考虑外锁闭装置影响的高速道岔尖轨转换力仿真研究
2022-01-07方嘉晟徐井芒
陈 嵘,方嘉晟,王 平,于 浩,徐井芒
(1.西南交通大学 高速铁路线路工程教育部重点实验室,四川 成都 610031;2.西南交通大学 土木工程学院,四川 成都 610031)
当道岔转换工况不良时,极有可能出现尖轨转换力超限的问题,从而导致尖轨无法转换到位或是产生了较大的不足位移,对行车安全造成了极为不利的影响。为严格控制尖轨转换力大小不超过转辙机额定功率,合理的尖轨转换方案设计十分必要。对于道岔转换的控制研究,国内外专家学者已经做了大量工作,沈长耀等[1]提出了一种计算弹性可弯尖轨扳动力的简易计算方法。Cedomir[2-3]首次应用有限元方法分别建立了尖轨与可动心轨转换力计算模型,将尖轨与可动心轨分解为多段等截面梁,对各段梁施加不同约束分别进行转换力计算。Wang等[4]建立了30#高速道岔转换有限元模型,研究分析了滑床台摩擦系数、扣件横向刚度等因素对转换力及不足位移的影响。文献[5-6]考虑道岔的变截面特性,首次系统地建立了高速道岔尖轨与心轨转换计算理论体系,并探究了不同牵引点布置方式下转换力与不足位移的变化规律。徐井芒等[7]建立了18#高速道岔转辙器外锁闭装置有限元模型,对转换锁闭结构的力学特性进行了相应研究。李斌[8]以42#道岔尖轨转换为例,分析了多机多点牵引方式下道岔转换同步性的影响因素,并提出了解决办法。Camci等[9]利用传感器采集了道岔转换过程中力与电流的实时数据,结合数字信号处理技术提出了道岔转换故障预测方法。Dutta等[10]通过联合仿真在道岔转辙器区引入了一种闭环控制器,基于自适应校正算法实现了道岔转换过程中不足位移的自动调整。上述成果对道岔转换控制及方案设计的深入研究起到了至关重要的作用,但以往研究中所有关于转换力的计算仅分析了道岔尖轨或心轨克服横向阻力作用时所需的转换力大小,未考虑转换锁闭装置运动对道岔转换力的影响,并且计算结果均是针对转换最终时刻,鲜有人关注转换过程中道岔转换力的变化规律,因此本文研究对提高道岔转换力计算精度以及道岔转换方案优化设计有着重要意义。
本文以18#高速道岔尖轨转换为例,基于有限元方法建立了弹性可弯尖轨转换分析模型,细化分解尖轨转换动作,探究了尖轨转换力随转换时间的变化规律,并通过分析尖轨外锁闭装置运动与受力情况,揭示了外锁闭装置对尖轨转换力的影响机理,较准确地模拟出了各牵引点锁闭杆处的实际转换力时程曲线,为高速道岔尖轨转换过程分析与道岔转换同步性研究提供了理论支撑。
1 尖轨转换分析模型
