弱通讯条件下水下航行器编队行为分析
2022-01-10苏浩秦郭明禹张子俊卢曼曼
吕 达,苏浩秦,2,郭明禹,张子俊,卢曼曼
(1.中国航天空气动力技术研究院, 北京 100074; 2.彩虹无人机科技有限公司, 北京 100074)
1 引言
多水下航行器编队控制是近年来热门的研究方向。编队控制的思想来源于人类对于自然界的观察,自然界中的鸟类、鱼类等群体普遍存在编队行为,这种编队行为能使动物群体更有效地抵御入侵或捕获猎物。同样,利用多个水下航行器在空间中的编队,可以提高水下航行器系统的工作效率,扩大其工作范围;并且利用水下航行器编队内资源的冗余性,可以增强水下航行器系统的容错性、鲁棒性和灵活性。目前主流的水下航行器编队控制策略主要有传统主从编队控制策略[1-3]基于人工势场编队控制策略[4-6]、虚拟刚体结构编队控制策略[7-8]、基于行为编队控制策略[9-10]、分布式编队控制策略[11-12]等等。
对于传统主从式编队控制,即在水下航行器编队中指定一个航行器作为领航者,其余航行器作为跟随者,跟随者获取领航者的运动状态并以此作为参考,根据自身在编队中与领航者的相对位置,以一定的空间距离跟随领航者航行。
假设在编队中有m个水下航行器,假定第i个水下航行器为AUVi(i=1,2,…,m)。不妨令AUV1为领航者,AUV1通过水声通讯机向其余水下航行器广播其位置信息,AUVi(i=2,…,m)的任务计算机通过AUV1坐标为参考,计算出AUVi的期望位置的表达式为:

(1)
式(1)中:GPS_x(i),GPS_y(i),GPS_z(i)分别为AUVi的3个坐标;l_x(1,i),l_y(1,i),l_z(1,i)分别为AUVi相对于AUV1的3个坐标差。
对于有3个水下航行器的编队,其通讯结构如图1所示。
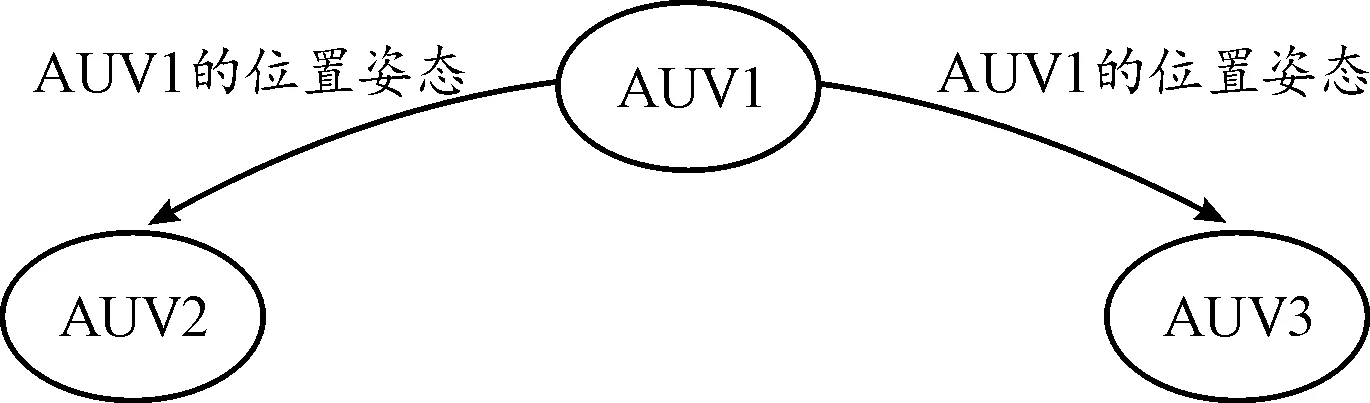
图1 传统主从式编队策略通讯结构示意图Fig.1 communication structure of traditional master-slave formation strategy
传统主从式编队控制策略结构简单,易于实现,是目前科学研究以及工程实现比较常用的方法。但是该方法对于各水下航行器的通讯要求比较高,从航行器存在由于距离或盲区等原因收不到主航行器水声信号的问题,且主航行器通讯消耗的能量较大,容易造成能源消耗不均,主航行器在极端情况下一旦发生故障,航行器编队很难继续进行作业。因此,可靠性较高的非主从式编队策略具备很高的研究价值与应用需求。
2 弱通讯非主从编队控制策略介绍
2.1 编队策略
本文提出一种弱通讯条件下的非主从编队控制策略,具体为:假设在编队中有m个水下航行器,假定第i个水下航行器为AUVi(i=1,2,…,m)。各个航行器在定速航行时按照预先设计的轨迹航行,不是时刻进行通讯,只在固定的时间间隔进行通讯以校正各航行器在队形中的位置,且当航行器编队需要进行一定编队动作时,开始进行通讯,随机指定一个临时“机动发起者”,不妨设为AUV1,AUV1将自身位置和姿态信息发送给AUV2作为参考,AUV2根据此信息解算出自身期望的位置;AUV2再将自身的位置和姿态信息发送给AUV3,AUV3再发送给AUV4,依次类推,AUVm-1发送给AUVm,形成一个链型的通讯拓扑结构,如图2所示。

