测控设备状态分析辅助决策系统的设计与实现
2022-01-05李林峰尹志锋
李林峰,周 宇,尹志锋,周 淦,杜 兵
(中国电子信息产业集团有限公司第六研究所,北京102209)
0 引言
航天系统是一项庞大而复杂的工程,包括测发、测控、通信、气象、技术勤务等分系统[1],其中航天测控系统分为外弹道测量分系统、遥测分系统、遥控分系统、实时数据处理分系统、监视显示分系统、安控系统、引导分系统、事后处理分系统等[2],航天测控技术是指对航天飞行目标进行跟踪测量和控制的综合技术[3]。航天测控的诞生已逾半个世纪,在航天工程的牵引和电子信息技术的推动下获得了长足的发展[4]。
我国航天测控网由发射和测控中心、若干陆地固定和机动测控站及航天测量船组成,测控中心和测控站通过通信网构成一个综合体,以完成测控功能[5-6]。测控设备作为测控系统的重要组成部分,包括弹道测量设备、遥测设备、遥控设备等,弹道测量设备又包括光学设备、无线电外测设备等[7-8],测控设备的工作状态对测控任务的成功执行具有重要意义。
1 背景
随着航天试验场区安全系统的建立,作为测控系统核心的测控计算机与监视显示系统也经历了不同的发展阶段[9]。过去,测控站使用的是基于Windows操作系统、VC++集成开发环境、MFC类库实现的一体化监控系统软件[10],该软件系统实现了实时数据采集、数据传输、信息显示等功能。但是,测控设备在任务执行的过程中,可能会出现数据时延超限、时延抖动大、目标丢失、副瓣跟踪、天线抖动、光学设备逆光等问题,以副瓣跟踪为例,测控雷达在对飞行目标进行跟踪测量中,当天线处于主瓣跟踪状态时,天线随动于目标并能准确地跟踪测量飞行目标,达到测控目的[11]。但是,由于天线的副瓣也存在着若干个收敛跟踪点,因此当天线电轴未对准目标时,强信号时副瓣也可能捕获目标,造成自跟踪的假象,此时,外测数据方位角、俯仰角就不能代表目标的实际位置,便产生副瓣跟踪[12]。目前使用的软件系统对各测控设备上报的原始测量信息进行解析处理后,直接推送至显示终端进行显示,缺少对各类测控数据的分析、处理,各级测控指挥员、专业岗位人员只能凭借自己的经验,结合各类原始测量数据,判断测控设备是否工作正常,影响了测控任务的高效顺利进行。