转换力计算是道岔转换设计的基础,以往的传统模型将道岔转换视作尖轨或心轨克服横向阻力运动的过程,其计算所得结果实际为轨腰处作用力,而未考虑外锁闭装置解锁或锁闭阶段各部件发生相对运动时对锁闭杆处实际转换力的影响。本文中尖轨转换分析模型由尖轨扳动力计算模型与外锁闭装置模型两部分组成。基于尖轨扳动模型模拟了尖轨完整运动过程,计算得到尖轨轨腰处作用力时程曲线。同时结合外锁闭装置模型对转换锁闭结构中各部件的运动与受力情况进行了分析,并拟合得到了尖轨轨腰处作用力与锁闭杆处实际转换力的传递函数。
1.1 尖轨扳动有限元模型
尖轨转换过程中需克服反映于道岔牵引点的一切阻力,通常认为道岔转换阻力为
F=Fm+Ft+Fq
(1)
式中:F为道岔转换阻力;Fm为可动部件滑动摩擦力;Ft为可动部件反弹力;Fq为其他阻力。
根据高速道岔转辙器区结构,结合18#道岔尖轨转换特点,建立了弹性可弯尖轨扳动有限元模型。分析尖轨与基本轨的相对位置和尖轨跟端的约束条件即可确定尖轨转换的位移边界条件,尖基轨密贴力、牵引点转换力及滑床板摩擦力确立了力的边界条件。尖轨转换原理示意见图1,该模型中尖轨尖端,顶铁,间隔铁,扣件、岔枕及牵引点位置均对应单元节点,通过控制尖轨及基本轨节点坐标来模拟尖轨、基本轨线形,图1中i表示各变量的序号。采用文献[12]中的相关计算假定,将尖轨视作截面线性变化的欧拉梁,仅在水平面内发生横向变形,并用二维梁单元(Beam3)模拟尖轨、基本轨;模型中扣件起横向阻力作用,采用非线性弹簧单元(Combin39)模拟;跟端间隔铁用非线性弹簧单元(Combin39)模拟;尖轨与基本轨或顶铁未接触时,相互之间没有作用力,当尖轨与基本轨密贴或接触顶铁时,受到较大的密贴力与顶铁力,尖轨密贴力与顶铁反力作用可通过修改非线性弹簧单元(Combin39)参数实现变化。
为模拟尖轨转换过程中尖轨的运动状态并得到尖轨轨腰作用力时程曲线,引入牵引点启动时间,转换速度,外锁解锁时间等参数,以控制尖轨转换动作,通过在模型中对各牵引节点施加任意时刻下的尖轨位移,结合有限元软件进行求解可得牵引节点对应支反力,此结果即为不同时刻状态下尖轨轨腰作用力。
1.2 尖轨外锁闭装置工作原理
18#道岔尖轨转换方式为三机三点牵引,不同牵引点处外锁闭装置结构基本相同,由于篇幅限制本节仅以第一牵引点为例对模型进行说明。尖轨外锁闭装置由尖轨连接铁、锁闭框、锁闭钩、锁闭杆组成,见图2,图2中Fgy表示尖轨轨腰作用力,Fsbg表示锁闭杆实际转换力。转换设备的锁闭框安装于基本轨处,通过连接铁将尖轨与锁钩相连接,转换过程中锁闭杆发生横向运动并牵引尖轨完成转换与锁闭动作[13]。
图2 尖轨外锁闭装置结构