图2 弱通讯非主从编队策略通讯拓扑结构示意图Fig.2 Communication structure of weak communication non master-slave formation strategy
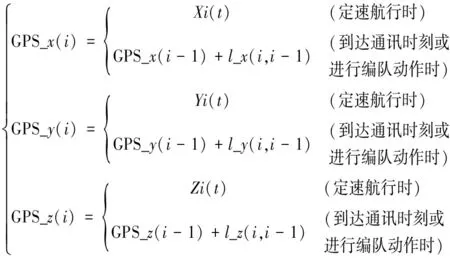
第i个水下航行器位置的期望表达式为:
(2)
式(2)中:GPS_x(i),GPS_y(i),GPS_z(i)分别为AUVi的3个坐标;l_x(i,i-1),l_y(i,i-1),l_z(i,i-1)分别为AUVi相对于AUVi-1的3个坐标差;Xi(t),Yi(t),Zi(t)分别为AUVi的预定航线的3个坐标值。
2.2 通信故障处理机制
当编队中某一个航行器发生故障不能正常通信时,只需将其后面所有的航行器的编号都减1,可以继续完成后续编队的动作,具体为:不妨假设编队中的AUVk发生故障,那么AUVk+1在之后的编队中就变为AUVk,接收AUVk-1发出的位置信息,AUVk+2就变为AUVk+1,接收AUVk发出的位置信息,依次类推,可以继续完成后续编队的动作,当编队动作执行完成后,各航行器的通讯终止,继续各自沿各自预先期望轨迹航行。
3 水下航行器编队行为分类
为了方便水下航行器的编队任务管理,根据几种常见的编队航行模式的特点,将水下航行器编队航行归纳为3种编队行为:定速航行、编队转弯以及队形转换。
定速航行即编队内所有航行器保持相对位置不变,朝同一方向以同一速度航行。定速航行是AUV编队最常见的编队行为,任何编队的保持都需要实现编队的定速航行,在此基础上才能实现更复杂的编队动作。定速航行最需要注意的问题是航行轨迹的保持,对于传统主从式编队控制策略而言,主航行器由于始终与各从航行器保持通讯,从而实时校正各航行器在编队中的位置,所以航行轨迹保持的难度较低,各航行器的航迹偏差主要取决于各从航行器;弱通讯条件下,航行器之间在定速航行时并不时刻通讯,这样各航行器由于受扰动而并不容易保持直线轨迹,因此,需要在固定的时间间隔进行通讯,以校正各航行器在队形中的位置。
编队转弯即编队内的各个航行器向同一方向转过同一角度,转弯完成之后和转弯完成之前航行器的队形不变。编队转弯是水下航行器编队的重要组成内容,在一般的编队任务中,编队转弯出现的频率仅次于编队定速航行,其应用领域包括固定海域扫海探测、障碍物躲避以及目标跟踪监视。以3个航行器的编队为例,如图3和图4所示,编队转弯有2种转弯方式,分别为定速度转弯和变速度转弯,定速度转弯是各个航行器在转弯过程中走过的距离相等,速度不变,易于控制,缺点是各个航行器航迹有交叉,在外界扰动下容易发生碰撞;变速度转弯是各个航行器在转弯过程中比较严格的保持相对的位置关系,转弯过程中各个航行器的速度会有变化,由于变速度转弯各个航行器之间始终保持一定的位置关系,因此不易发生碰撞,但缺点是有可能导致各个航行器的能耗不均。
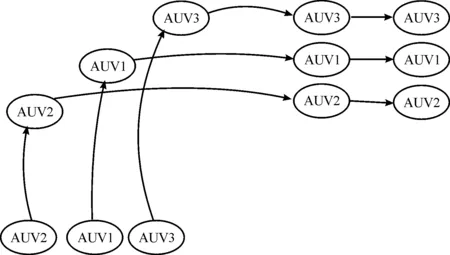
图3 定速度的横向编队转弯编队示意图Fig.3 Schematic diagram of lateral formation turning at constant speed

图4 变速度的横向编队转弯编队示意图Fig.4 Schematic diagram of lateral formation turning with variable speed
队形转换即航行器编队由一种队形形式转换为另一种队形形式。例如,图5所示的航行器编队由三角形队形转换为横向队形,图6所示的航行器编队由横向队形转换为纵向队形等。队形转换可使AUV编队的功能得到拓展,实现在不同的任务条件和航行环境下选择合适的编队队形,实现任务效率的提升以及环境适应性的增强。
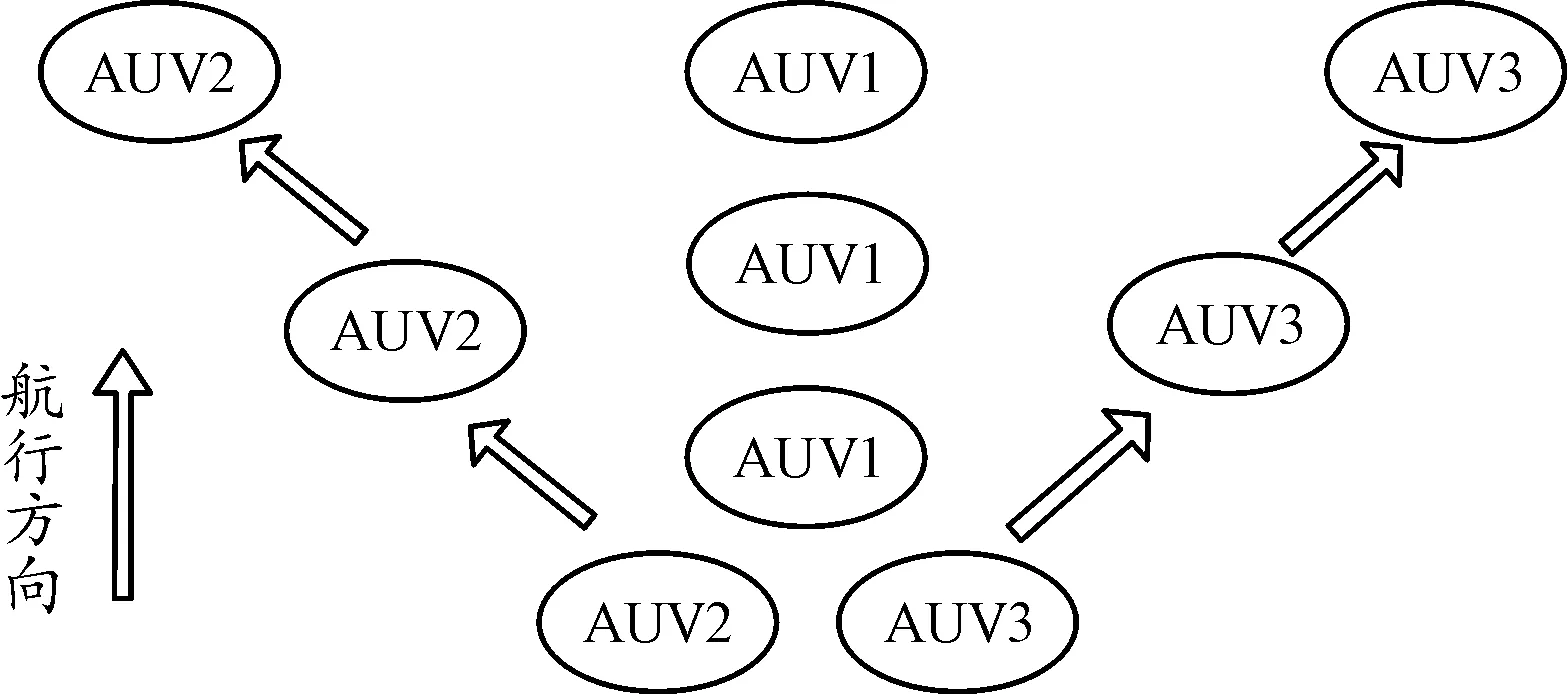
图5 AUV编队由三角形编队转换为横向编队示意图Fig.5 Schematic diagram of AUV formation transferring from triangular formation to transverse formation

