泛应用于风力发电机、直升机、高速列车和舰船等大型复杂机械设备中[1]。然而,行星齿轮箱通常在高负荷、强冲击和高污染等恶劣工况下运行,同时受到温度、润滑等物理化学条件的影响,极易导致齿轮出现点蚀、剥落和疲劳裂纹等局部故障[2]。齿轮箱一旦发生故障,将加速设备性能恶化,轻则引起整个动力传输系统失效,重则导致设备毁坏。因此,若能在齿轮箱失效早期实现故障溯源并及时消除隐患,对保证设备稳定安全运行,避免灾难性事故发生意义重大。
由于恶劣的环境、复杂的结构和独特的运行方式,使得从行星齿轮箱壳体上获取的故障振动信号表现为强背景噪声、非平稳、非线性和耦合调制等特点。近年来,针对非平稳非线性信号的自适应信号分析方法得到了广泛的研究,它为周期性脉冲提取和齿轮箱故障诊断提供了有力工具。例如,经验模态分解(Empirical Mode Decomposition,EMD)能够根据信号在时间尺度上的局部特性自适应地分解为多个内禀模态分量[3]。然而,EMD具有过包络、欠包络、端点效应和模态混叠等不足,限制了其在故障诊断领域中的应用。随后,Smith[4]提出了局部均值分解(Local Mean Decomposition,LMD)方法,它克服了EMD中包络、欠包络的问题,具有端点效应不明显、迭代次数少等优点。但同EMD方法一样,LMD仍然存在模态混叠的问题。为了抑制模态混叠现象,Yang等[5]在集合经验模式分 解(Ensemble Empirical Mode Decomposition,EEMD)[6]基础上提出了一种噪声辅助分析的总体局部平均 分 解(Ensemble Local Mean Decomposition,ELMD)方法。然而,ELMD中添加噪声后在信号重构时存在残余噪声污染和运算量大等问题。此外,不同于EMD及其扩展算法,Gilles提出的经验小波变换(Empirical Wavelet Transform,EWT)[7]通过对信号的Fourier频谱进行划分来确定不同频带下的模态分量,但该算法鲁棒性差,在Fourier频谱区间划分时易受噪声干扰而导致频谱划分过于密集,使结果出现过分解现象。
为克服上述方法缺陷,Dragomiretskiy等[8]提出了变分模态分解(Variational Mode Decomposition,VMD),作为一种新颖的自适应信号分析方法,VMD把信号分离过程转化到变分框架中,并采用非递归的方式获取若干个具有稀疏特性的模态分量。VMD算法自提出以来,因其良好的噪声鲁棒性、较低的计算复杂度和完备的数学理论基础而受到学者们的青睐。Wang等[9]采用VMD对转子系统碰摩故障分析,并研究了其等效滤波特性,结果证明VMD在提取瞬态冲击方面比EWT,EMD和EEMD更加有效。然而,VMD的优越性依赖于模态数目K和惩罚因子α的准确选取,这极大地制约了其应用。目前,文献中主要是采用如下三种途径来获得适当的参数:第一种根据先验知识或中心频率观察法[10-11],显然,在复杂的情况下这种方法缺乏适应性且降低了分解的精度;第二种采用优化算法,如粒子群算法、蚱蜢算法和灰狼算法等[12-14],虽然这些优化算法可搜寻到适当的参数,但需要大量的迭代试验,计算效率较低;第三种通过若干评价指标来选取最佳参数。例如,Zhang等[15]通过能量和相关系数搜索K值,但这种方法选取的K值并不适用于所有的信号,同时未考虑惩罚因子α。因此,仍然需要对VMD算法做进一步优化,通过自适应判据来指导参数的合理选择。此外,VMD得到的模态分量中仍含有大量的噪声,特别是周期脉冲对噪声很敏感,影响故障特征的有效识别。
针对上述问题,本文提出一种融合改进VMD和自适应非凸重叠组稀疏收缩降噪的早期故障特征提取方法。首先,MVMD算法中通过故障信号尺度空间谱的自适应分割来确定分解所需模态个数K,同时建立峭度最大值判定准则自动选取最佳的惩罚因子α。然后,利用ANOGS算法对峭度最大的敏感模态进行自适应稀疏降噪,从而增强微弱的周期性故障冲击特征。数值仿真和工程实验数据分析表明所提方法能够有效、准确地提取早期微弱故障特征,为行星齿轮箱故障预测与诊断提供了一种新技术。
1 改进的变分模态分解
1.1 VMD算法
VMD算法将信号的分离转换为变分模型最优化的求解问题,在分解过程不断更新各个模态的频率中心与带宽,从而完成信号频域自适应剖分,最终获取到若干个具有稀疏特性的模态分量[8-12]。因此,VMD实质是构造变分问题和求解变分问题。
首先,构建约束变分问题为

式 中{uk}={u1,u2,u3,…,uk}为分解的K个模态分量;ωk为对应模态uk的中心频率;∂t(⋅)表示对时间t的偏导数;δ(t)为脉冲函数;x(t)代表原始信号。
其次,为获取如上约束变分问题最优解,引入Lagrange乘法算子λ(t)与二次惩罚因子α,将其转变为无约束的变分问题[13-14]。扩展的Lagrange表达式如下

利用乘法算子交替方向法(Alternate Direction Method of Multipliers,ADMM)求解式(2)的最优解[15]。首先,预设模态个数;同时,初始化模态函数频域表达式,及对应的中心频率和Lagrange乘法算子;然后,各模态分量及其中心频率分别按照以下两式不断更新