测控设备状态分析辅助决策相关技术通过对测控设备上报的各类数据进行综合分析、处理,分析设备跟踪目标飞行器的实时性、准确性、稳定性、有效性,形成相关的辅助决策结论,为测控指挥员和各级岗位人员提供高效、直观的决策信息。
近些年来,软件插件集成技术已经得到了深入广泛的研究并日趋完善成熟[13],用户可以将不同的分析组件、显示组件进行组合使用,提高开发效率,方便软件后续各项功能的扩展[14-15]。本设计采用“主框架+组件”的软件架构形式,将测控设备状态分析辅助决策技术应用于实际工程中。
2 测控设备状态分析辅助决策技术
测控设备在执行任务的过程中,需要重点对设备跟踪目标的实时性、准确性、稳定性、有效性等因素进行分析评判,对不同类型的测控设备作出相应的状态分析与决策。测控设备状态分析要素如图1所示。
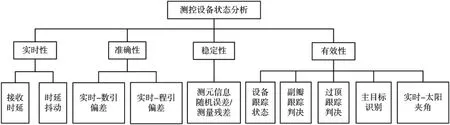
图1 测控设备状态分析要素
2.1 实时性分析
数据接收时延的计算方法如下:

其中Trecv为数据包接收时间,Tdata为数据时间,均为绝对时间。设ZQ代表设备测量数据帧频。
分析规则如下:
(1)如ΔT<ZQ,则表示数据接收时延在正常范围;
(2)如ZQ≤ΔT<5ZQ,则给出告警,提示数据时延过大;
(3)如ΔT≥5ZQ,则以显著的方式给出异常提示。
数据接收时延抖动量可通过最小二乘拟合残差法计算得到,具体过程如下:
(1)连续取相邻的11个数据时延值αj-10+1,…,αj-1,αj,不要求数据严格延续,但需等间隔;
(2)计算第j个测量数据时延值估值:

其中,B=(DTD)-1DTY,t=20(T-T0)。

矩阵中ti(i=0,1,…,n)的计算方法为ti=ZQ(Ti-T0)。
(3)计算时延抖动量为:

判决规则如下:
(1)如α≤ZQ/10,则表示时延抖动量小,正常;
(2)如ZQ/10<α≤ZQ/5,则 表 示 数 据 时 延 抖 动较大,给出告警;
(3)如α>ZQ/5,且连续出现3帧以上,则以显著的方式给出异常提示。
2.2 准确性分析
综合分析设备实时角度与数引角度、程引角度的偏差,能够评判测控设备跟踪飞行目标的准确性。其中,数引角度表示目标实际位置反算至测站系下的方位角、俯仰角;程引角度代表目标理论位置反算至测站系下的方位角、俯仰角;实时角度代表设备天线的实时方位角、实时俯仰角。在计算偏差的过程中,由于实时角度、数引角度、程引角度三者在时间上不能保证一致对齐,因此引入“三元一点不等间隔插值法”,将历史最近3个时间点的数引角度、程引角度统一外推至实时角度对应的时间点,再进行做差比较。
判断设备跟踪目标准确性的流程如图2所示。
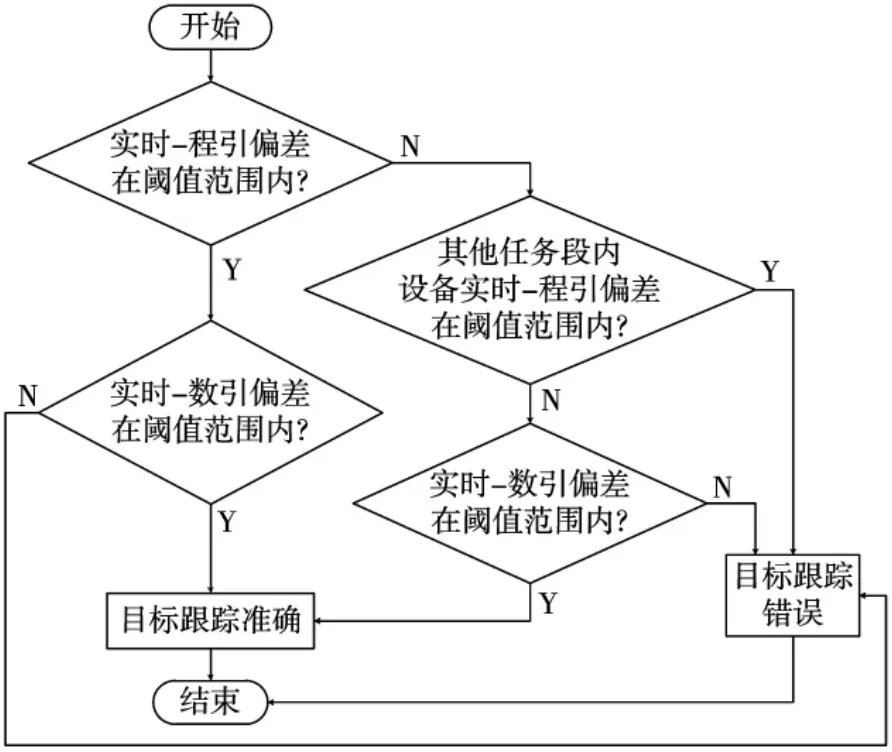
图2 设备跟踪目标准确性判断流程图
2.3 稳定性分析
通过分析、计算各测元信息的随机误差、测量残差等信息,综合判断设备天线在跟踪过程中有无抖动,测量信息是否平滑稳定。
具体计算方法如下:
对任一变量A的测量序列,用变量差分法求出其随机误差σA,公式如下:

取差分阶数p=3,步长t=4,点数n=60,则:

当积累点大于13时,开始累加Δ3Ai,然后始终保持13个最新数据点,每新增1个点,对i加1,当i=60时,得到σA。
设σ(α)是测元α的随机误差精度指标,则判决规则如下:
(1)如σA≤σ(α),则表示数据随机误差正常,设备跟踪情况良好;
(2)如σ(α)<σA<3σ(α),则给出告警,数据随机误差超限,需做好应急准备;
(3)如σA≥3σ(α),在非过顶弧段(俯仰角大于75°),且连续保持3帧以上,则以显著的方式进行异常提示。
设备测量信息的测量残差计算,可以通过式(6)计算得到:

设θ是测元的随机误差精度指标,则判决规则如下:
(1)如Δφ≤2θ,则是正常范围;