图6 AUV编队由横向队形转换为纵向队形示意图Fig.6 Conversion of AUV formation from transverse formation to longitudinal formation
本文所仿真的3种编队队形在AUV实际编队任务中应用较为广泛,其中三角形队形具有队形纵深较小,机动灵活的优点,便于进行巡逻及警戒工作;横向队形可以增大航行器编队的侧扫声呐扫描面积以提高探测效率,便于进行海洋探测工作;纵向队形则便于进行避障,有利于提高穿越狭长水道的通行效率。同样以3个航行器编队为例,对于采用传统主从式的编队控制方法,假定AUV1为领航者,AUV2和AUV3为跟随者,且AUV1的预定航线的坐标值如式(3),对于斜边为120 m的等腰直角三角形队形,则根据式(1)可得到:AUV2和AUV3的期望坐标值即为式(4)和式(5)。对于航行器相邻间隔为120 m的横向队形,AUV2和AUV3的期望坐标为式(6)和式(7)。对于采用弱通讯非主从编队控制方法,假定AUV1为机动发起者,则在队形转换过程中,同样假设AUV1的预定航线的坐标值如式(3),则根据式(2)可得到:对于上述三角形队形,AUV2的期望坐标与传统主从式相同为式(4),AUV3的期望坐标为式(8)。对于横向队形,AUV2的期望坐标与传统主从式相同为式(6),AUV3的期望坐标为式(9)。

(3)

(4)

(5)
(6)
(7)

(8)

(9)
4 水下航行器编队行为仿真试验
4.1 对比仿真试验1:水下航行器编队定速航行
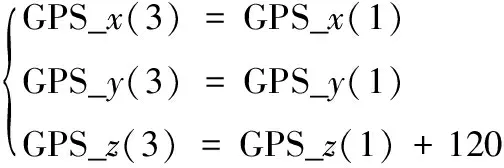
进行水下航行器编队行为的仿真试验,以3个航行器的编队为例,仿真试验设计如下:首先进行无干扰、无失联、且水声通讯无延时情况下航行器编队的定速航行仿真试验。该仿真试验模拟的情形为航行器编队沿预定航线定速直线航行,且保持为横向编队,航行器的速度为2 m/s。分别进行传统主从式编队控制方法和弱通讯非主从编队控制方法的仿真,仿真过程的基本信息设置如表1所示,且仿真过程中没有外力干扰,没有通讯故障。得到3个航行器在平面中的航行轨迹,如图7和图8所示。从图中可看出,在不考虑外界干扰以及没有通讯故障的情况之下,2种编队方法所呈现出的编队控制效果基本相同,说明2种方法均能实现对航行器编队的定速航行控制。

表1 仿真试验1基本信息设置

图7 无海浪干扰及通讯故障条件下传统 主从式三航行器编队的定速航行示意图Fig.7 Constant speed navigation of traditional master-slave three AUVs’ formation without wave interference and communication failure
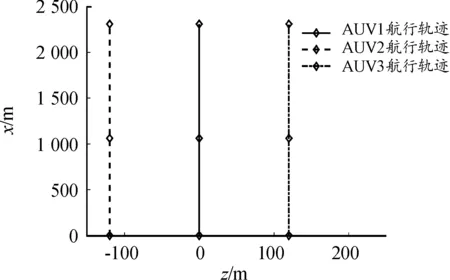
图8 无海浪干扰及通讯故障条件下弱通讯非 主从式三航行器编队的定速航行示意图Fig.8 Constant speed navigation of weak communication non master-slave three AUVs’ formation without wave interference and communication failure
其次进行有海浪干扰以及水声通讯延迟且航行过程中存在通讯故障情况下航行器编队的定速航行仿真试验。仿真试验设计如下:航行器沿预定直线进行速度为2 m/s的定速航行,且保持为横向编队,在时间为300 s时发生通讯故障,即传统主从式编队中各从航行器失去来自主航行器的信号,弱通讯非主从编队中某一航行器失去上位航行器的信号,且在航行过程中受到海浪的干扰,海浪干扰模型类似于文献[18-19],在仿真过程中,不考虑导航系统的误差,且由于水声通讯机声波传输速率的影响,通讯讯号无法实时到达目标AUV,假设声波在海水中的传输速率为vs,则传统主从式编队的第i个AUV由于信号传输而造成的通讯误差时间为:
(10)
式(10)中,ΔTi为第i个AUV的通讯延迟时间。
弱通讯非主从式编队的第i个AUV由于信号传输而造成的通讯误差时间为:
(11)
式(11)中,ΔTi为第i个AUV的通讯延迟时间。
仿真过程的基本信息设置如表1所示。得到3个航行器在平面中的航行轨迹如图9和图10所示。从图中可看出,传统主从式编队在失去通讯时,编队受到干扰较大,3个航行器受到不同程度的干扰,且未能保持横向编队;弱通讯非主从编队中航行器虽然也受到干扰,但因为航行器在不通讯时可以各航行器任务计算机预置的航线为参考,所以航行器的横向队形保持良好。
图9 海浪干扰及通讯故障条件下传统主从式 三航行器编队的定速航行示意图Fig.9 Constant speed navigation of traditional master-slave three AUVs’ formation under wave interference and communication failure

图10 海浪干扰及通讯故障条件下弱通讯非主从式 三航行器编队的定速航行示意图Fig.10 Constant speed navigation of weak communication non master-slave three AUVs’ formation under wave interference and communication failure
4.2 对比仿真试验2:水下航行器编队转弯仿真
进行三航行器编队的编队转弯仿真试验,首先进行无干扰、无通讯延迟以及无通讯失联情况下的编队转弯仿真。该仿真试验模拟的情形为航行器横向编队沿预定航线进行90°的编队转弯,编队转弯应避免航行器之间出现碰撞。首先采用定速度方式,分别进行传统主从式的编队控制方法和基于弱通讯的非主从编队控制方法的仿真,仿真过程的基本信息设置如表2所示,得到3个航行器在平面中的航行轨迹,如图11、图12所示。