模态和中心频率每次迭代更新后,Largrangian乘数根据下式也被更新

式中τ为噪声容忍度,为了获得较好的降噪效果,设τ=0。继续上述迭代,直到满足收敛条件,即

式中ε为收敛性判定准则,本文取ε=1×10-7。
1.2 参数的自适应选取
由上述理论可知,在VMD算法中模态个数K、惩罚因子α、噪声容忍度τ和收敛准则ε这四个主要参数需要提前确定。与前两个参数相比,τ和ε对分解结果影响较小,因此通常采用算法中默认值(τ=0和ε=1×10-7)。然而,模态个数K决定着分解的准确性和效率,惩罚因子α影响着模态分量的频带宽度与噪声抑制性能。因此,寻找与待分析信号相匹配的最佳参数组合[K,α]对于旋转机械故障诊断的成功至关重要。
1.2.1 分解模态参数K的确定
信号傅里叶谱的局部信息经常受到噪声严重影响,而无法找到有意义的模态。基于频谱的尺度空间表示,可以很好地抑制噪声干扰,能以一种简单快速的方式寻找到频谱中有意义的模态,具有无参数化和自适应性。对于待分析信号x(t),其离散傅里叶变换为

信号傅里叶频谱的离散尺度空间可表示为[16]

式中代表核函数;s为尺度参数;P为高斯核函数长度,这里取P=6s+1。
一旦设定尺度参数s0值,则尺度空间L(f,s0)的每个局部极大值对应一个单分量成分[17],该单分量的带宽由相邻的两局部极小值确定。因此,通过检测L(f,s0)尺度曲线上的所有局部极大值,在获取的极值两侧搜索局部极小值来确定所有单分量的划分边界点。如此可以找到尺度空间谱分割的所有边界点ωn(n=1,2,3,…,M-1),将其划分为连续的M个频带,即自动找到尺度谱中M个有意义的模态分量。上述模态数目成为MVMD算法中最佳模态个数确定的依据(即K*=M)。此外,为保证每个分解的单分量中都能尽可能多地携带与故障相关的信息,尺度参数n应该取较大的值,然而过大的尺度参数将会忽略掉与故障相关的微弱特征。因此,本文尺度参数取值s=3×fch2,fch为故障特征频率。
1.2.2 惩罚因子α的确定
惩罚因子影响着模态频带宽度,带宽较大可能导致模态中混有较多的噪声,而较小的带宽则会使模态中遗漏掉一些重要的故障信息。峭度对故障瞬态冲击尤其敏感,通常与故障相关的模态分量为非高斯信号,其峭度值大于3。峭度值越大,说明模态分量中含有越丰富的故障冲击成分。其定义为

式中u(t)代表模态分量,μ为u(t)均值,σ为标准差。
在确定模态个数K后,利用峭度判据构造最佳惩罚因子的选取策略,从而分解出包含故障冲击成分最丰富的模态。本文设置惩罚因子取值范围α∈[1500,4000](参考文献[12-13]),步长为100,通过迭代搜索方式选取最佳参数。在迭代分解过程中,当模态的峭度值达到最大或保持不变时,对应的α即为分解所需最佳惩罚因子α*。
2 自适应非凸重叠组收缩降噪算法
2.1 NOGS降噪原理
设一维信号x∈RN,在高斯白噪声w的污染下,得到的实际观测信号y可表达为

假设x具有重叠组稀疏特性,求解x(即从观测信号y中恢复x),可转化为如下的稀疏优化问题
式中x*(i)为降噪后的信号为目标函数;γ为正则化参数;R(x(i))为相应群组稀疏惩罚函数,其定义为

式中i为组索引,j表示组大小,且每组具有相同尺寸|J|,本文取J=5[18]。
所以,根据重叠组稀疏惩罚函数的定义,损失函数可转化为
式(13)中,目标函数与惩罚函数都是典型的凸函数。因此,本文利用优控最小化算法(Majorization-Minimization,MM)迭代求取上述最优解,得到

重复迭代,直到算法收敛,最终输出信号x。NOGS算法的详细介绍见文献[18]。
2.2 正则化参数的自适应选取
正则化参数γ在模型中起着平衡损失函数和正则化项的作用,因此,选择合适的参数γ对于提高周期脉冲的提取精度具有重要意义。γ需要正比于σ,这里σ是噪声的标准差,可表示为

式中ulmax为从MVMD分解结果中筛选出的敏感模 态;N表 示ulmax的 长 度的 均 值。因 此,正则化参数γ可写为

γ的选取依赖于合适的乘子p。本文构造评价指标(Measure Index,MI)来指导参数γ的选择,MI定义为模态信号与残差信号的包络负熵[19]之比:
3 应用研究
MVMD-ANOGS算法在行星齿轮箱早期故障特征提取中的具体实现步骤如下:
步骤1:获取齿轮箱故障振动信号x(t)。
步骤2:计算信号x(t)的尺度空间谱表示L(f,n),根 据1.2.1节 尺 度 空 间 谱 分 割 原 理,对L(f,n)进行自适应分割,获取尺度谱中M个有意义的模态,令VMD中分解的最佳模态个数K*=M。
步骤3:在K*=M情况下,设置惩罚因子的取值 范 围α∈[1500,4000],步 长 为100,进行 迭 代分解,比较每个惩罚因子下获取模态的峭度最大值大小,将最大峭度对应的α判定为最优惩罚因子α*。
步骤4:利用最佳参数组合[K*,α*],对x(t)进行MVMD最优模态分解,获得一系列的窄带模态分量ul,选取峭度值最大的模态作为敏感模态ulmax。
步骤5:使用ANOGS算法对敏感模态进行稀疏降噪,且在评价指标MI最大值下获取最佳降噪结果,从而显著提升模态中的周期性冲击特征。

图1 基于MVMD-ANOGS算法的诊断流程图Fig.1 The flowchart of fault diagnosis based on MVMDANOGS
4 仿真信号分析
4.1 太阳轮局部故障模型
为验证所提方法,构建太阳轮局部故障仿真模型。该信号模型y(t)由太阳轮故障冲击振动g(t)、其他零部件的正常旋转振动r(t)、随机冲击h(t)和随机噪声n(t)这4部分构成,其方程如下