将尖轨转换过程分解为解锁—转换—锁闭三个阶段,外锁闭装置中的锁钩、锁闭杆和尖轨连接铁视作整体结构。当锁钩与锁闭框发生接触时,即解锁阶段与锁闭阶段,此时该整体结构中存在三部分外力,分别为尖轨传递的荷载,锁闭框传递的荷载,以及作用在锁闭杆位置的支反力;当锁钩脱离锁闭框位置,即与锁闭框相互分离时,为尖轨转换阶段,此时整体结构只需考虑尖轨传递的荷载以及作用于锁闭杆处的支反力。尖轨转换过程中,在外力作用下该整体结构处于平衡状态,根据力的平衡关系可知,在转换阶段轨腰处作用力与锁闭杆作用力相等,因此外锁闭装置运动对转换力的影响主要体现在解锁阶段及锁闭阶段。
1.3 外锁闭装置运动对转换力的影响规律
尖轨扳动有限元模型中计算得到的是轨腰处作用力Fgy,而决定转辙机功率大小的应为锁闭杆处实际转换力Fsbg,在转换过程中外锁闭装置各部件发生了相对运动,其受力环境也不断发生变化,因此需分别针对不同转换时刻探究外锁闭装置各部件中力的相互作用关系。
假定尖轨轨腰处作用力Fgy与锁闭杆作用力Fsbg应存在一定的传递函数关系为
Fsbg=f(Fgy)
(2)
以关键部件接触点及其接触面积保持不变为原则简化外锁闭装置结构,基于有限元法建立外锁闭装置模型以分析其动作过程及受力状态。为了更精确地模拟实际服役条件下道岔转换结构的受力状态,分别对模型中关键节点设置相应约束条件:对锁闭杆以及尖轨连接铁施加竖向约束;由于锁闭框为固定状态,对其施加全约束;分别在锁钩和锁闭框之间、锁钩和尖轨连接铁之间、锁钩和锁闭杆之间创建接触区域。
根据上述原理建立了尖轨外锁闭装置模型,见图3。其中尖轨连接铁、锁钩、锁闭框和锁闭杆等构件的材料参数均参照钢,具体数据见表1。
图3 尖轨外锁闭装置有限元模型

表1 钢材料参数表
对尖轨轨腰节点施加初始横向作用力,根据所建模型即可计算得到锁闭杆处相应的支反力,以此求解出锁闭杆处转换力与尖轨轨腰处作用力之间的传递函数,根据该结果可分析得到外锁闭装置运动对转换力的影响规律。对转辙器区三个牵引点分别进行建模计算,得到结果见图4、图5。
图4 解锁阶段计算结果
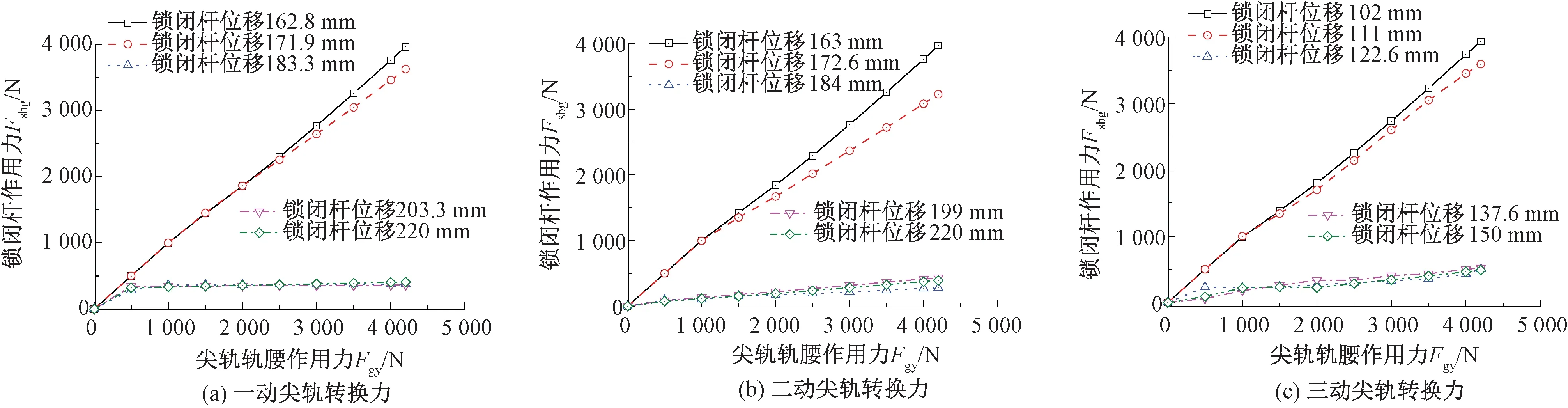
图5 锁闭阶段计算结果
由图4和图5可知,在解锁阶段时,外锁闭装置的牵引作用使得尖轨与基本轨分离,同时锁钩与锁闭杆上的凸台发生相对滑动,直至锁钩脱离锁闭框。在该阶段锁闭杆运动过程中其受力状态基本保持不变,因此不同锁闭杆位移下的锁闭杆转换力与尖轨轨腰作用力映射关系差别较小;锁闭阶段时,锁闭装置牵引尖轨向基本轨贴近,随着锁闭杆持续动作,转换位移逐渐增大,锁闭凸台将从锁钩的解锁凹槽中脱出,在该过程中锁钩燕尾部沿锁闭铁的斜面向上抬升。在锁闭阶段锁钩与锁闭杆之间接触的位置不断发生变化,导致锁闭杆的支反力会逐渐变大。锁闭杆处转换力远小于尖轨轨腰处作用力,可见外锁闭装置优化了锁闭杆的受力环境,从一定程度上延长了转换设备的服役寿命。