表2 仿真试验2基本信息设置
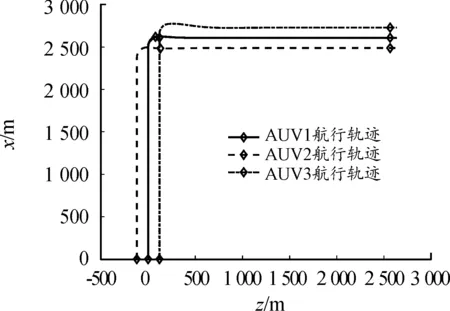
图11 无海浪干扰及通讯故障条件下传统主从式 三航行器编队的定速度转弯示意图Fig.11 Constant speed turning of traditional master-slave three AUVs’ formation without wave interference and communication failure
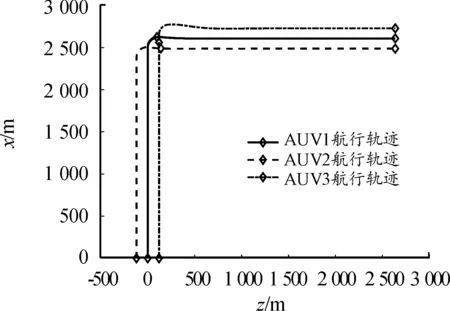
图12 无海浪干扰及通讯故障条件下弱通信的非主从式 三航行器编队的定速度转弯示意图Fig.12 Constant speed turning of non master-slave three AUVs’ formation with weak communication without wave interference and communication failure
其次考虑采用变速度转弯方式进行仿真试验,分别进行传统主从式的编队控制方法和基于弱通讯的非主从编队控制方法的仿真,仿真过程的基本信息设置见表2,得到3个航行器在平面中的航行轨迹,如图13、图14所示。综合图11-图14可知,2种方法在控制编队转弯方面效果差异不明显,均能很好地控制航行器编队进行90°的转弯,且转弯过程中航行器很好地避免了碰撞。

图13 无海浪干扰及通讯故障条件下传统主从式 三航行器编队的变速度转弯示意图Fig.13 Variable speed turning of traditional master-slave three AUVs’ formation without wave interference and communication failure
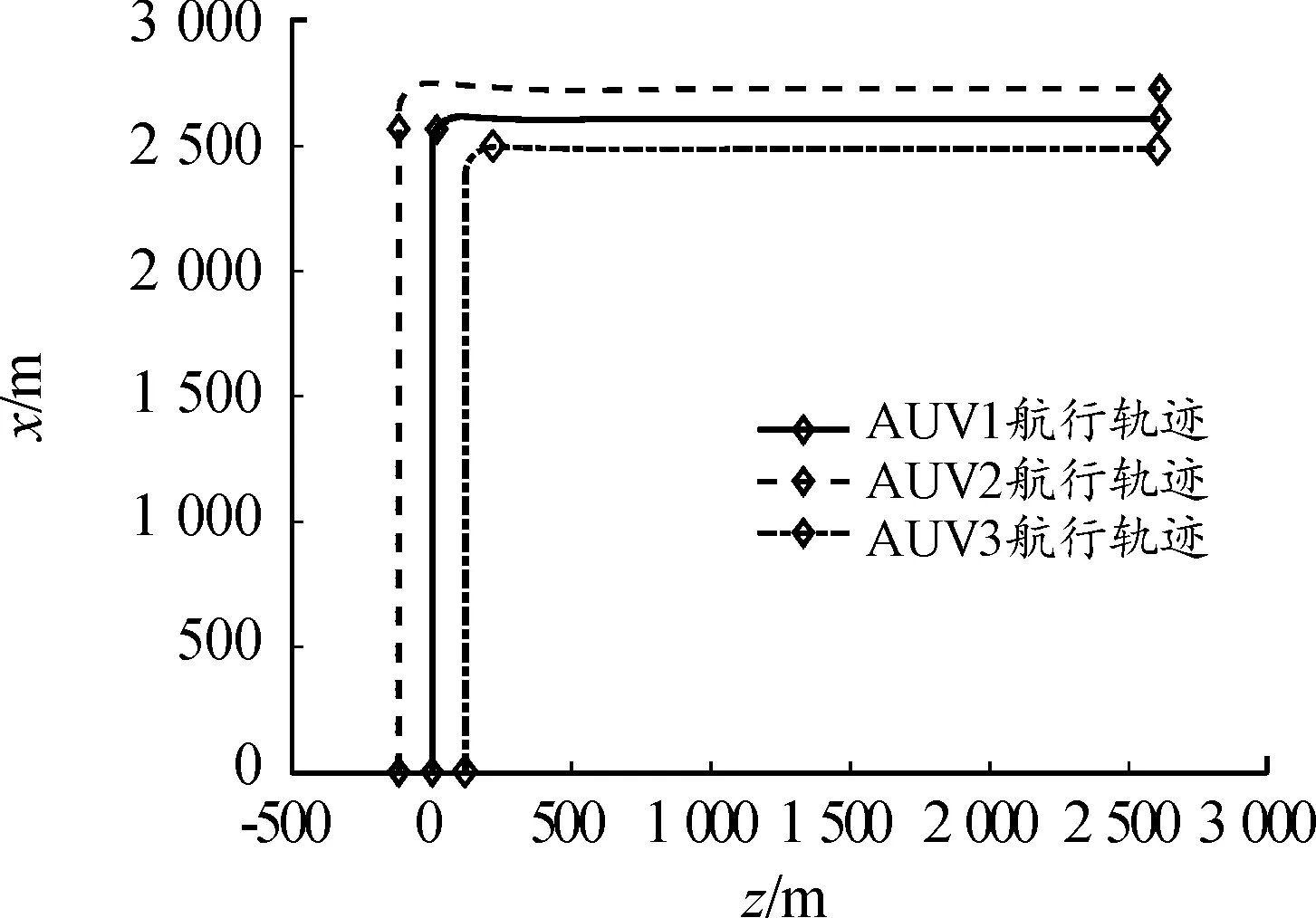