当太阳轮发生局部故障时,传感器拾取到的故障振动信号可以用调幅调频的形式来表示[20]。因此,建立的太阳轮故障冲击模型为

式中s(t)表示太阳轮旋转引起的调幅效应;ak(t)和bk(t)分别表示太阳轮故障的调幅(AM)与调频(FM)函数;fm为齿轮副啮合频率;k代表齿轮啮合倍频的数量;fsr为太阳轮的绝对旋转频率;fs为太阳轮故障特征频率;φk为第k次齿轮啮合谐波的初相位;Akn和Bkn分别为调幅和调频函数的幅值;αkn和βkn分别是第k次齿轮啮合谐波的第n个边带相位。
通常行星齿轮箱呈现周期性运转,所以用高、低谐波分量分别表示不同零部件旋转振动

式中i为谐波分量的个数;Ci,fi和θi分别代表谐波分量的幅值、频率与相位。
此外,在故障数据采集过程中,可能由于电磁干扰或偶然撞击机壳产生随机冲击

式中随机变量Rj与Trj分别为随机脉冲幅值和发生时刻;S(t)为单位脉冲分量,fRE为脉冲激发的共振频率;β为阻尼系数。n(t)为添加到仿真信号中信噪比SNR=-8 dB的高斯白噪声。仿真信号的参数值如表1所示。
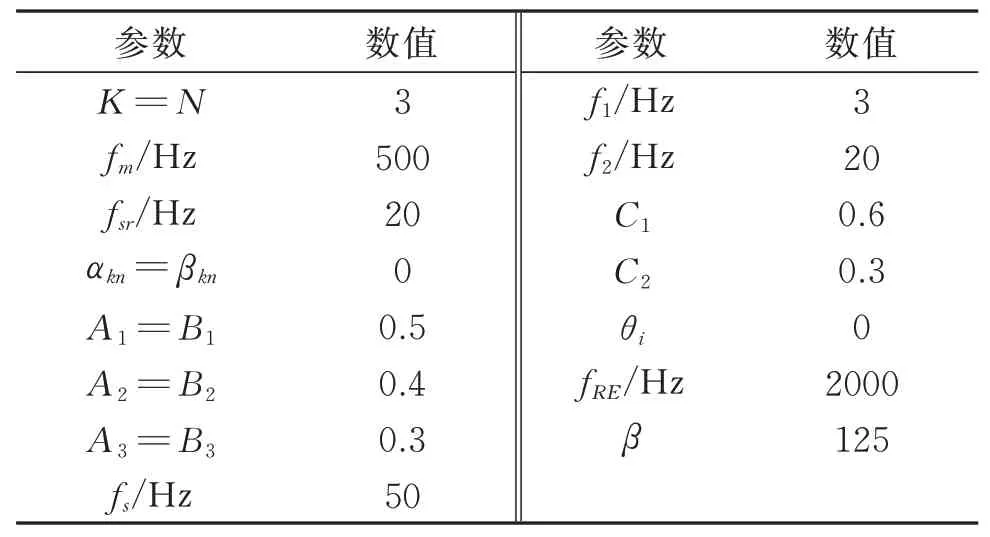
表1 太阳轮局部故障信号仿真数值Tab.1 Simulation values of the sun gear fault signal
4.2 太阳轮故障信号仿真实验
仿真分析时设置信号采样频率为5120 Hz,数据长度取10240点。将表1中的参数值分别代入式(20)-(22)中,得到太阳轮故障冲击、其他零部件的旋转振动、随机冲击与高斯白噪声如图2所示。图3为混合故障仿真信号及其FFT频谱和包络谱。由图3可知,时域波形中太阳轮故障激起的微弱周期性冲击已被强噪声完全掩盖,频谱和包络谱中均无法提取与故障相关的特征频率。因此,在强噪声干扰下,传统的时、频域和包络解调方法失去对太阳轮早期微弱故障的检测能力。

图2 仿真信号各分量Fig.2 Each simulation component of sun gear fault

图3 混合故障仿真信号及傅里叶频谱和包络谱Fig.3 Mixed fault simulation signal and its FFT and envelope spectrum
为了准确提取太阳轮早期微弱故障特征,利用本文方法对图3(a)中信号进行处理。首先,计算混合故障仿真信号的尺度空间谱表示,如图4(a)所示。可以看到,尺度空间谱根据信号特征自适应确定有意义模态的分割边界(如图4(a)中红色点划线所示)及模态数目为7。因此,确定MVMD算法中最佳分解模态个数为K*=7。然后,设定惩罚因子α搜索范围为[1500,4000],采用峭度最大化原则选取最优参数α*。图4(b)为惩罚因子与峭度最大值之间的关系。由图4(b)可知,当α=3000时获取峭度最大值,此时判定MVMD中最优惩罚因子为α*=3000。确定最佳参数组合[K*,α*]=[7,3000]后,将混合故障仿真信号进行MVMD最优模态分解,获取的7个模态分量如图5所示。根据敏感模态筛选准则,选取峭度最大的模态u2作为敏感模态。最后,利用提出的ANOGS算法对u2进行自适应稀疏降噪,降噪后模态及其包络谱如图6所示。由图6可知,降噪模态的时域波形中故障冲击特征得到增强且被清晰地呈现出来,噪声与其他干扰成分被有效抑制;同时,对应包络谱中在太阳轮故障特征频率fs及其倍频nfs(n=1,2,3)、太阳轮绝对转频fsr处出现明显谱峰。据此可判断太阳轮发生了故障,这与仿真结果相吻合。

图4 MVMD中最佳分解参数的确定Fig.4 Determining the optimal decomposition parameters in MVMD algorithm

