考虑机械阻尼结构的永磁悬浮系统动态特性研究
2022-01-07贾利民张振利刘洋洋
高 涛,杨 杰,贾利民,2,张振利,刘洋洋
(1.江西理工大学 永磁磁浮技术与轨道交通研究院,江西 赣州 341000;2.北京交通大学 轨道交通控制与安全国家重点实验室, 北京 100044;3.郑州西亚斯学院 未来信息技术学院,河南 郑州 451100)
随着我国城市化进程的稳步推进,磁悬浮、地铁和轻轨等公共交通体系将成为大众出行的首选方案。钕铁硼磁材性能的突破[1]与现代生产制造工艺的不断革新,有效推动了永磁材料在磁悬浮领域的应用与推广,也催生了一代永磁磁浮轨道交通制式的问世。例如中华系列轻型吊轨磁悬浮列车[2],以色列Sky Tran 系统[3-4],意大利Urban Maglev system[5]以及红轨系统[6-7],填补了磁悬浮技术在空轨领域应用的空白,开拓了磁悬浮技术的发展新方向与应用场景。
磁浮列车的悬浮架属于典型的多自由度、多模态、复杂被控系统,而传统模块化的独立悬浮结构并不能消除多个悬浮模块之间的相互耦合,而悬浮架近似刚体的固有特性、车辆扰动、外界不定扰动等因素构成的多源耦合特征,也要求车辆解耦控制策略具备较强的抗扰动与解耦性。目前,解耦控制主要围绕机械结构的被动解耦与电气主动控制两种技术路线进行。前者稳定可靠,但结构复杂;后者往往通过被控对象的状态反馈构造解耦控制器,而后由补偿信号对耦合扰动进行缓解与消除操作。文献[8]提出了转向架存在内自由度的概念,在转向架正向运动学方程的基础之上,推导出了运动学逆解的解析公式。文献[9]借鉴了M3磁浮列车和HSST磁浮车辆的转向架结构,设计出兼备完全解耦、结构简单、易控制等优势的悬浮架走行机构,对中小型永磁悬浮制式具有借鉴意义。文献[10]比较分析了弹性解耦和几何解耦方式对悬浮架防滚和解耦功能的影响,验证了吊杆型防滚解耦机构应采用半弹性解耦的方式。
文献[11-12]研究了两点式悬浮模块的反馈线性化模型,在电气控制解耦网络系统,实现了模块运动解耦;针对磁悬浮列车模块中MIMO耦合系统的耦合特性,设计了一种非线性解耦控制器。文献[13]提出了一种具有三自由度的MIMO磁悬浮运输系统的悬浮控制方法。文献[14]通过使用微分几何理论将悬浮系统进行解耦,并将极点位移法应用于解耦线性化系统,实现了双点悬浮搭接结构的冗余功能。
同时,其他相关领域的解耦策略也为磁悬浮解耦研究提供了一定的借鉴意义。文献[15]在具备多输入多输出的Quadrotor非线性系统中,通过四旋翼系统的反馈信号搭构非线性PD控制器,利用旋转倾角信号控制X轴与Y轴的动力学运动,实现了系统在侧倾、俯仰和偏航角多角度的耦合控制。文献[16]针对多自由度磁悬浮球形磁阻主动关节结构,利用逆系统模型作为解耦控制器对原型系统进行解耦控制,得到解耦后的伪线性系统,并对伪线性系统进行状态反馈闭环控制。文献[17]研究了重型卡车纵向停驶巡航系统的非线性干扰解耦控制的建模与设计。
目前,“红轨”转向架沿用了传统中小型悬浮架的刚性结构,有效降低了车辆控制难度,但依然面临多重耦合关系和复杂环境下的多自由度姿态调整等问题;同时,基于Halbach永磁斥力的悬浮结构具备非线性、不稳定、鲁棒性弱等不足,进一步提高了转向架的结构设计和控制难度。为此,本文围绕弹簧作用下永磁悬浮结构的被控状态响应特性展开研究,旨在揭示车载弹性元件对永磁悬浮结构的影响规律。
1 系统动力学模型
文献[6]的研究表明,Halbach阵列为欠缺阻尼项,在静态环境下极易引起自激振荡现象。而减振阻尼器(如:橡胶空气弹簧垫、金属橡胶阻尼件)是否能够发挥悬浮振动抑制作用,能否实现车辆减振效果等问题,值得进一步推敲与论证。结合现有永磁悬浮模块的研究基础,本文将弹簧阻尼部件的弹性扰动因素考虑到车辆被控模型中,在车辆负载与悬浮块之间引入弹性阻尼器,简化结构见图1。