图14 无海浪干扰及通讯故障条件下弱通信非主从式 三航行器编队的变速度转弯示意图Fig.14 Variable speed turning of weak communication non master-slave three AUVs’ formation without wave interference and communication failure
继续进行有海浪干扰、通讯延迟以及航行过程中存在通讯故障情况下航行器编队的编队转弯仿真试验。仿真试验设计如下:航行器横向编队沿预定航线进行90°的编队转弯,且保持为横向编队,在时间为1 000 s时发生通讯故障,此时刻为航行器编队开始进行转弯时,即传统主从式编队中各从航行器失去来自主航行器的信号,弱通讯非主从编队中某一航行器失去上位航行器的信号,假设航行器2失去航行器1的信号,仿真过程中受到海浪的干扰,且考虑水声通讯延迟的影响,传统主从式编队的第i个AUV的通讯延迟为式(10),弱通讯非主从式编队的第i个AUV的通讯延迟为式(11),不考虑导航系统的误差,仿真过程的基本信息设置见表2。3个航行器在平面中定速度转弯的航行轨迹如图15、图16所示,变速度转弯的航行轨迹如图17、图18所示。从图中可看出,传统主从式编队在失去通讯时,编队受到干扰较大,在经历编队转弯后,3个航行器未能保持横向队形;弱通讯非主从编队中航行器1受到海浪干扰脱离编队,但航行器2和航行器3仍旧能够保持在同一条垂直于航迹的直线上,航行器的横向队形保持良好。
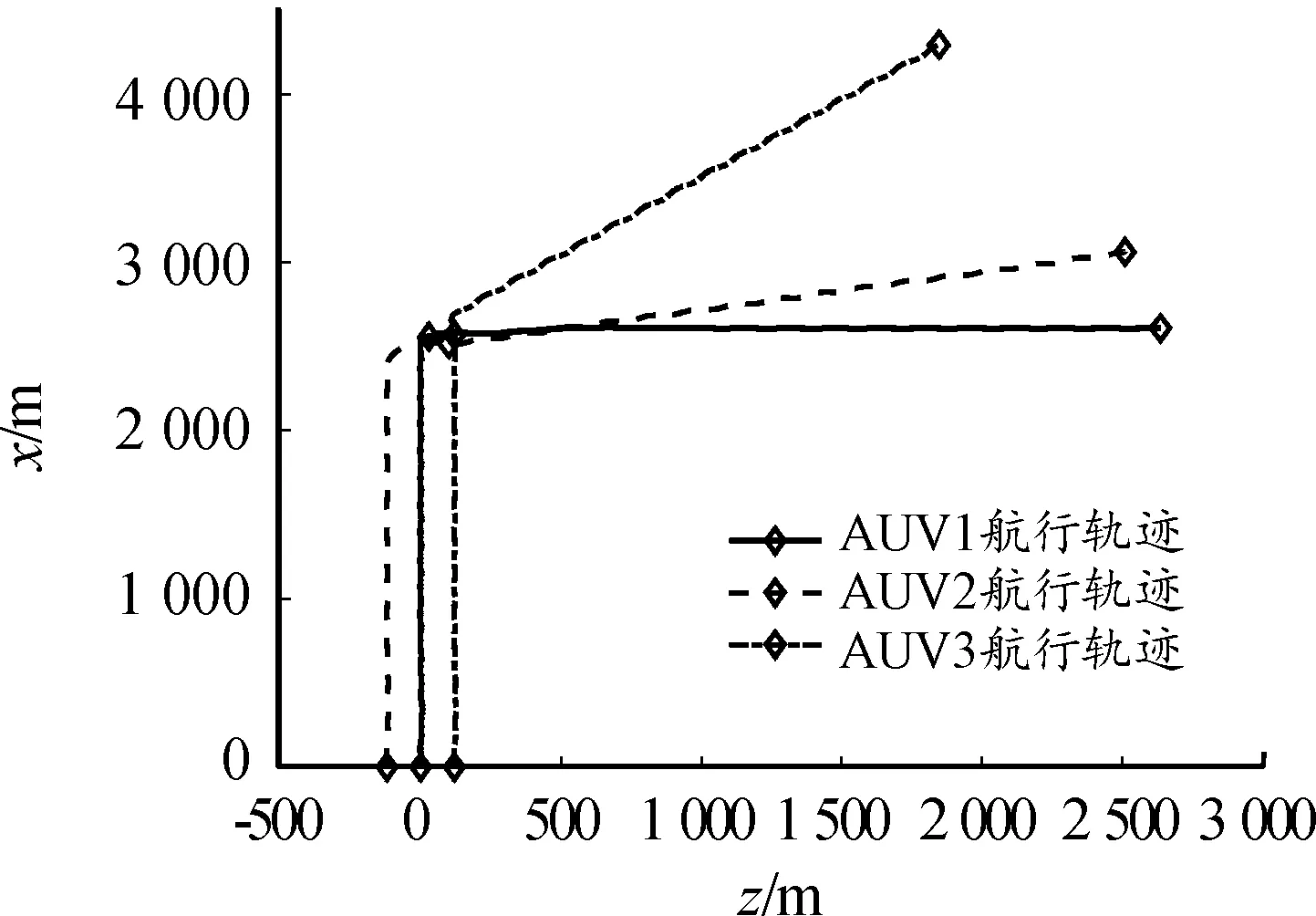
图15 海浪干扰及通讯故障条件下传统主从式 三航行器编队的定速度转弯示意图Fig.15 Constant speed turning of traditional master-slave three AUV’s formation under wave interference and communication failure