图5 混合故障仿真信号的MVMD分解结果Fig.5 The MVMD decomposition results of simulation signal
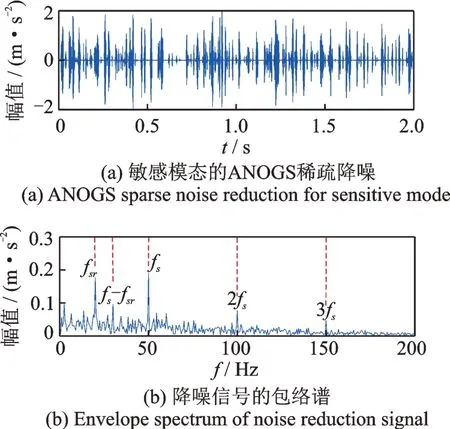
图6 本文MVMD-ANOGS方法对仿真信号处理结果(p=0.18,γ=0.13)Fig.6 The processing results of simulation signal obtained by MVMD-ANOGS method(p=0.18,γ=0.13)
为验证本文方法获取VMD最佳参数组合[K*,α*]=[7,3000]的可靠性,人为随机选择一组分解 参 数[10,2500],使 用 更 改 参 数 后VMD和ANOGS算法对混合故障仿真信号进行处理。图7为非最优参数下获取的分析结果。由图7可知,模态信号经ANOGS降噪后,虽然时域信号中故障冲击成分被提取出来,但其包络谱中无关成分的干扰仍然较为严重,仅能看到不突出的太阳轮故障特征频率及其2倍频,处理效果不如本文方法。上述结果表明,人为主观参数选取会对VMD分解产生严重影响,导致分解的模态中不能提取清晰丰富的故障信息。而本文方法能有效地避免这些现象,自适应准确地实现最佳模态分解,便于后续的分析与处理。
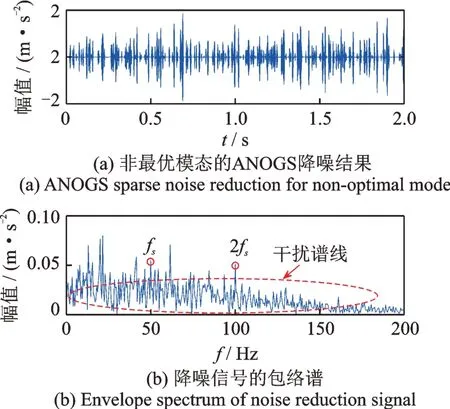
图7 更改参数后的分析结果(p=0.49,γ=0.22)Fig.7 Analysis results of simulation signal after changing the optimized parameters(p=0.49,γ=0.22)
作为对比,分别利用EEMD方法和FSK方法对混合故障仿真信号进行处理。图8为EEMD分解的前6个IMF分量。可以观察到,经EEMD分解后,仅在IMF3的包络谱中出现了太阳轮故障特征频率成分,但这未能提供足够的证据来准确判别太阳轮故障。图9为FSK方法处理后的结果。由图9可以看到,滤波后信号中并没有呈现出明显的故障冲击特征,对应包络谱中频率成分较为复杂,很难辨识太阳轮故障特征频率。对比图6中MVMDANOGS分析结果,上述2种方法都难以提取到明显的太阳轮故障特征信息,处理结果不理想。
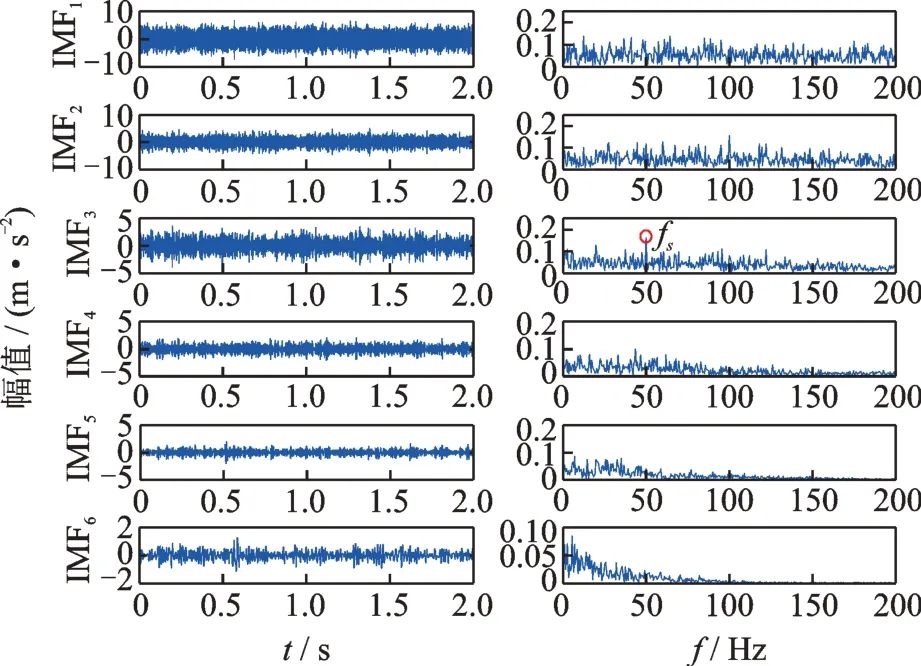
图8 EEMD对仿真信号分析结果(前6个IMF分量)Fig.8 Analysis results of simulation signal by EEMD(The first six IMF)
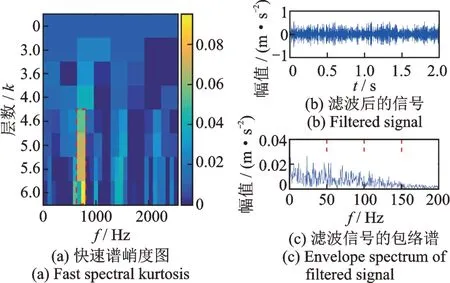
图9 快速谱峭度方法对仿真信号分析结果Fig.9 Analysis results of simulation signal by FSK method
5 实验验证
5.1 实验说明
为检验所提方法在实际行星齿轮箱故障诊断中的有效性,在Spectra Quest公司研发的工业动力传动故障诊断综合实验台上开展行星齿轮箱故障实验,实验系统如图10所示。该实验台主要由交流驱动电机、行星齿轮箱、2级平行轴齿轮箱与磁力加载器等组成。行星齿轮箱参数如表2所示。为模拟齿轮局部损伤,通过线切割技术在太阳轮和行星轮的某个轮齿上沿着齿根且垂直于轮齿中心线的方向加工宽为0.15 mm,深为1 mm的微小贯通裂纹作为故障,故障齿轮如图11所示。此次实验使用PCB352C33型加速度传感器收集故障振动信号。传感器固定在行星齿轮箱壳体顶部的垂直、水平和轴向测点上。选用DT9837数据转换仪和一台安装DAQ软件的笔记本电脑作为本次实验的数据采集系统。实验时,行星齿轮箱恒定输入转速为1200 r/min(即fsr=20 Hz),数据采样频率设置为5120 Hz,所用信号长度为10240点。在该实验条件下,计算行星齿轮箱中各齿轮故障特征频率如表3所示。
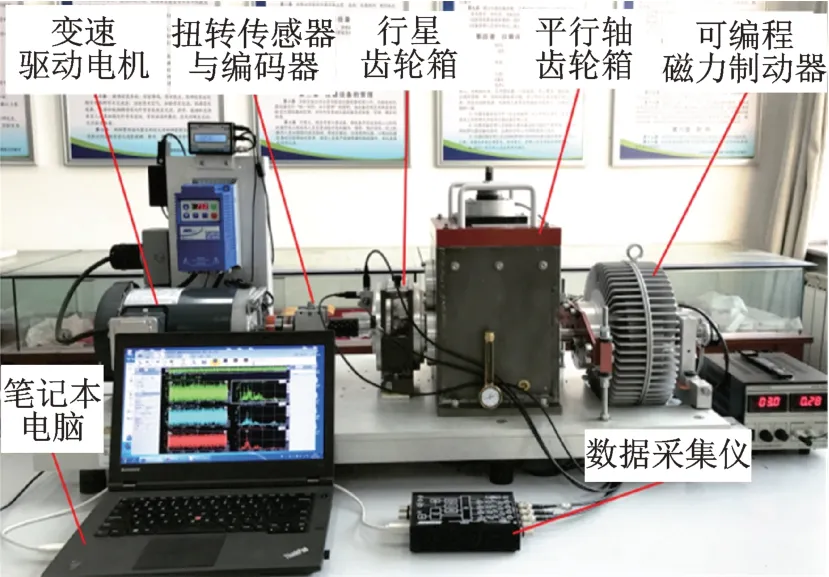
图10 行星齿轮箱实验系统Fig.10 Planetary gearbox test bench