图1 具备单自由度阻尼挂件的永磁悬浮模块
在建模过程中,将弹簧近似为线性力学特性,仅考虑垂向单自由度的动力学特征,且不考虑车辆具备的其他不稳定扰动因素。设弹簧的两端负载和悬浮块的质量分别为m1和m2,Z为负载变量,δ为悬浮间隙,K为弹簧的弹性系数,δ*为未加载弹簧的永磁悬浮间隙,N*为弹簧伸缩弹力。
1.1 永磁阻尼系统的动力学模型
由牛顿动力学理论,建立运动学方程。
运动学方程
( 1 )
相应的变量关系为
( 2 )
式中:参数Z/δ的变化可理解为负载和车载悬浮块相对轨道的变化量;x、x0分别为自由状态、稳定状态下的弹簧伸缩变量;F(δ)为静磁场悬浮力。
在永磁悬浮模块中,静磁场悬浮力[6]可以表示为
F(δ)=aebδ+c
( 3 )
式中:a、b、c均为常系数。
被控系统的平衡边界条件为
( 4 )
式中:N0=Kx0。
将式( 3 )在平衡点δ0处泰勒公式线性化展开,可得
( 5 )
式中:f0和Δf分别为平衡点处静态悬浮力和临界条件下的悬浮变量;kδ为悬浮间隙增益。

( 6 )
式中:系数矩阵为
( 7 )
考虑永磁系统不具备可控性(此刻B为空矩阵),由式(7)直接取得系统特征方程为
( 8 )
式中:s为复变量。
由特征方程可知,机械弹簧部件增加了永磁悬浮系统的复杂性,受弹簧弹性形变的影响,由原二阶系统[3]演变为四阶系统,且不具备可控性。
依据式( 8 )特征方程,将弹性系数K为变量绘制广义可变参数根轨迹,其中开环传递函数可演化为
( 9 )
由式( 9 )可以得对应的广义根轨迹,见图2。
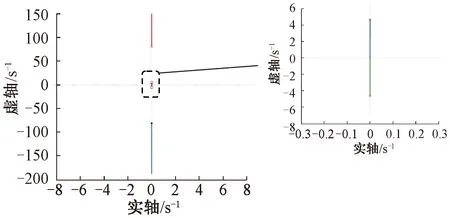
图2 关于参数K的广义根轨迹
由广义根轨迹可知,弹簧并未改善永磁悬浮结构的稳定状态,表现出零阻尼的动态特性。随着参数K的变化,系统动态特性区间围绕虚轴变化,且落在4个区间内。相比原系统,增加了系统的动态解析域,使得被控系统更加复杂化。在文章仿真结果中所涉及的参数定义见表1,Hc为永磁体矫顽力。

表1 相关参数
1.2 永磁悬浮动态响应
为了研究系统在初始扰动下的响应波动,本文在Simulink环境下,选取三组参数K样本数据分别取K=300、700、1 000 N/m,车载悬浮块的初始状态设定为20 mm,结果见图3。

图3 不同K下原系统与加载弹簧阻尼器的系统响应曲线
由图3可知,δ曲线的振动幅值小于δ*,这也意味着弹簧对原系统的振动存在一定的抑制作用,且受弹力影响,δ输出振动频率存在延时现象(响应右移);当弹性系数K增大时,弹性阻尼趋向于刚性状态,δ曲线延时效应呈逐步消失趋势。综合三种状态的对比,表明弹簧的引入有益于增强系统悬浮的稳定性,但系统响应受弹性参数影响较大。
进一步地,在图3的基础上,系统在5 s时刻依次给予0.5倍初始状态的扰动信号,持续1 s,且作用于永磁悬浮块(以下扰动方向设定均为垂直向下),系统响应曲线见图4。