图16 海浪干扰及通讯故障条件下弱通讯非主从式 三航行器编队的定速度转弯示意图Fig.16 Constant speed turning of weak communication non master-slave three AUVs’ formation under wave interference and communication failure
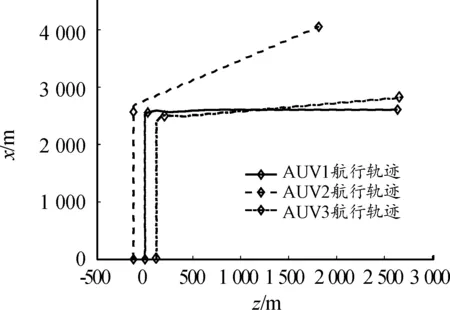
图17 海浪干扰及通讯故障条件下传统主从式 三航行器编队的变速度转弯示意图Fig.17 Variable speed turning of traditional master-slave three AUVs’ formation under wave interference and communication failure

图18 海浪干扰及通讯故障条件下弱通讯非主从式 三航行器编队的变速度转弯示意图Fig.18 Variable speed turning of weak communication non master-slave three AUVs’ formation under wave interference and communication failure
4.3 对比仿真试验3:水下航行器编队队形转换仿真
进行三航行器编队的队形转换仿真试验,首先进行没有海浪干扰、通讯延迟以及通讯故障时的仿真,该仿真试验模拟的情形为航行器编队沿预定航线进行队形转换,分别进行了传统主从式编队控制方法和弱通讯非主从编队控制方法的仿真,仿真过程的基本信息设置如表3所示,得到航行器在平面中的航行轨迹,如图19~图22所示。图19和图20展示了航行器由三角形队形转换为横向队形,图21和图22展示了航行器由横向队形转换为纵向队形,根据不同任务类型和航行条件选择合适的编队方式是航行器编队队形转换的主要作用。通过图19与图20,图21与图22的对比可以得出以下结论:采用传统主从式编队控制策略的队形转换过程中,因为各从航行器有且只有一个主航行器作为参考点,所以其队形转换过程响应更为迅速,且其轨迹规划更为合理。而对于弱通讯非主从编队控制策略,由于其在队形转换的过程中各航行器有着不同的参考点,且与机动发起航行器是间接通讯关系,故其队形转换过程的响应速度及轨迹规划合理性均不及主从式方法,处于通讯链末端的航行器尤为明显,体现在图中即为航行器编队的整体轨迹难以保持对称,且通讯链末端的航行器走过的路程较长。
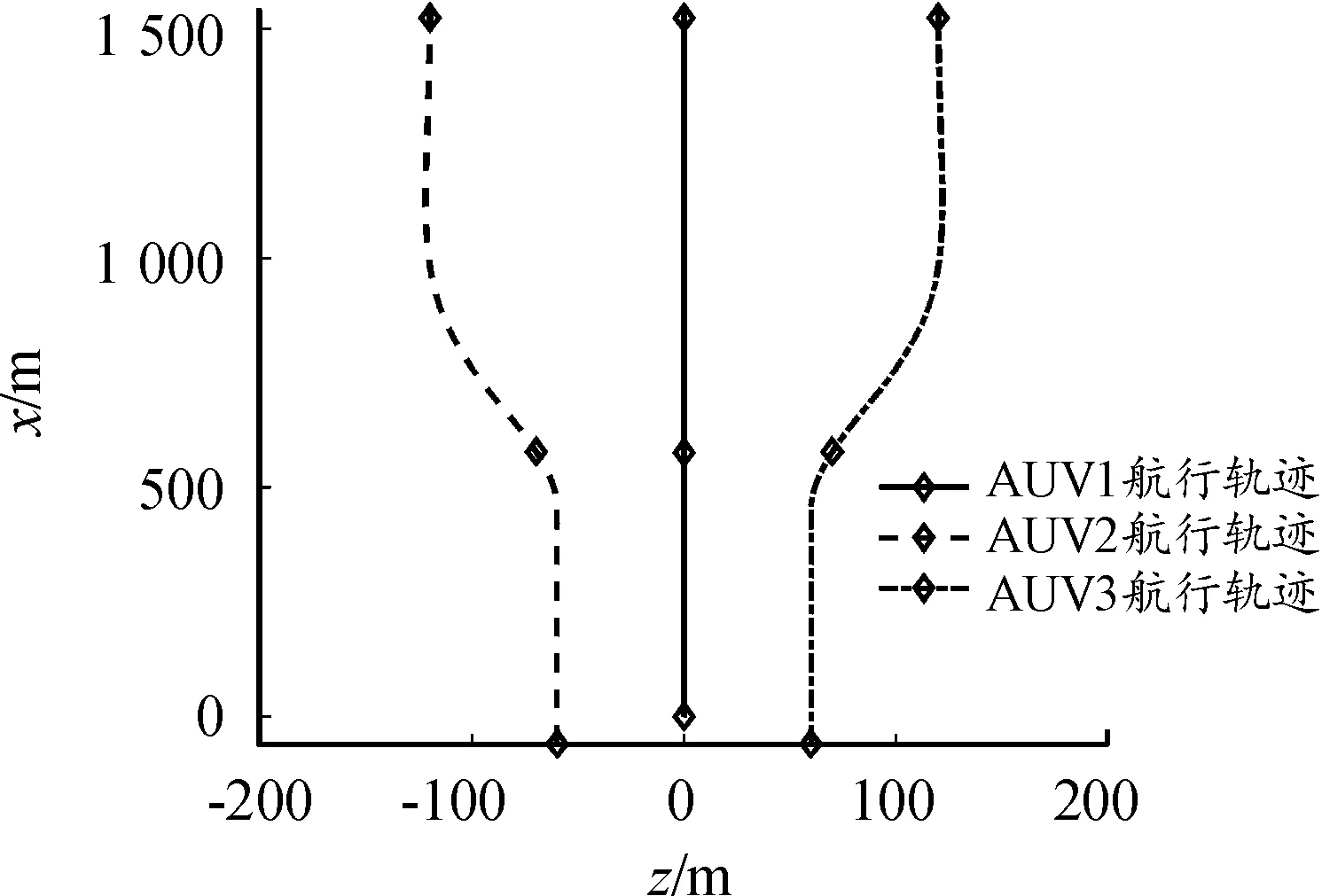
图19 无海浪干扰及通讯故障条件下传统主从式 三航行器编队的三角队形-横向队形转换示意图Fig.19 Triangular formation lateral formation conversion of traditional master-slave three AUVs’ formation without wave interference and communication failure
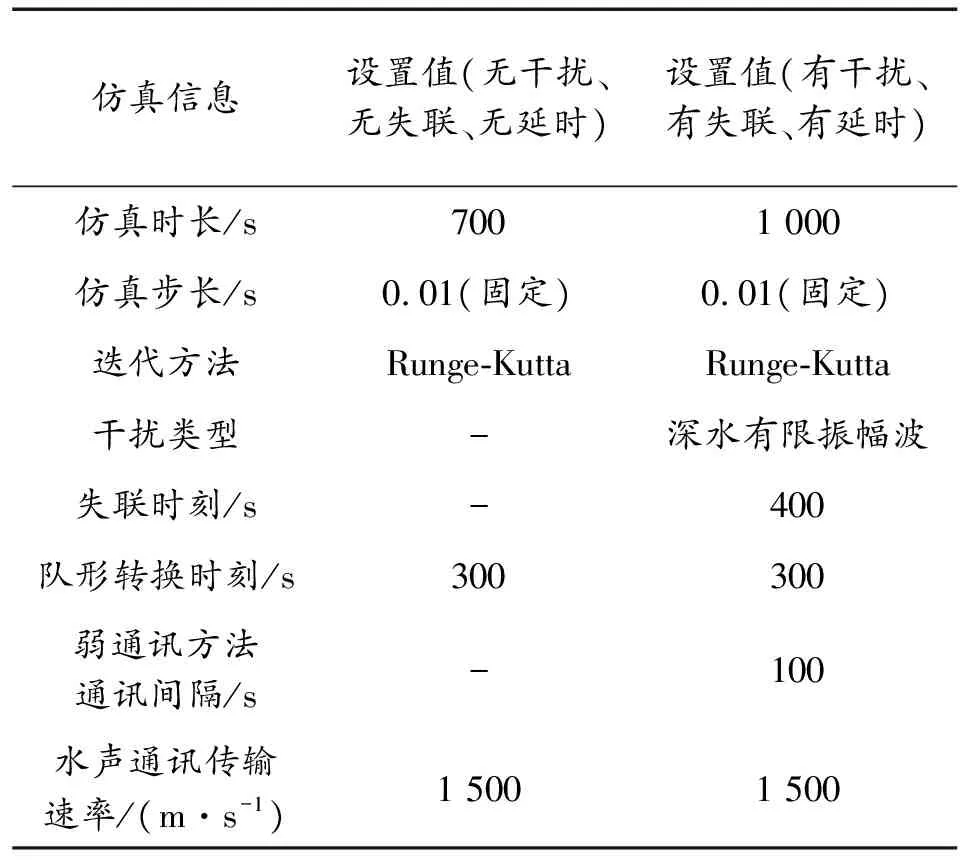
表3 仿真试验3基本信息设置Table 3 Basic information setting of simulation test 3
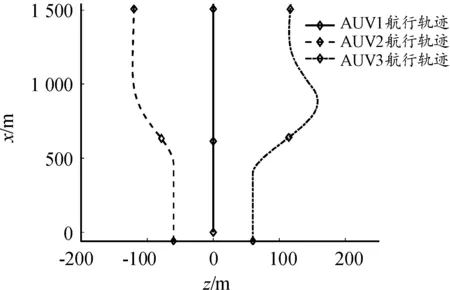
图20 无海浪干扰及通讯故障条件下弱通信非主从式 三航行器编队三角队形-横向队形转换示意图Fig.20 Triangular formation lateral formation conversion of weak communication non master-slave three AUVs’ formation without wave interference and communication failure