表2 行星齿轮箱结构参数Tab.2 Planetary gearbox configuration parameters
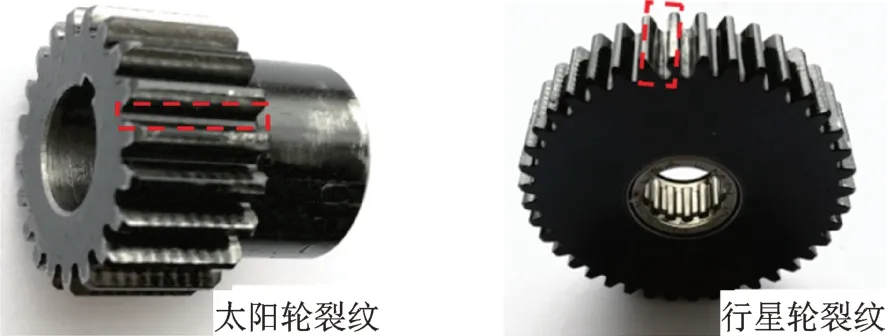
图11 齿轮故障件Fig.11 Tested gear faulty parts

表3 行星齿轮箱中齿轮特征频率Tab.3 Characteristic frequencies of gears in planetary gearbox
5.2 实测信号分析
5.2.1 太阳轮故障信号
图12为太阳轮齿根裂纹故障信号时域波形及其FFT频谱和包络谱。由图12可知,时域波形中出现一些杂乱的峰值,但未见局部故障激发的明显周期性冲击。频谱中在2倍啮合频率2fm处峰值比较凸出,但由于强背景噪声的影响,其两侧的调制频率已基本被淹没。包络谱中除了可识别到太阳轮绝对转频fsr和行星架转频的倍频nfc(n=7,10,13)成分外,在太阳轮故障特征频率处无突出的峰值。因此,采用传统的时、频域分析和包络谱方法对太阳轮早期故障信号进行分析难以取得满意的结果。

图12 太阳轮齿根裂纹故障信号Fig.12 Fault signal of sun gear tooth root crack
为了揭示隐藏在动态信号中的太阳轮早期微弱故障征兆,利用本文方法对太阳轮故障信号进行分析。首先,计算太阳轮故障信号的尺度空间谱,如图13(a)所示。可以看到,尺度空间谱根据太阳轮故障信号特征自适应划分的模态分割边界(如图13(a)中红色点划线所示)及模态数目为8。因此,MVMD算法中最佳模态个数取值K*=8。然后,设置惩罚因子α的搜索区间为[1500,4000],利用峭度最大化原则选取最佳参数。惩罚因子与峭度最大值之间的关系如图13(b)所示,当α=1600时取得峭度最大值,所以获取最佳惩罚因子为α*=1600。确 定 最 佳 参 数 组 合[K*,α*]=[8,1600]后,采 用MVMD对太阳轮故障信号进行最优模态分解,获得的8个模态分量如图14所示。根据敏感模态确定准则,选取峭度最大的u8作为敏感模态。最后,利用ANOGS算法对敏感模态u8进行自适应稀疏降噪处理,降噪模态信号及其包络谱如图15所示。可以看到,降噪后隐藏在动态信号中的微弱故障冲击特征得到增强且被清晰地揭示出来,噪声及其他干扰成分得到明显抑制。同时,在其对应包络谱中太阳轮故障特征频率的n/(3fs)(n=1,2,…,6)倍频处出现明显的谱线(实际齿轮箱中,3个行星轮不可能完全相同,这种差异使3个行星轮与太阳轮啮合时产生的故障冲击被视作3个不同的冲击,因此会出现n/3倍的太阳轮故障频率成分)。因此,上述分析结果表明太阳轮发生了局部损伤,这与实验设置相一致。