图4 预设扰动状态下的系统响应曲线
在预定扰动下,系统响应曲线基本与图3的波动规律保持一致,受扰动影响系统振动幅值急剧增加,且不具备恢复能力;值得注意的是,当扰动加载后,永磁悬浮模块的悬浮幅值δ*超过了负载响应Z,这也进一步证实了具备弹簧的悬浮模块发挥了振动抑制作用,为未来永磁悬浮结构实现多点悬浮控制及车辆抗振提供了参考意义。
2 永磁电磁混合悬浮系统
针对永磁悬浮结构具备的零阻尼特性,本文结合常导电磁悬浮技术的成熟、可控等优势,通过引入电磁悬浮模块与永磁悬浮模块构成并联混合悬浮结构。在并联式混合悬浮结构采用Halbach阵列与电磁悬浮结构的非对中结构,水平分量Fy用于导向;垂向分量Fz用于振动抑制和补偿直线牵引电机的法向力,综合发挥电磁悬浮结构的悬浮辅助与导向控制作用,特别是缓解车厢扰动对车载导向的横向压力,简化结构见图5。h1、h2分别表示电磁绕组结构与永磁悬浮模块的横向、纵向偏离距离。

图5 单磁极混合悬浮模块的力学分析以及车载转向架示意
2.1 混合悬浮动力学模型
结合1.1节对永磁悬浮模块的模型分析,在不考虑永磁电磁混合悬浮结构的磁场耦合前提下,混合悬浮结构对负载的磁力[11]可以描述为
(10)
电磁悬浮模块的电压电流方程[18]可以简化为
(11)
式中:F(i)为电磁悬浮磁力;L(i,δ)和R分别为电磁悬浮系统的电感和电阻;S、N分别为电磁悬浮系统中的磁场截面、线圈匝数;u0为真空磁导率。
由式(10)和式( 5 )可知,悬浮力与电流、间隙呈现二元非线性关系,在平衡点(i0,δ0*)处进行线性化,泰勒公式展开为
(12)

结合式( 1 )~式( 5 )的动力学分析,可得加载弹簧的混合悬浮系统的线性化模型为
(13)
式中:系数矩阵为
(14)
通过式(13)与式(14),可得混合悬浮系统的开环传递函数为

(15)
式中:T=Km2+kδ*m2+Km1
式(15)表明了混合悬浮系统结合弹簧阻尼结构将原系统进一步复杂化,由四阶演变为五阶系统,改变了原系统的稳定域。
该系统的可控性为

(16)
其秩为5,满秩,系统具备完全可控性。
该系统的可观性为

(17)
其秩为5,满秩,系统具备完全可观测性。
2.2 系统控制设计与仿真分析
在前文的论述中,加载弹簧的永磁悬浮结构依然保持着欠稳定特性,本文期望附加并联式电磁悬浮结构进行系统可控性调整。另一方面,永磁电磁构成的混合悬浮结构具备可控可观测性。为此,结合串级控制方案[19]对车辆悬浮姿态加以主动控制,采用电流环和间隙环的双环控制手段加快控制电流对电压的跟踪速度,提高了系统的抗扰动能力,系统双环控制框图见图6。
在框图中,Ds为附加外部扰动力,x0为系统平衡位置。在反馈控制中,系统位置环采用PD控制器,电流环选用比例控制器。
(18)
通过附加K2的比例增益进行反馈信号的调节。
G(s)=K2[Gi(s)+Gδ(s)]
(19)
式中:KI、Kp、Kd分别为电流反馈增益、位置环的位置增益和速度增益。
考虑到混合系统依然属于单输入单输出(SISO)系统[20],那么在图6的基础上,将整体系统划分为控制模块、调控模块与被控混合模块,见图7。