由计算结果可知,锁闭杆位移相同时,尖轨轨腰作用力与锁闭杆处转换力可近似成线性关系。结合最小二乘法拟合计算结果,即可得到尖轨转换不同阶段下,尖轨轨腰作用力与锁闭杆处转换力之间的传递函数。
对于解锁阶段,三个牵引点计算结果最终拟合分别为
(3)
Fsbg=0.10Fgy
(4)
Fsbg=0.12Fgy
(5)
根据锁闭阶段的计算结果可以看出,随着锁闭杆位移增大,锁闭杆转换力与尖轨轨腰作用力之间的线性函数斜率不断增大,因此可以先建立锁闭杆位移与传递函数斜率之间的映射关系。最终得到三个牵引点锁闭阶段的传递函数拟合结果分别为
(6)
(7)
(8)
式中:x为锁闭杆的位移;k为尖轨作用力与锁闭杆作用力函数关系的比例系数。
2 模型验证
2.1 计算参数
对于18#高速道岔,转辙器区尖轨总长22.041 m,弹性可弯段长度3.4 m,是半径为1 100 m的相离曲线线形,定位状态与反位状态下尖轨密贴段长度均为10.4 m,尖轨跟端类型为弹性可弯,滑床台摩擦系数取0.25,转换方式为三点牵引,各牵引点转换过程控制参数见表2。

表2 转换过程控制参数
2.2 计算结果验证
为验证所建尖轨转换模型的正确性,通过现场试验测得18#道岔转换力的相关数据。不考虑夹异物以及安装时产生的动程偏差影响,尖轨先由反位状态扳动至定位状态,再由定位状态重新转换至反位状态,重复10次上述过程以避免试验结果的偶然性。由于每次试验结果其转换力规律性及数值大小均基本一致,此处仅取其中某次的试验数据进行分析,以相同条件建立尖轨转换模型并设置相应参数计算尖轨转换力,与试验数据进行对比,结果见图6、图7。
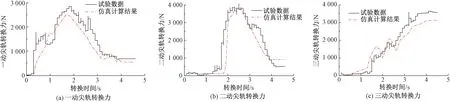
图6 反位至定位尖轨转换力
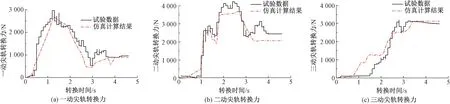
图7 定位至反位尖轨转换力
通过图6、图7对比仿真计算结果与试验数据可知,通过仿真模型计算所得尖轨转换力时程曲线与现场实测数据在规律性上基本一致,较好地模拟出了转换力随时间的变化规律。