图21 无海浪干扰及通讯故障条件下传统主从式 三航行器编队的横向队形-纵向队形转换示意图Fig.21 Lateral to longitudinal formation conversion of traditional master-slave three AUVs’ formation without wave interference and communication failure
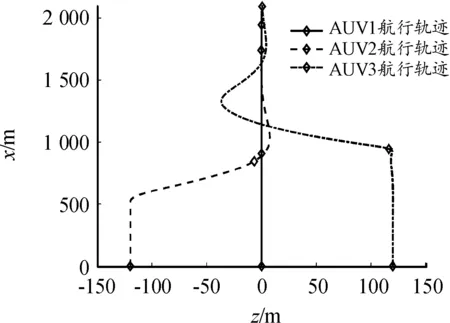
图22 无海浪干扰及通讯故障条件下弱通信非主从式 三航行器编队横向队形-纵向队形转换示意图Fig.22 Horizontal to vertical formation conversion of weak communication non master-slave three AUVs’ formation without wave interference and communication failure
为了验证本文所述弱通讯条件下非主从编队方法的特点及优势,继续进行有海浪干扰、通讯延迟且航行过程中存在通讯故障情况下航行器编队的队形转换仿真试验。该仿真设计如下:航行器编队由初始状态的三角形队形转换为横向队形并继续沿预定航线保持横向队形航行,队形转换的时刻为300 s。假设在时间为400 s时发生通讯故障,传统主从式编队中各从航行器失去来自主航行器的信号,弱通讯非主从编队中航行器2失去来自上位航行器1的信号,仿真过程中受到海浪的干扰,且考虑水声通讯延迟的影响,传统主从式编队的第i个AUV的通讯延迟为式(10),弱通讯非主从式编队的第i个AUV的通讯延迟为式(11),仿真过程不考虑导航系统的误差,仿真过程的基本信息设置见表3。3个航行器由三角形队形转换为横向队形的航行轨迹如图23、图24所示。类似的,可进行航行器编队在海浪干扰、通讯延迟以及通讯故障下由横向队形转换为纵向队形的仿真,仿真过程的基本信息设置见表3,其中,队形转换时间与通讯故障时间不变,分别为300 s和400 s,通讯的延迟时间也不变,得到其航行轨迹如图25、图26所示。从以上图中可看出,传统主从式编队在失去主航行器的通讯时,在海浪干扰下2种队形转换均无法完成,2个从航行器因为没有主航行器的引导,未能机动到期望的位置;而采用本文所述弱通讯非主从编队的3个航行器在失去航行器1的通讯时,仍完成了2种队形的转换,并能够保持新队形继续航行,航行器1因为失去通讯其只能通过自身导航继续航行,所以最后在编队中的位置略有偏差,而航行器2和3之间仍可通讯直到完成队形转换,继续航行仍旧能够保持在同一条垂直于或平行于航迹的直线上,队形保持良好。
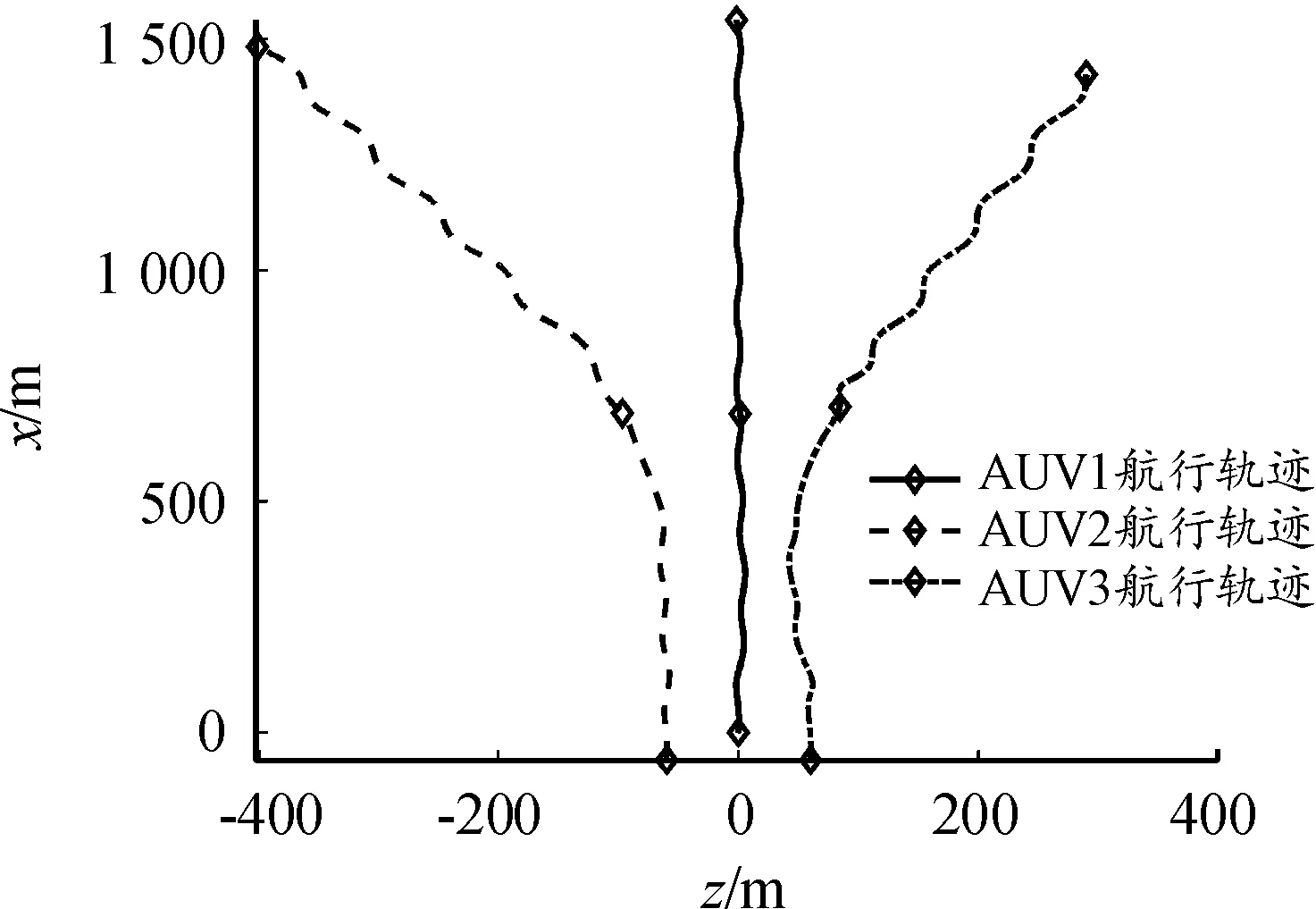
图23 海浪干扰及通讯故障条件下传统主从式 三航行器编队的三角队形-横向队形转换示意图Fig.23 Triangular formation lateral formation conversion of traditional master-slave three AUVs’ formation under wave interference and communication failure
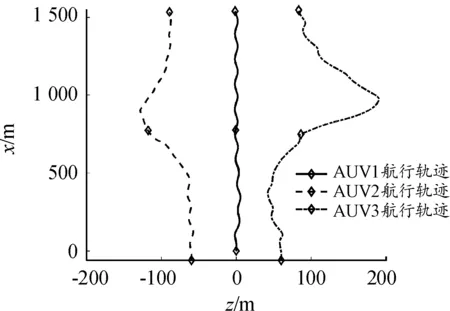
图24 海浪干扰及通讯故障条件下弱通讯非主从式 三航行器编队的三角队形-横向队形转换示意图Fig.24 Triangular formation lateral formation conversion of weak communication non master-slave three AUVs’ formation under wave interference and communication failure