图6 闭环控制系统结构框图
根据图7结构,利用Mason增益公式[20],可以获得对应闭环系统的特征方程为
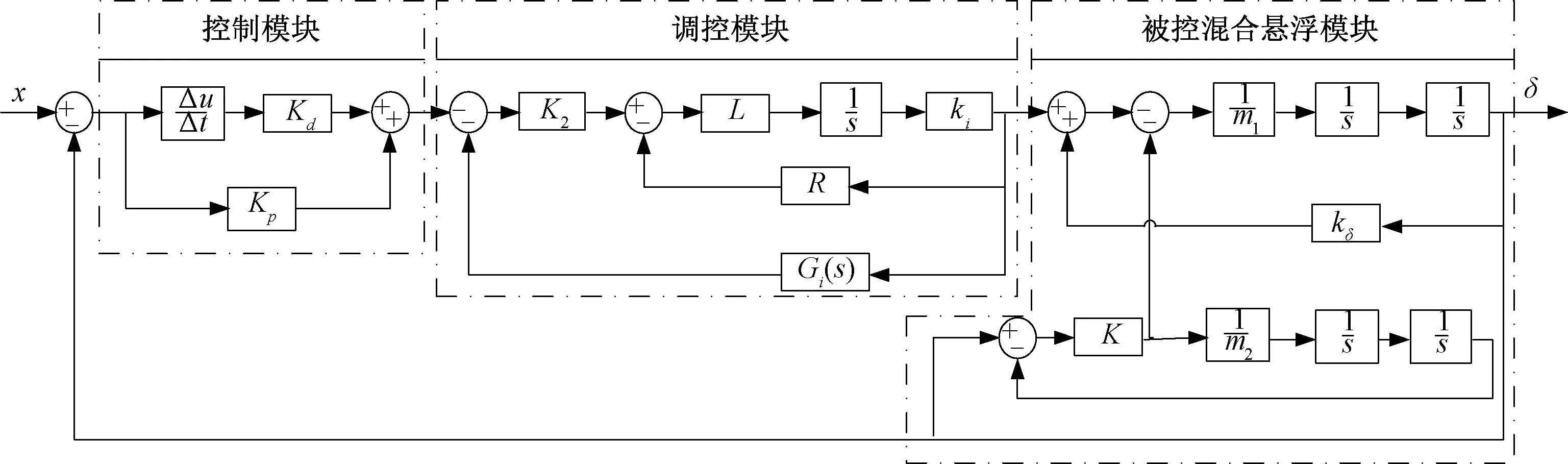
图7 模块化的混合SISO系统
D(s)=a5s5+a4s4+a3s3+a2s2+a1s+a0
(20)
闭环系统的传递函数各级参数见表2。