图13 MVMD中最佳分解参数的确定Fig.13 Determining the optimal parameters of MVMD

图14 太阳轮故障信号的MVMD分解结果Fig.14 MVMD decomposition results of sun gear fault signal

图15 本文MVMD-ANOGS方法太阳轮故障信号处理结果(p=0.50,γ=0.01)Fig.15 The processing results of sun gear fault signal obtained by MVMD-ANOGS method(p=0.50,γ=0.01)
为验证获取的最优参数组合[K*,α*]=[8,1600]在实际行太阳轮早期故障信号中的可靠性,随机选取一组分解参数[10,2200],利用更改参数的VMD和ANOGS算法对太阳轮故障信号进行分析。图16为非最优参数下取得的分析结果。虽然降噪模态的时域波形中出现了冲击特征,但在其包络谱中仅能提取到n/(3fs)(n=2,3,4)倍的太阳轮故障特征频率成分,且存在许多未知谱线,这对准确判别故障非常不利。分析表明,随机参数选取会对VMD分解产生严重影响,导致分解模态中不能有效提取太阳轮早期故障特征信息。而本文方法能避免这些现象,自适应准确地实现最佳模态分解,从而提取更加清晰丰富的故障特征。
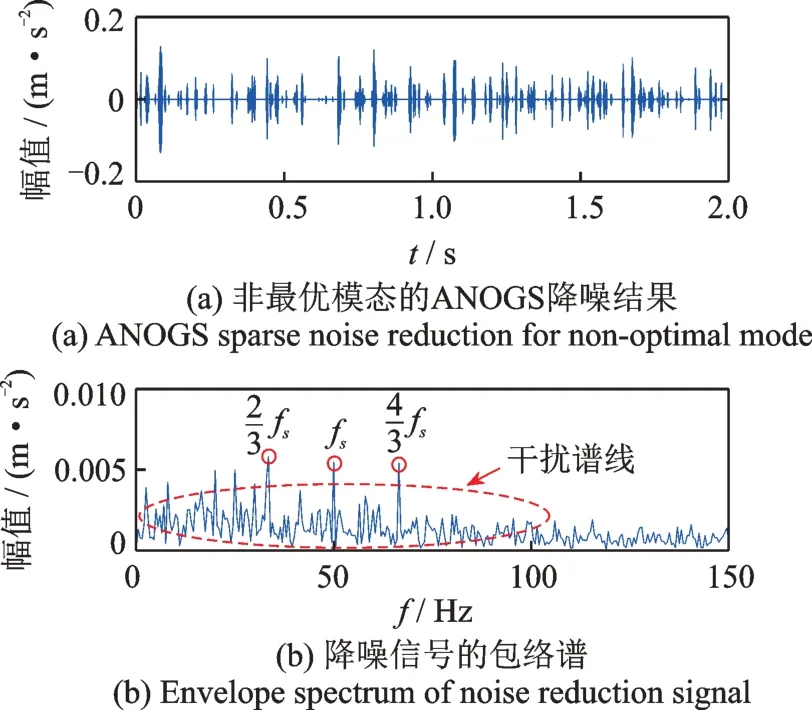
图16 更改参数后的分析结果(p=0.61,γ=0.02)Fig.16 Analysis results of sun gear fault signal after changing the optimized parameters(p=0.61,γ=0.02)
作为对比,分别采用EEMD方法和FSK方法对太阳轮早期故障信号进行处理。图17为EEMD获取的前7个IMF分量。可以看出,EEMD得到的模态信号时域波形中并未提取出明显的故障冲击特征;同时,在对应的包络谱中仅提取到行星架转频和太阳轮绝对转频的倍频成分,太阳轮故障特征频率处无明显谱线。图18为FSK方法的分析结果。由图18可知,经FSK滤波后信号中出现了强弱不等的冲击特征,但这些冲击的周期性并不清晰。在滤波信号的包络谱中,仅可以看到行星架转频的倍频及4/3fs倍的太阳轮故障特征频率。对比可知,EEMD方法和FSK方法都难以将太阳轮故障激发的微弱周期性冲击特征清晰地提取出来,处理结果不如图15中本文方法理想。