图25 海浪干扰及通讯故障条件下传统主从式 三航行器编队的横向队形-纵向队形转换示意图Fig.25 Lateral to longitudinal formation conversion of traditional master-slave three AUVs’ formation under wave interference and communication failure
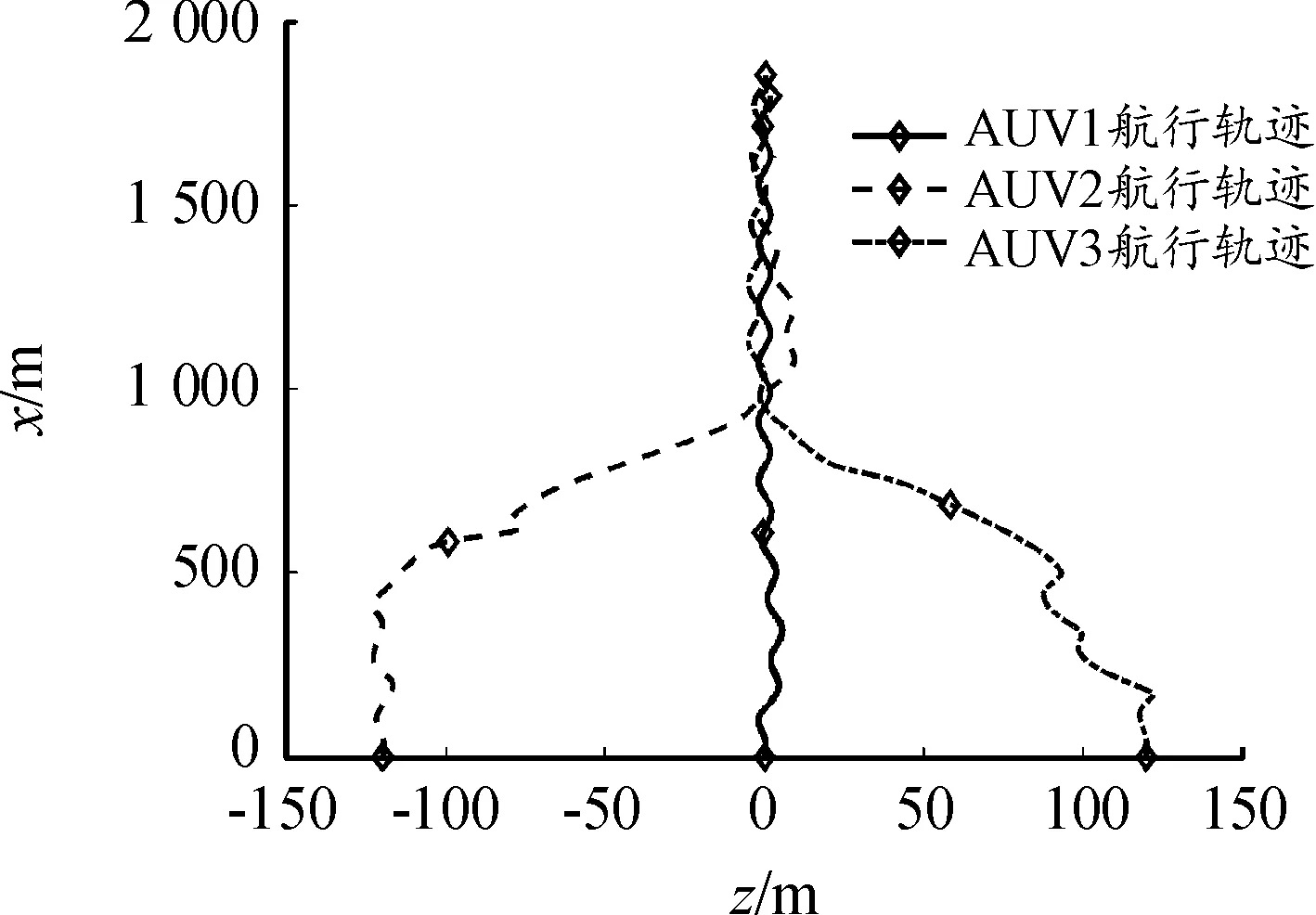
图26 海浪干扰及通讯故障条件下弱通讯非主从式 三航行器编队的横向队形-纵向队形转换示意图Fig.26 Lateral to longitudinal formation conversion of weak communication non master-slave three AUVs’ formation under wave interference and communication failure
5 结论
1) 所提出的方法能够在通讯受限、通讯存在一定延迟并且具有一定海浪干扰的条件下有效控制水下航行器编队完成各种编队行为,包括定速航行、编队转弯以及2种常见的队形转换。
2) 传统主从式编队控制方法在主航行器通讯故障并且航行器编队受到海浪干扰的情况下,不能保持期望的队形,且完不成编队转弯以及队形转换。
3) 相比传统主从式编队方法,所提出的方法具有通讯质量要求低、编队失效风险低的优点。
4) 相比传统主从式编队方法,所提出的方法在某些情况下由于参考位置信息的间接性,位于通讯链末端的航行器运动轨迹规划容易受到影响,导致走过的路径偏长,该问题有待通过算法优化改进。