表2 闭环系统的传递函数各级参数
由式(20),求得可变参数K的等效开环传递函数为
(21)
进一步,可绘制出一组关于双环控制条件下的闭环系统可变参数根轨迹,见图8。
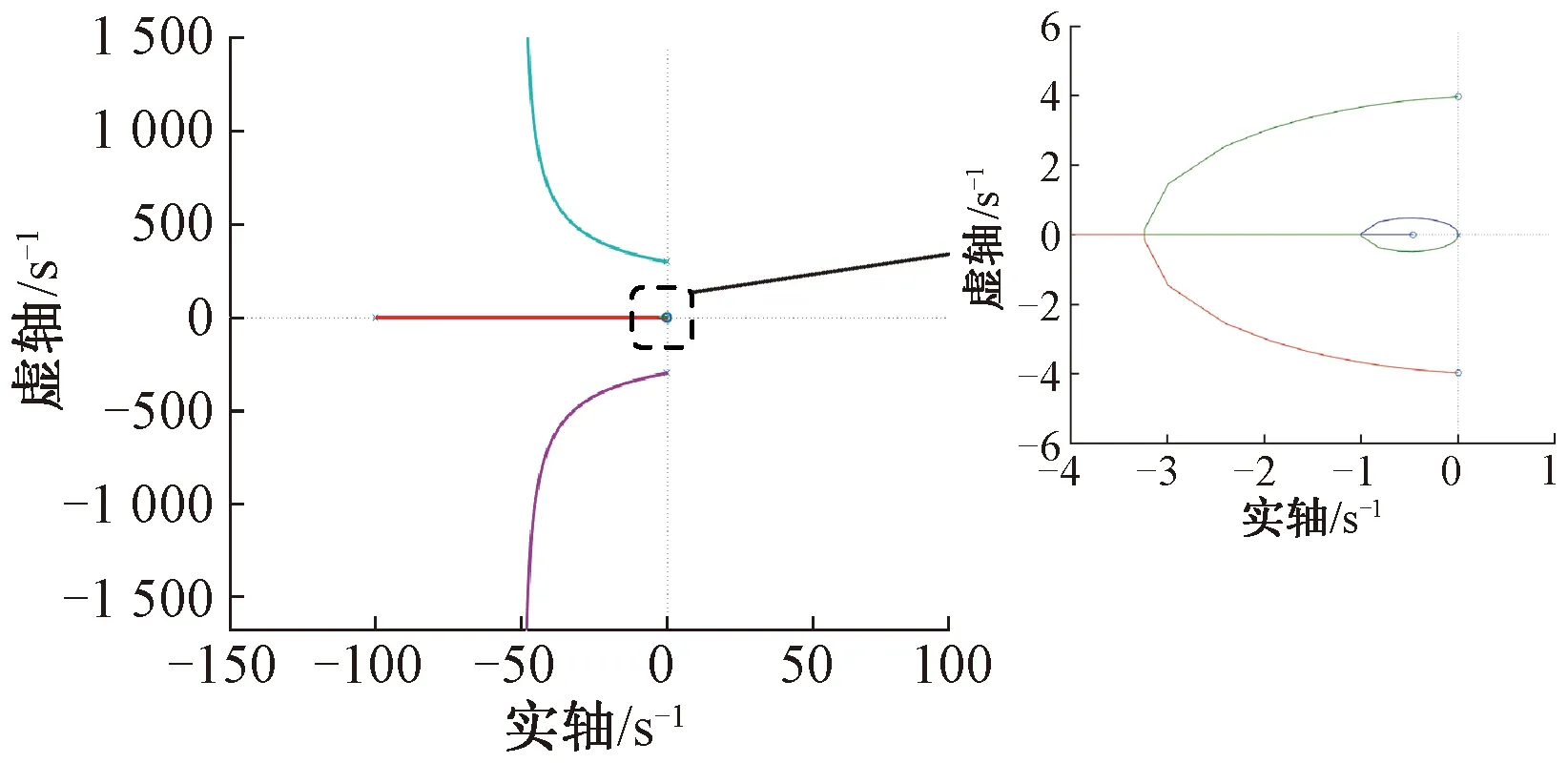
图8 关于弹性系数K的闭环广义根轨迹
相比于图2中的“无源系统”,通过电流环和位置环的反馈调控,在闭环系统中存在一个主导极点发挥主导作用,且受极点影响,系统零点由虚轴位置逐步进入左半平面,系统由临界状态向欠阻尼状态转变,即由振荡响应转变为振荡衰减响应。在左半平面里,由三条极点变化趋势可判断出,弹性系数K在一定范围内具有增加阻尼,降低了系统调节时间且不失稳定特性;当K值越过弹性一定有效范围后,则存在一对复数极点的虚、实数值急剧变大,系统逐步呈现出刚性衔接特性,也意味着混合系统失去机械弹簧的解耦意义。相关参数取值见表3。

表3 相关参数取值
结合表1、表3数据值和式(18)与式(19)的反馈环节,在2.1节的基础上,进一步验证与分析弹簧件对系统的影响,其中,弹簧系数K选取5 000(受电磁悬浮模块的影响,相比永磁悬浮模块,弹簧的弹性系数选取有所提高),仿真结果见图9。由图9可见,在电磁悬浮模块的主动调控下,车载悬浮模块(δ曲线)在响应速度上优先于弹簧,但响应速率较低于后者。受电磁调控和弹性加持的影响,在永磁悬浮间隙在0.5 s内达到预设位置,同时存在约2 s的调节时间,而系统响应的超调量基本保持在10%的范围之内。另外,车辆负载受弹簧影响,信号响应的超调相对较大,约20%,但动态调整速率较快,约2.3 s时间进入5%的误差带内。