(2)如2θ<Δφ<5θ,则给出告警,数据残差大;
(3)如Δφ≥5θ,则以显著的方式进行异常提示。
2.4 有效性分析
设备对飞行目标跟踪测量的有效性取决于以下因素:跟踪模式采用自跟踪或目标随动的方式;目标跟踪处于锁定状态;跟踪过程未发生副瓣跟踪、过顶跟踪;对于能够识别多目标的雷达设备,其对主目标的识别正确;对于需要采集实时图像的光学设备,设备的实时-太阳夹角满足拍摄条件等。
(1)副瓣跟踪判决
当设备的实时-数引角度偏差超过阈值范围,且稳定在某个相对固定的值附近时,则表示有可能发生了副瓣跟踪,此时需综合考虑设备的误差电压、接收机电平、信噪比等因素,判断设备对目标的跟踪情况。
方位误差电压Ua与俯仰误差电压Ue驱动着雷达伺服机构不断追赶目标,实现对目标的自跟踪,在雷达正常跟踪目标的过程中,Ua与Ue始终向0 V进行收敛。如果雷达在执行自跟踪的过程中,Ua与Ue持续维持在一个较大电压值下,则代表可能发生了副瓣跟踪;接收机电平、信噪比表征雷达接收机接收信号的强弱,通过对历史同型号任务接收机电平/信噪比的趋势分析,实时比对分析设备当前电平/信噪比是否处于正常范围内,如果出现持续低于正常范围的电平信号,则代表可能发生了副瓣跟踪。
(2)过顶跟踪判决
一般当设备的俯仰角度大于75°时,会发生过顶跟踪现象,过顶跟踪时,设备的天线角速度往往比较大,有时会超过设备天线角速度的设计上限,且天线在跟踪过程中易发生抖动,影响测量数据质量。
在设备跟踪目标的过程中,实时采集、计算设备的天线角速度。当方位角速度VA或俯仰角速度VE超过阈值要求时,或者天线的俯仰角大于某一设定值(如75°)时,给出相应的提示信息。
(3)主目标识别
一些测控雷达具备同时跟踪多个目标的能力,当雷达同时捕获/锁定多个飞行目标时,需要判断其识别主目标的正确性。通过分析各目标的实时-数引角度偏差、雷达散射截面积RCS值、AGC电平值、目标速度趋势等信息,综合判断设备对主目标的识别是否正确。
(4)光学设备实时-太阳夹角判断