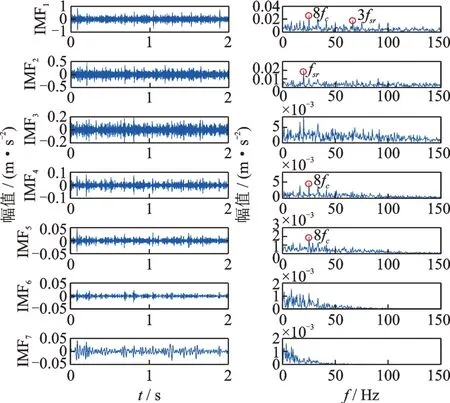
图17 EEMD对太阳轮故障信号分析结果(前7个IMF)Fig.17 Analysis results of sun gear fault signal by EEMD(the first seven IMF)
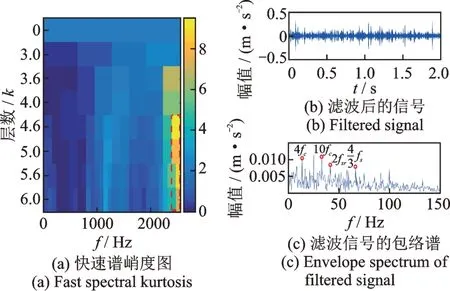
图18 快速谱峭度方法对太阳轮故障信号的分析结果Fig.18 Analysis results of sun gear fault signal by FSK method
5.2.2 行星轮故障信号
图19为行星轮齿根裂纹故障信号时域波形及其FFT频谱和包络谱。由图19可知,时域信号中行星轮局部故障引起的微弱周期性冲击已被强噪声所掩盖,从其频谱和包络谱中均无法识别到表征行星轮故障的频率信息。因此,传统的时、频域分析及包络谱方法无法对行星轮早期故障进行有效合理的诊断。
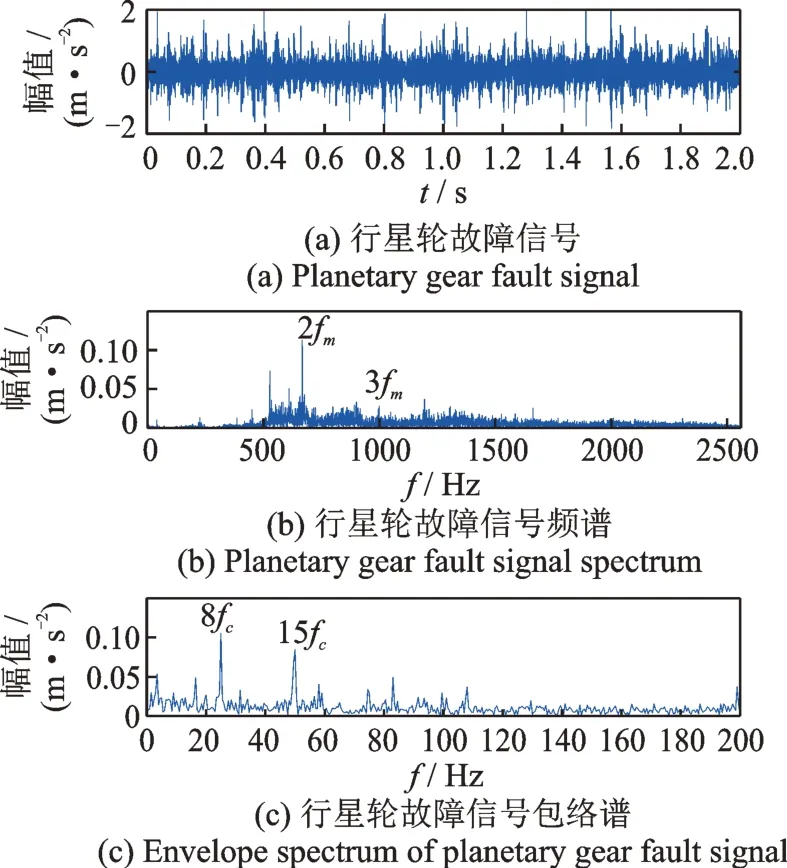
图19 行星轮齿根裂纹故障信号Fig.19 Fault signal of planetary gear tooth root crack
对行星轮故障信号应用本文方法进行特征提取。图20(a)为行星轮故障信号的空间尺度谱表示。由图20(a)可知,根据行星轮故障信号特征,空间尺度谱自适应划分模态的分割边界并确定出8个有意义的模态分量。因此,设定MVMD中最佳模态个数为K*=8。图20(b)为惩罚因子与峭度最大值之间的关系,当α=1800时取得峭度最大值,所以确定最佳惩罚因子为α*=1800。在最佳参数组合[K*,α*]=[8,1800]下,利用MVMD对行星轮故障信号进行最优模态分解,获取的8个模态分量如图21所示。根据敏感模态筛选准则,选取峭度最大的模态u8作为敏感模态。进一步地,利用提出的ASCSD算法对u8进行稀疏降噪,降噪模态信号及其包络谱如图22所示。可以观察到,降噪后表征行星轮故障的周期性冲击特征得到突显且被清晰地提取出来,噪声及其他干扰被有效抑制;同时,在相应包络谱中行星轮故障特征频率的倍频nfp(n=2,3,6,8,9,13,15)处呈现出较明显的谱峰。上述分析结果表明行星轮出现了故障,这与实验设置相符。