图9 悬浮间隙与负载波动的响应曲线(K=5 000)
2.3 系统抗扰动性能分析
为了验证混合悬浮系统的抗扰性能以及弹性系数对控制响应的影响,本文将分别取弹簧系数K为2 000、5 000、10 000三组数据样本进行验证;同时分别在车辆负载与车载悬浮模块上加载2 kg的扰动信号,加载时间分别为7、18 s,扰动持续均为5 s,系统响应曲线见图10。

图10 扰动环境下的系统响应曲线
由图10中可知,在对应三组不同弹性系数的机械弹簧结构中,车辆振动和悬浮间隙之间的动态响应特性具有较为明显的差异,具体表现在弹性间隙波动和调节周期上;弹性系数越小,系统的抗扰动能力越弱,且振幅较大,调整周期较长。同时,车载悬浮块受弹簧阻尼的影响较为明显,对应调节时间和超调量均有不同程度的影响,其影响程度与弹性系数基本呈反比例关系。另一方面,在相同扰动条件下,不同的受扰目标,系统响应也有较为明显的不同。当扰动加载到车辆负载时(7 s时),系统依靠弹簧和悬浮间隙的增衰共同完成对车辆悬浮姿态的调整;当扰动加载到车辆永磁悬浮块时(18 s时),弹簧呈被动式振荡,系统对扰动调整主要由车载电磁悬浮系统进行车辆悬浮姿态的调整。
结合图9和图10的仿真结果,进一步提取了弹簧的振动调整,当K=5 000时,弹簧响应曲线见图11。

图11 弹簧响应曲线(K=5 000)
结合图10~图12,在加载弹簧的混合悬浮系统中,在不同扰动受力点下,受弹簧性能的影响,混合悬浮系统具备不同的动态特性。分析表明:来自车辆上/下人等车厢的扰动,系统可以由弹簧和混合悬浮系统共同调节;来自因轨道不平顺等因素的永磁模块瞬时扰动,系统主要依靠电磁悬浮模块的快速响应完成车辆悬浮状态调整,相比前者,电磁悬浮模块的电流波动相对比较敏锐。由图12可知,稳定电流的位置最终落实到-6 A附近,这意味着试验系统在20 mm的悬浮预设值时依靠永磁体是无法支撑全部载荷,最终由电磁悬浮结构实现悬浮负载补偿与实时响应调控。

图12 控制电流响应曲线
3 结论
在单自由度永磁悬浮模型的基础上,本文研究了弹簧阻尼结构下悬浮系统的动态响应特性。结合简化结构,建立了相关的数学模型,包括永磁悬浮模型和并联式电磁永磁混合悬浮模型;设计了串级双环PD反馈控制器,充分发挥电磁悬浮系统的主动调制优势;并在仿真环境下,分析了不同弹性系数对永磁和混合悬浮模块的影响以及抗扰动性能,可得以下结论:
(1)弹簧的引入并不能直接改善原永磁悬浮系统的不稳定特性,同时加剧了被控模型的复杂度,由原二阶系统变成四阶系统。
(2)在相同扰动下,弹簧表现出一定的减振隔振性能,但受阻尼器参数影响较大,即弹性系数过大,系统失去减振效果;系数过小,系统抖动较为剧烈;选用合理的弹性阻尼参数,有利于车辆刚性悬浮架多点悬浮结构之间的机械解耦。
(3)在混合悬浮系统中,不同的扰动环境弹簧具备不同的响应特性,且与弹性系数有直接关系。特别地,电磁悬浮结构可以实现对直线牵引电机法向力波动的实时补偿;在永磁悬浮承载不足时,电磁悬浮结构亦可实现载荷补偿与调控。