设备天线实时角度与太阳之间的夹角的计算流程如图3所示。
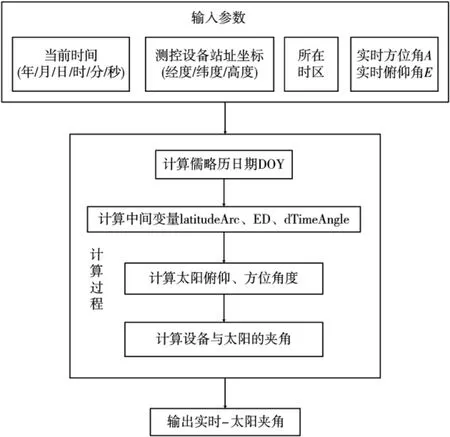
图3 设备实时-太阳夹角计算流程图
其中,太阳俯仰角度计算公式如下:

太阳方位角度计算公式如下:


设备天线角度与太阳夹角的计算公式如下:
上述公式中,latitudeArc表示将测控设备站址纬度转换为弧度后的值;dTimeAngle是根据年/月/日/时/分/秒时间信息、设备所处时区信息等计算得到的角度差中间变量;ED表示将儒略历日期转换后得到的视差中间变量;A/E表示设备实时方位角/俯仰角。
当光学设备与太阳的实时夹角AeAngle位于±15°范围内时,及时向决策层提供提示信息,报告光学设备的逆光情况,该条件已不利于光学设备对目标进行拍摄。
3 系统软件设计及实现
测控设备状态分析辅助决策系统的软件架构设计如图4所示。系统由汇集分发与处理软件、指挥决策显示软件、数据存储与管理软件、数据快速分析软件等配置项组成,与本系统相关的外部系统包括遥测、外测、安控等测控设备以及达梦数据库、原码数据文件、分析报告等。本系统基于64位银河麒麟4.0.2版本操作系统进行开发,对实时性能要求较高的软件采用C++语言(IDE基于Qt5.12.5)进行开发;事后分析软件采用B/S架构进行实现,后端分析算法采用Java语言进行开发。
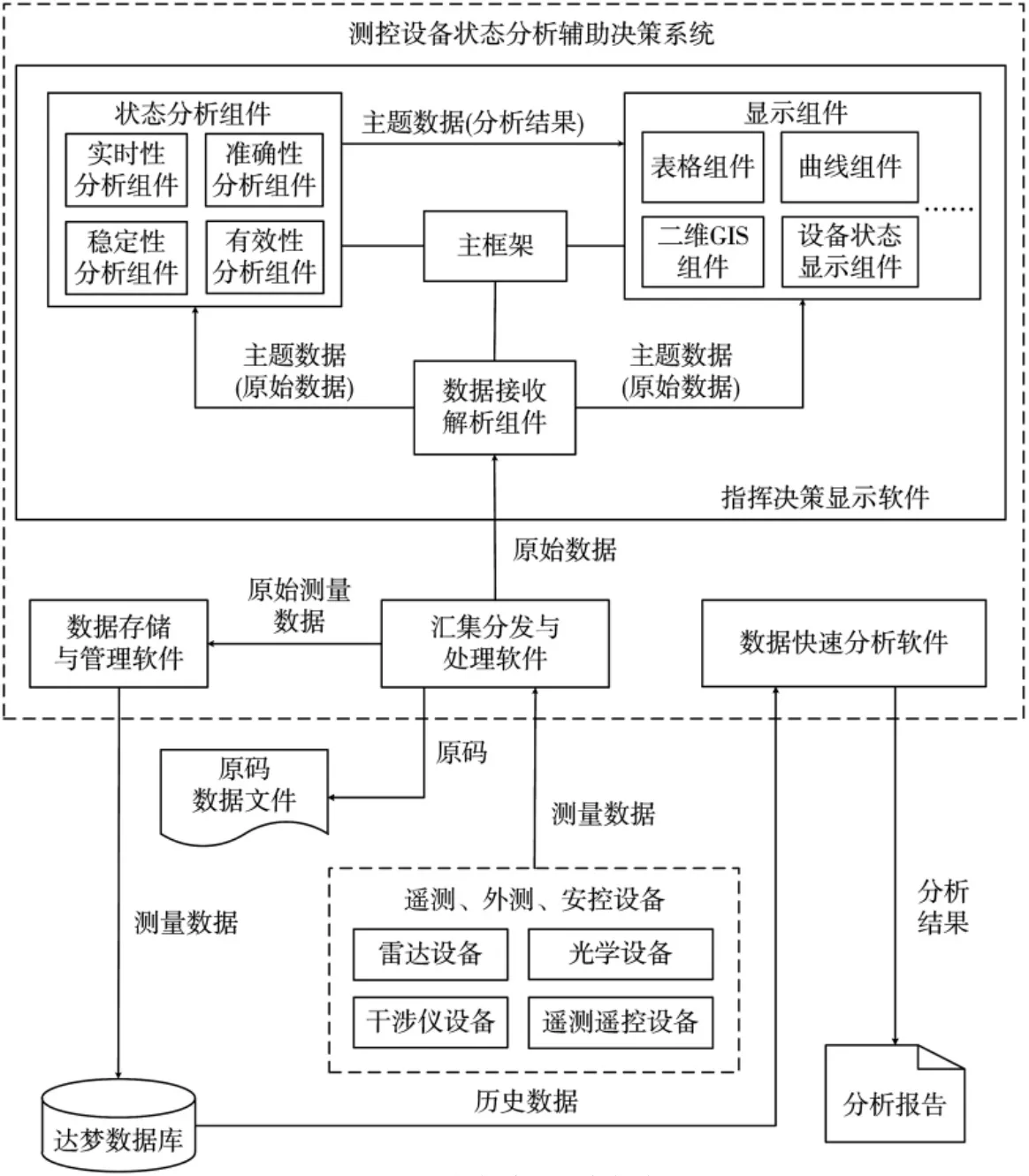
图4 系统软件设计架构图
汇集分发与处理软件做为整个系统的入口,负责接收各类测控设备(包括遥测设备、外测设备、安控设备等)上报的原始测量数据信息,并对接收到的各类数据信息进行预处理校验,通过合法性校验的数据被转发至内部系统的指挥决策显示软件以及数据存储与管理软件。同时,软件按照数据发送源、数据平面(一平面数据/二平面数据)、数据正确性(正确数据/错误数据/所有数据)等分类标准,将所有接收到的原始数据存储至指定的原码文件,方便任务结束后查看原始数据以及数据的回放复盘。