风电并网逆变器的改进型线性自抗扰控制
2022-01-09周雪松周泳良马幼捷杨路勇杨霞
周雪松,周泳良,马幼捷,杨路勇,杨霞
(天津理工大学电气电子工程学院,天津 300384)
近年来,随着风力发电规模的不断扩大,并网逆变器作为风电机组与电网相连的接口装置,对其控制策略的研究引起了越来越多的关注[1]。在风电系统中,并网逆变器不仅要实现对并网电流和系统输出功率的控制,还必须保证逆变器直流母线电压在系统允许的范围内波动[2]。其控制性能的好坏是风电系统能否稳定、高效运行的关键。
目前,并网逆变器的控制主要应用的是电压电流双闭环比例积分(proportion integration,PI)控制,其中电压外环用来提高并网逆变器直流侧母线电压的稳定性,电流内环依据电压外环输出的电流指令保证风电系统在单位功率因数下运行[3],具有控制结构简单、易于实现的优点。但是,并网逆变器是强耦合、非线性、时变和负载扰动性强的系统[4],而PI控制是基于线性化的控制且存在抗扰能力不足、易产生超调和震荡的缺点,不能满足并网逆变器要求瞬态响应快、稳态精度高、抗干扰能力强的控制需求[5]。为了使并网逆变器在风电系统中具有更好的控制性能,国内外学者对传统双闭环PI控制策略进行了改进。文献[6]在电流内环中应用前馈控制实现有功功率和无功功率之间的解耦,这种方式增加了电流内环的抗扰能力,但是比例积分环节往往需要取比较大的增益系数,这会降低风电系统的动态性能。文献[7]在并网逆变器中采用虚拟阻抗方法克服了电网实际阻抗对其控制性能的影响,提高了系统的抗干扰能力和鲁棒性,但该文献中控制结构较复杂,且控制性能易受系统内部因素的限制。
自抗扰控制技术(active disturbance rejection control,ADRC)是韩京清教授提出的一种新型控制策略,它克服了传统PID控制的缺陷,并且不依赖于系统的数学模型,它的核心是通过扩张状态观测器(extended state observer,ESO)观测出系统状态变量的同时,对系统的总扰动进行观测,进而对总扰动进行补偿,消除总扰动对系统的影响[8]。目前,ADRC已经在永磁同步电机、机器人控制等领域得到了很好的应用。同时,传统非线性ADRC也存在分析困难、参数众多等问题,鉴于此,高志强教授经过多年研究,提出了线性自抗扰控制技术(linear active disturbance rejection control,LADRC)。通过对其进行极点配置,LADRC只需调节控制器带宽、观测器带宽和控制器增益3个参数,就能达到较好的控制效果,进一步推动了自抗扰控制在工程应用中的发展。在并网逆变器控制系统中,对ADRC的研究也越来越多。文献[9]通过在线性扩张状态观测器(linear extended state observer,LESO)中引入总扰动的微分信号,提升了系统的扰动抑制能力,但是该方法对LESO进行了升阶,这将导致系统出现严重的峰值现象,不利于系统稳定。文献[10]考虑逆变器输出电压为时变信号的情况,基于LADRC控制的逆变器输出量会存在稳态跟踪误差,通过微分前馈将其补偿到LADRC中,提高逆变器的稳态性能。文献[11]通过引入并网逆变器输出电压误差的微分项,增加了LESO的观测带宽,但改进后LESO的参数增加了1倍,不利于工程应用。
本文以并网逆变器直流母线电压为控制对象,在借鉴文献[11]设计思路的基础上,提出了一种针对电压外环的改进型LADRC控制策略。通过在LESO中引入直流母线电压微分(可通过直流母线电容电流测量得到)与观测值之间的误差项,提高了LESO的观测精度。通过频域分析法,对改进型LADRC控制系统的跟踪性和抗负载电流扰动特性进行了分析,并通过代数稳定判据对改进型LADRC控制系统的稳定性进行了分析。最后,通过Matlab&Simulink数字仿真验证了改进型LADRC的优越性。
1 网侧并网逆变器数学模型
三相并网逆变器拓扑结构如图1所示。图1中,ega,egb,egc为三相电网电压;iga,igb,igc为三相电网电流;uga,ugb,ugc为逆变器侧三相输出电压;Udc为直流母线电压;Idc为直流母线电流;is为负载电流;L为等效的滤波电感;R为等效的电阻;C为直流母线电容。令Sk表示逆变器开关器件的开关状态,称为开关函数。Sk=1表示上桥臂导通,下桥臂关断;Sk=0表示上桥臂关断,下桥臂导通。
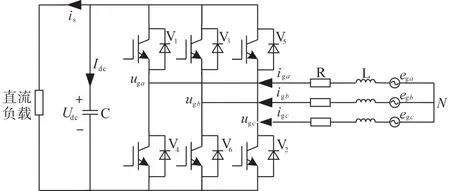
图1 风电逆变器的系统结构Fig.1 Wind power inverter system structure
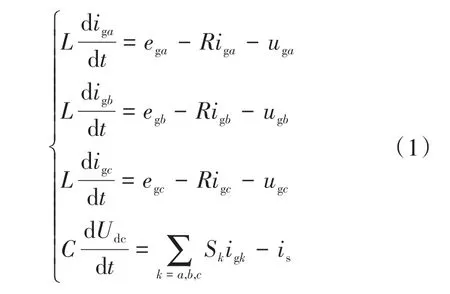
为建立并网逆变器的数学模型,作如下假设:电源为三相对称的正弦电压源;开关为理想开关,无导通、关断延时,无损耗。由此可以得到并网逆变器在三相静止坐标系下的数学模型:
将式(1)进行Park变换[12],得到并网逆变器在d-q坐标系中的数学模型:

式中:egd,egq为电网电压在d,q轴上的分量;igd,igq为电网电流在d,q轴上的分量;ugd,ugq为并网逆变器输出电压在d,q轴上的分量;Sx为开关函数在d,q轴上的分量;ω为电网角频率。
2 电压外环的LADRC控制策略
LADRC是由线性扩张状态观测器(LESO)、扰动补偿和线性状态误差反馈控制率(linear state error feedback,LSEF)三部分构成[13],如图2所示。

图2 传统LADRC结构图Fig.2 Traditional structure of LADRC
图2中,z1为输出量观测值,z2为输出量一阶导数观测值,z3为扰动量观测值,r为参考输入,y为控制输出,b0为控制器增益,u为控制量。
2.1 电压外环的传统LESO设计
为使系统在单位功率因数下运行,设置q轴无功电流为零。当控制系统采取电压矢量定向控制时,式(2)可以转变为
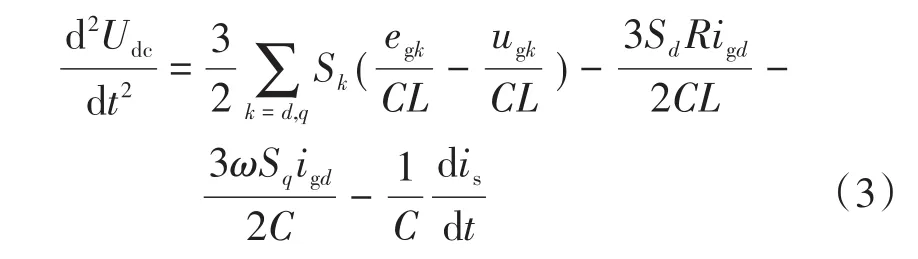
由式(3)可知,网侧并网逆变器的数学模型为二阶系统,因此设计二阶LADRC。令b0=3/(2LC),将系统(式(3))中内部参数不确定量、时变量和外部扰动记为总扰动,则

式中:w为系统受到的外部扰动。

令x1=y,x2=y˙,x3=f,可将式(5)转变为如下状态方程:

根据式(6)可以构建三阶LESO:

式中:z1,z2,z3分别为直流母线电压、直流母线电压微分和总扰动的跟踪信号;β1,β2,β3为观测器增益。
选取合适的β1,β2,β3,LESO将实现对直流母线电压、直流母线电压微分和总扰动的实时跟踪。
根据文献[14]极点配置法,可对系统(式(7))做如下的极点配置:
式中:ωo为观测器带宽。
2.2 电压外环的改进型LESO设计
在LADRC中,LESO对系统状态变量及总扰动的观测值与其实际值的观测误差是影响LADRC控制品质的重要因素,观测误差越小,LADRC的鲁棒性和抗扰能力越好。通过式(7)可以看出,在传统LESO中通过z1-x1来减小z1的观测误差,符合传统控制理论中误差反馈控制原理,但使用z1-x1减小z2和z3的观测误差并不合适。当扰动为常值扰动时,选取合适的控制器增益,z2,z3能够实现准确跟踪x2,x3,取得较好的控制效果。但是,当扰动为时变扰动时,由于LESO要先完成对x1的实时跟踪,才能完成对x2,x3的跟踪,此时z2,z3将存在动态滞后误差,对扰动也只能部分补偿,最终将产生较大的跟踪误差。
由于并网逆变器中第2个状态变量x2可由直流母线电流测量值间接获取,为了进一步提高LESO观测精度,将其视为LESO的输入,通过引入直流母线电压微分(x2)与其观测值(z2)的误差项,构造下式所示的改进型LESO结构:

式中:β1,β2,β3,β4为观测器增益。
参照文献[14]可对式(9)做如下极点配置:

在传统LESO中,由式(6)和式(7)可以得到它的观测误差的状态方程为

式中:ei为各阶观测误差。
由式(12)可知,只要ωo足够大,传统LESO的各阶观测误差就能收敛到较小值,LESO可以实现对系统状态的准确观测。但是在实际系统中,ωo过大容易使系统受到噪声的污染[15]。因此,ωo不宜取过大的值,即传统LESO会存在跟踪误差。
由式(6)和式(9)可以得到改进型LESO的观测误差的状态方程为

由式(13)可以得到稳态时改进型LESO观测误差的范围为

对比式(12)和式(14)可知,相较于传统LESO,改进型LESO对x2,x3的观测精度有很大提升。改进型LADRC对x2的观测精度提高了2.5倍,对x3的观测精度提高了1.75倍。因此,改进型LESO达到与传统LESO相同的对x2,x3的观测精度的情况下,需要的ωo比传统LESO更小,这意味着本文提出的改进型LESO效率更高,参数调节更为容易。同时,由于传统LESO的初始观测误差过大,容易使系统的初始输出产生很大的超调,即产生较大的初始微分峰值现象[16],本文提出的改进型LESO减小了对x2,x3的观测误差,从而减小了初始微分峰值现象。另外,改进型LESO对扰动的观测精度的提升,也提高了LADRC的抗扰能力。
2.3 电压外环的扰动补偿环节和LSEF设计
扰动补偿和线性误差反馈控制率设计为

式中:kp,kd为控制器参数。
此时,若忽略z3和f之间的误差,系统(式(5))可简化为积分串联型结构。LADRC相较于传统PID控制采用积分环节消除系统建模误差的方法有了更好的突破,它通过扰动补偿环节将系统建模误差进行消除,避免了积分环节的引入造成系统动态性能下降。
为了简化控制器的设计,采用带宽整定法,将带宽与控制器增益相互联系,令其中,ωc为控制器带宽。
通过以上分析,改进型LADRC控制器结构图如图3所示。

图3 改进型LADRC结构图Fig.3 Structure of improved LADRC
3 改进型LADRC系统传递函数
由式(9)和式(10)可得改进型LESO中的z1,z2,z3的传递函数为
根据式(15)和式(16),可得控制量u的传递函数为

本文中电流内环仍采用PI控制,并网逆变器的整体控制框图可以等效为图4所示的结构。

图4 逆变器控制框图Fig.4 Control block diagram of inverter
图4中,1(/Tfs+1)为采样环节,Tf为采样时间常数;Gc(is)为电流内环等效传递函数;Kc为转换环节系数。参照文献[17],电流内环的等效传递函数如下式所示:

式中:Ts为内环等效传递函数的时间常数。
由图4可以得到系统直流母线电压的传递函数如下式:

式(19)中,第1项直接反映了控制系统对直流母线电压给定值Ud*c的跟踪性能,第2项直接反
映了负载电流is的扰动性对直流母线电压稳定性的影响。
4 动态性能和稳定性分析
4.1 改进型LADRC的跟踪性和抗扰性分析
为验证本文所提方案的有效性,本节将改进型LADRC控制系统的跟踪特性、抗负载电流扰动特性与传统LADRC控制方案进行了比较。
图5为传统LADRC、改进型LADRC控制系统的闭环频率特性对比。从图5a可以看到,改进型LADRC在中低频段的带宽增加,能够更好地跟踪直流母线电压给定输入值。从图5b可以看出,改进型LADRC在中低频段的抗负载电流扰动能力优于传统LADRC控制;高频段两者曲线大致重合,改进型LADRC不会对高频增益产生影响;同时,改进型LADRC使系统的相位滞后程度减小。通过以上仿真表明,相较于传统LADRC,改进型LADRC具有更好的跟踪能力和抗扰能力。

图5 改进型LADRC与传统LADRC的频域特性对比Fig.5 Comparison of frequency characteristics between improved LADRC and traditional LADRC
4.2 改进型LADRC的稳定性分析
将RG(s),RH(s),Gci(s)代入式(19),可以将直流母线电压给定值到直流母线电压Udc的闭环传递函数化简为


由于Tf,Ts,C,Kc,b0,ωo,ωc均为正数,因此,ai>0(i=0,1,2,3,4,5)。判断系统运行是否稳定可通过李纳德-戚帕特代数稳定判据进行判定,即偶数阶或奇数阶赫尔维兹行列式为正则系统稳定。由式(20)可知:

通过对式(21)进行数值仿真可以发现,在系统控制器增益b0确定的情况下,当ωo和ωc大范围变化时,不会影响母线电压的稳定性[18]。另外,在系统控制器增益b0不确定的情况下,通过对ωo,ωc和b0的合理配置,依旧能够使母线电压具有较好的稳定裕度。
5 仿真研究
本文基于Matlab仿真软件,搭建了1.5 MW直驱永磁风电机组模型,进一步验证改进型LADRC控制策略的可行性。其中,电压外环为改进型LADRC控制,电流内环为传统PI控制。并网逆变器参数为:电网电压Ub=690 V;直流母线电压Udc=1 070 V;直流母线电容C=240 μF;网侧等效电阻R=0.942 Ω;网侧滤波电感L=120 μH;额定功率Pb=1.5 MW;额定频率fb=50 Hz。;控制器具体参数为:控制器带宽ωc=1 600;观测器带宽ωo=300;采样时间常数Tf=0.000 5 s;内环等效时间常数Ts=0.002 5 s;转换环节系数Kc=0.75。
5.1 稳态工况仿真分析
当风电系统不受外部扰动的影响时,对直流母线电压的波形进行了仿真分析,设置仿真时间为2 s。图6为传统LADRC和改进型LADRC控制策略下的直流母线电压波形的对比。从图6a可以看出,传统LADRC控制的直流母线电压在0.15 s进入稳态,改进型LADRC控制的直流母线电压在0.08 s进入稳态,改进型LADRC具有更快的调节时间。从图6b可以看出,在稳态时,直流母线电压在传统LADRC控制下和改进型LADRC控制下的稳态误差均在很小的范围内变化,两者稳态时的性能均较好。但是,改进型LADRC控制下的直流母线电压的最大稳态误差相比传统LADRC减小了0.001 4(标幺值),改进型LADRC的稳态控制精度有了一定的提升。另外,从图6a可以看出,在暂态时,传统LADRC控制策略下的直流母线电压的超调幅值为0.31(标幺值),改进型LADRC控制策略下直流母线电压的超调幅值为0.15(标幺值),相较于传统LADRC,改进型LADRC控制策略下直流母线电压波形的超调幅度减小了0.16(标幺值),因此,系统的初始微分峰值现象有了很大程度的减小。

图6 稳态工况下母线电压控制效果对比Fig.6 Comparison of bus voltage control effect under steady state condition
5.2 抗扰能力仿真分析
图7为电网电压发生跌落故障时电网电压波形及直流母线电压波形。设置在2.1 s时发生电压跌落故障,跌落幅度为50%,持续0.4 s后恢复正常。

图7 电压跌落工况下控制效果对比Fig.7 Comparison of control effects under voltage drop conditions
从图7b中可以看出,在发生故障时,直流母线电压在传统LADRC和改进型LADRC控制策略下的超调幅值分别为0.032(标幺值),0.011(标幺值),恢复时间分别为200 ms,30 ms;在电网电压恢复至额定值时,母线电压在两种控制策略下的跌落幅值分别为0.035(标幺值),0.013(标幺值),恢复时间分别为165 ms,28 ms。
图8为电机加载、减载时并网逆变器的直流母线电压波形。图8a对应电机负载由20%突增到80%时直流母线电压的变化情况,在传统LADRC和改进型LADRC控制策略下的直流母线电压升高幅度分别为0.017(标幺值),0.007(标幺值),母线电压恢复至额定值的时间分别为110 ms,40 ms。图8b对应电机负载由80%突减到20%时直流母线电压的变化情况,在两种策略下母线电压跌落幅度分别为0.016(标幺值),0.006(标幺值),恢复时间分别为88 ms,30 ms。

图8 电机加载、减载工况下母线电压控制效果对比Fig.8 Comparison of bus voltage control effects under motor loading and deloading conditions
通过电网电压跌落和电机加载、减载的数字仿真结果表明,在相同的工况下,改进型LADRC相较传统LADRC,降低了直流母线电压的波动峰值和过渡过程时间,具有更好的抗扰特性。
6 结论
本文针对并网逆变器控制策略中传统双闭环控制抗扰能力不足的问题,提出一种应用于电压外环的改进型LADRC控制策略。通过在LESO中引入直流母线电压微分与观测值之间的误差项,提高了LESO的观测精度。研究结论如下:
1)与传统LADRC相比,改进型LADRC减小了LESO对直流母线电压微分和总扰动的观测误差,提高了系统的跟踪能力和抗扰能力,并改善了系统的初始微分峰值现象;
2)仿真结果表明,本文所提的控制策略既可实现直流母线电压在稳态和暂态工况下的快速调节,同时还提高了并网逆变器直流母线电压抵抗电网电压突变和负载扰动的能力。