以定位扳动至反位工况为例对转换力时程曲线进行定性分析,对于第一牵引点,该处尖轨最先运动,同时转换力呈逐渐上升趋势,而在第二牵引点尖轨开始运动后,此时一、二牵引点间尖轨同步动作,一动转换力减小,而二动转换力由于尖轨位移增加逐渐增大,同理在第三牵引点尖轨开始运动时,二动转换力呈下降趋势,但由于第二牵引点转换速度大于第三牵引点,因此第二、三牵引点间尖轨线型发生一定变化导致二动转换力再次增大,第三牵引点由于尖轨位移逐渐增加转换力呈增大趋势。仿真得到的转换力与试验结果相比规律基本一致但数值仍存在一定偏差,这是由于现场条件极为复杂,道岔实际转换过程中存在着较多阻力因素,在仿真模型中未能完全考虑,因此计算结果相比实测数据略有偏差。
由仿真模型计算结果可见其转换力变化规律与现场实测转换力基本相符,因此本文所建尖轨转换模型具有一定的可信度,基于该模型所开展的理论探究是合理可信的,同时可为现场道岔转换方案优化设计提供理论指导。
3 转换力影响因素分析
3.1 夹异物对转换力影响
尖轨在完成转换动作后,需借助外锁闭装置进行锁闭,以确保尖基轨密贴。若在此过程中两牵引点之间或尖轨牵引点位置存在夹异物,由于其刚度通常较大,会导致道岔难以锁闭到位,尖轨不密贴致使过车时轮轨冲击作用加剧,增大脱轨系数,对行车安全产生极为不利的影响[14-15]。为探究夹异物存在于道岔转辙器区任意位置时对尖轨转换力的影响规律,在模型中各根岔枕节点处逐一设置不同尺寸夹异物,对相应的尖轨节点施加约束以模拟夹异物作用。根据18#高速道岔设计图,选取尖轨尖端至扣件前一根岔枕(4#~34#)逐枕设置夹异物,见图8。夹异物尺寸取0~5 mm,变化步长取1 mm,计算结果见图9、图10。

图8 18#道岔转辙器岔枕布置

图9 定位至反位尖轨转换力
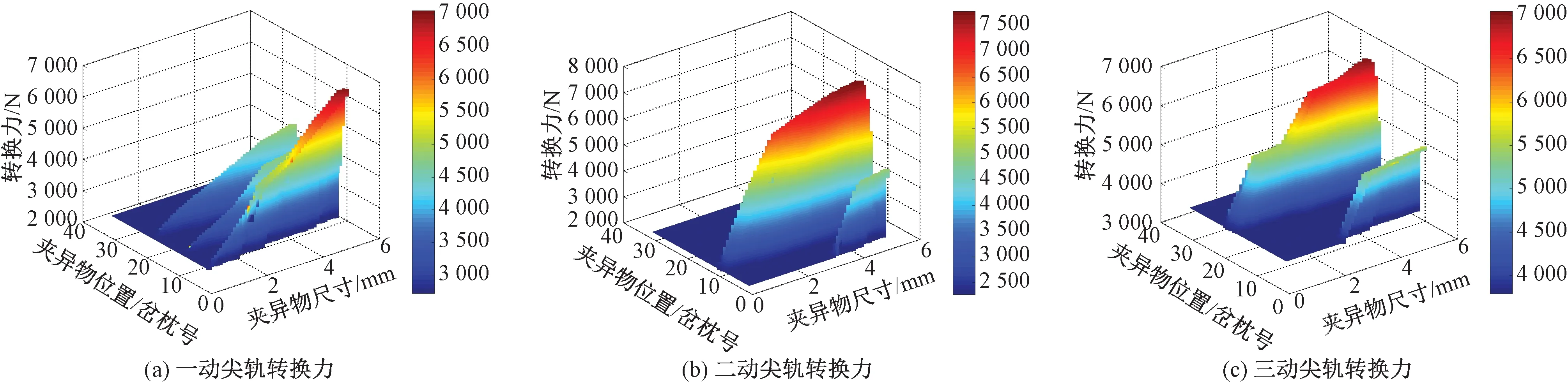
图10 反位至定位尖轨转换力
由图9、图10可知,存在夹异物时,尖轨完成转换所需的力明显增大,对各牵引点的转换与锁闭造成极大阻碍。当夹异物接近某牵引点时,由于夹异物刚度较大,会使尖轨发生一定程度的挠曲,不利于尖基轨密贴,同时夹异物的存在对尖轨运动产生阻碍作用,会造成该牵引点处的转换力明显增大,并且由于夹异物尺寸相对于尖轨长度而言很小,其产生挠曲的范围较小,因此对相距较远的牵引点影响可以忽略。尖轨转换力大小与夹异物尺寸呈正比关系,较大尺寸的夹异物会造成此处牵引点转换力显著增大。以转辙器第二牵引点反位至定位转换工况即图10(b)为例,当夹异物尺寸为5 mm时,尖轨转换力已接近7 kN。当夹异物尺寸达到 3 mm时各牵引点转换力均有一个较为明显的突变,可将此视作临界值,应在道岔转换设备运营维护过程中注意排查。
3.2 错峰启动时间差对转换力影响