图20 MVMD中最佳分解参数的确定Fig.20 Determining the optimal parameters of MVMD

图21 行星轮故障信号的MVMD分解结果Fig.21 MVMD decomposition results of planetary gear fault signal

图22 本文MVMD-ANOGS方法行星轮故障信号处理结果(p=0.23,γ=0.01)Fig.22 The processing results of planetary gear fault signal by MVMD-ANOGS method(p=0.23,γ=0.01)
为验证最佳参数组合[K*,α*]=[8,1800]在实际行星轮早期故障诊断中的可靠性,随机选取参数组合[5,1200],利用更改参数后的VMD和ANOGS方法对行星轮故障信号进行处理。图23为非最优参数下获取的处理结果。可以看到,虽然降噪模态的时域波形中出现幅值较大的冲击,但其对应的包络谱中存在许多无关干扰频率,仅能识别出3倍和6倍的行星轮故障特征频率成分,且谱线的整体幅值水平低于图22(b)。分析表明,随机参数选取导致VMD分解结果无法得到保障,从而不能在其分解的模态中提取清晰丰富的行星轮故障特征信息。而本文方法能避免这些现象,自适应准确地实现最佳模态分解,从而更有利于早期故障特征的识别。
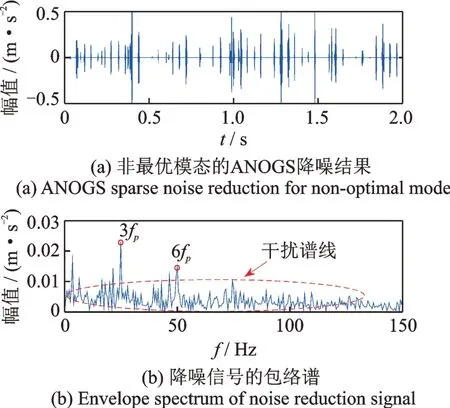
图23 更改参数后的分析结果(p=0.81,γ=0.04)Fig.23 Analysis results of simulation signal after changing the optimized parameters(p=0.81,γ=0.04)
作为对比,分别采用EEMD方法和FSK方法对行星轮故障振动信号进行处理。图24为EEMD方法分解的前7个IMF分量。由图24可知,获取分量的时域波形中冲击特性并不明显,对应IMF1和IMF3分量的包络谱在行星轮故障特征频率的倍频处出现微小谱峰,但其他无关频率的幅值较为突出,不利于故障特征准确辨识。图25为FSK方法分析结果。可以看到,滤波后时域波形中出现了部分幅值较大的冲击成分,在滤波信号的包络谱中,虽然可以提取到行星轮故障特征频率的倍频,但整个谱图中杂乱谱线较多,干扰特征频率的识别。与图22中本文方法对比可知,EEMD和FSK方法虽可以提取部分故障特征,但其在噪声抑制和抗干扰方面表现不足,无法将微弱的行星轮故障特征清晰地提取出来。
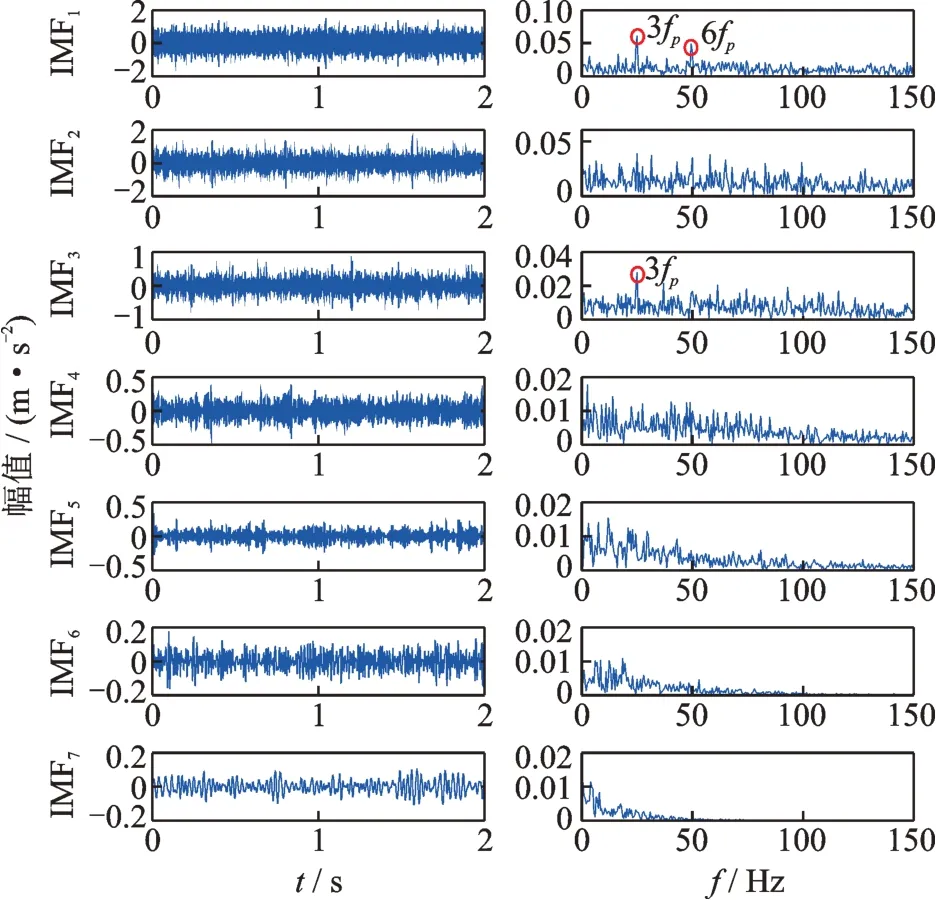
图24 EEMD对行星轮故障信号分析结果(前7个IMF)Fig.24 Analysis results of planetary gear fault signal by EEMD(the first seven IMF)
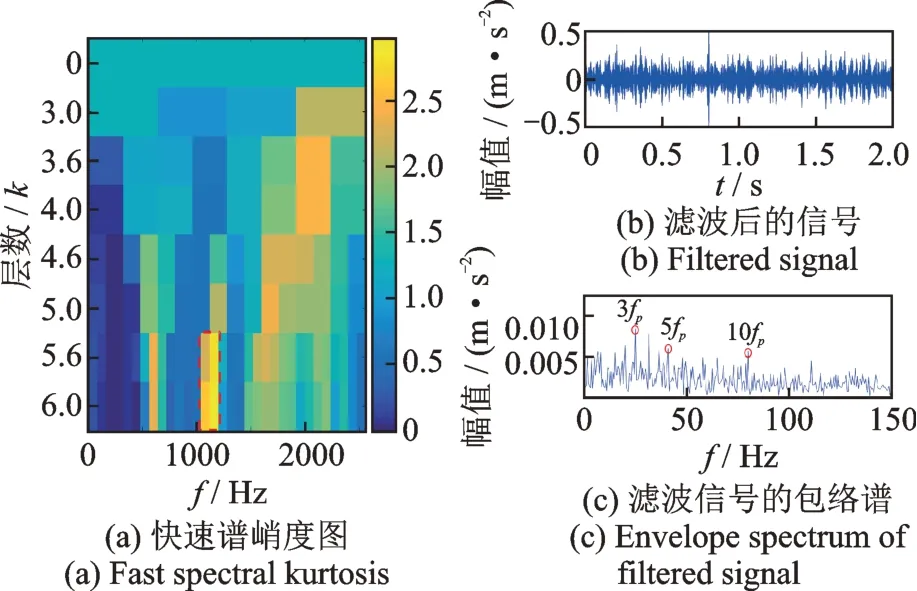
图25 快速谱峭度方法对行星轮故障信号的分析结果Fig.25 Analysis results of planetary gear signal by FSK method
6 结论
本文提出了一种基于MVMD-ANGOS的早期故障诊断方法,并将其应用于强背景噪声下行星齿轮箱微弱故障特征提取中。通过信号仿真和工程实验数据的分析可知,该方法能够显著提升微弱的周期性故障冲击特征,在行星齿轮箱早期故障诊断和预测中具有一定的优势。
(1)MVMD方法能够自适应获取分解所需的最佳模态个数K和惩罚因子α且具有理论依据,有效解决了VMD中主要影响参数选取需要依赖人为经验与先验准则的不足,实现了模态最优分解。
(2)提出的ANGOS算法能够对敏感模态进行自适应稀疏降噪,最大限度地消除噪声和其他无关成分的干扰,从而突显模态中微弱的故障冲击特征,提高了故障诊断的精确度和鲁棒性。
(3)通过与传统的VMD,EEMD和快速谱峭度方法对比,本文方法能提取到更加清晰明显的故障特征频率成分且故障表征能力得到提高,实现了行星齿轮箱早期故障的准确识别与诊断,为实际工程应用提供了一种思路。