作为道岔转换力的影响因素之一,尖轨转换的同步性是道岔转换过程中尖轨运动状态的直观反映,其宏观表现为尖轨各牵引点协调动作,若不同牵引点启动时间差过大,则会导致转换过程难以同步,尖轨动作不协调,同时会对转换设备的服役状态产生不利影响。为探究错峰启动时间差对尖轨转换力的影响规律,本节以斥离尖轨同步到位作为标准工况,分别计算尖轨各牵引点错峰启动0.1~1.0 s时的最大尖轨转换力,错峰时间步长取0.1 s,计算结果见图11、图12。

图11 定位至反位尖轨转换力
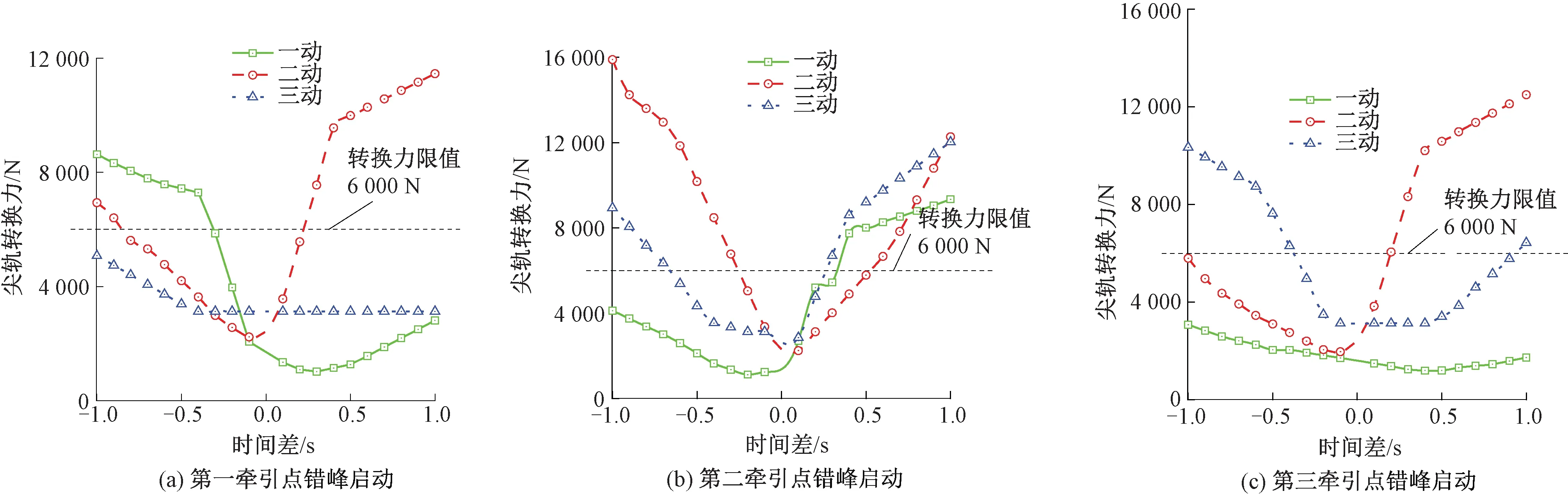
图12 反位至定位尖轨转换力
图11、图12中坐标负轴表示该牵引点先启动,正轴表示该牵引点后启动,由图11、图12可知,牵引点错峰启动时间差对尖轨转换力影响很大,当各牵引点动作时间差为零,此时不同牵引点尖轨运动状态基本一致,道岔转换同步性得到较好的控制,因此三个牵引点转换力之和最小,即转辙机总功率最小。当某一牵引点先于其他牵引点开始动作时,随着启动时间差的增大,该牵引点对应位置尖轨与其余牵引点存在较为明显的动作差,产生相互牵制作用,导致转换力增幅明显高于其他牵引点,并更易超出限值。任一牵引点较晚启动时,二动转换力都会有不同程度的增大,随动作时间差增大其幅值变化明显。这是由于不同牵引点间存在动作时间差时,在锁闭杆牵引作用下尖轨线形变化不均匀,导致转换力增大。不同工况中尤以第二牵引点先启动对道岔转换最为不利,在启动时间差为0.2 s时二动转换力已超出限值。三个牵引点尖轨同时到位工况下,各牵引点转换力分布合理,尖轨运动姿态较为均衡,因此在高速道岔转换方案设计中,应优先考虑各牵引点转换动作的同步性。
4 结论
本文基于有限元方法首次建立了可分析完整道岔转换过程的18#高速道岔弹性可弯尖轨转换分析模型,在考虑外锁闭装置运动影响的基础上计算分析了尖轨转换力随转换时间的变化规律,并结合试验数据对所建模型进行了验证,同时探究了夹异物与牵引点错峰启动时间差对尖轨转换力的影响,得出相关结论如下:
(1)尖轨转换过程中外锁闭装置各部件发生相对运动,在解锁阶段与锁闭阶段对转换力的影响尤为明显,锁闭杆处转换力远小于尖轨轨腰作用力,外锁闭装置优化了锁闭杆的受力状态。
(2)夹异物的存在不利于道岔的转换与锁闭,夹异物距牵引点越近则对该处转换力影响越大,且转换力与夹异物尺寸成正比,在夹异物尺寸为3 mm时,各牵引点转换力均会产生一个明显增幅。
(3)尖轨转换力随各牵引点动作时间差的增大整体呈上升趋势,较大的动作时间差不利于尖轨的线形控制,其中第二牵引点所受影响最为明显,第二牵引点先启动工况下,动作时间差为0.2 s时二动转换力已超过限值。