汇集分发与处理软件以A/B机双活热备的方式进行工作,A、B机同时接收来自测控设备两个平面发送的测量数据,但只有主机向内部系统转发数据,且只转发其中一个平面的数据。部署于A、B机的双活热备监视进程为常驻进程,通过互相发送心跳信息的方式实时监控本机与伴机的软件状态,实现A、B机之间的无缝主备切换。汇集分发与处理软件的工作原理与部署示意图如图5所示。
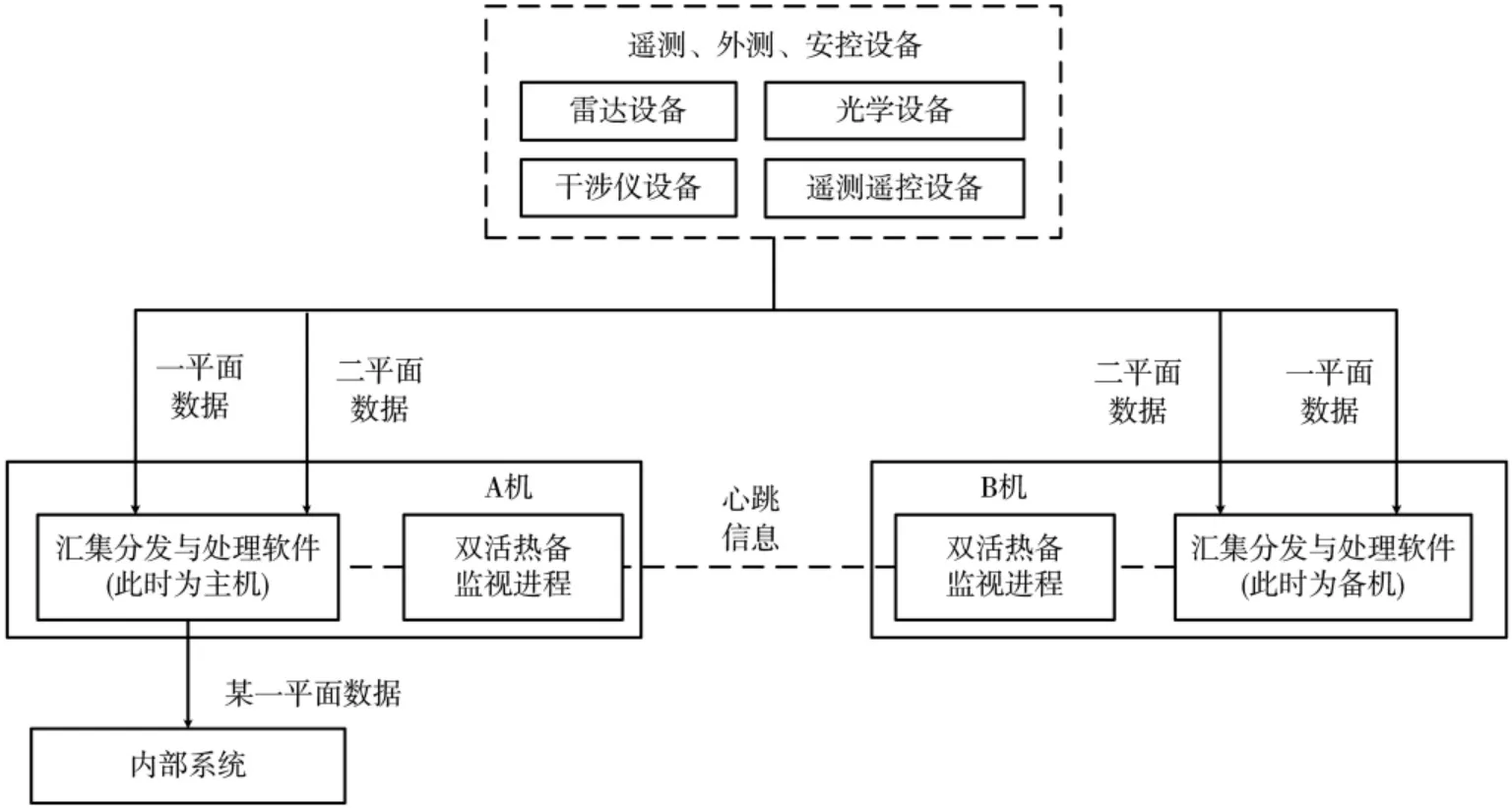
图5 汇集分发与处理软件工作原理图
指挥决策显示软件由主框架、数据接收解析组件、若干个状态分析组件、若干个显示组件等组成。主框架负责初始化加载数据解析组件、各状态分析组件以及各显示组件,调度各个组件之间的信息传递,实现从数据接收到解析处理、分析决策,直至最后前端展示呈现的功能;数据解析组件负责监听、接收汇集分发与处理软件转发的测控设备原始测量数据信息,并按照信息约定格式对各类数据进行解析,将繁杂多样的数据格式进行归一化整理,形成格式相对统一的主题数据,分发至各状态分析组件和显示组件;状态分析组件负责对各类测控设备的运行状态进行实时分析,各状态分析组件从数据解析组件获得统一格式的主题数据后,对测控设备的各类测量数据进行实时性、准确性、稳定性、有效性分析,并将分析结果和决策信息制作成格式统一的主题数据,分发至各显示组件;系统使用的显示组件主要包括曲线组件、表格组件、二维GIS组件、设备状态显示组件等,显示组件在收到数据解析组件和状态分析组件分发的主题数据后,按照显示组件的具体配置及显示功能,对各类原始测量数据、状态分析结果、辅助决策信息等进行显示,以直观的方式向测控指挥员和各级岗位人员提供有价值的决策信息,对于出现的异常信息,能够在软件主界面以显著的方式进行显示,并给出相应的提示信息。
数据存储与管理软件在接收到汇集分发与处理软件转发的原始测量数据信息后,对数据进行解析处理,并将测量数据信息存储至国产达梦数据库。
数据快速分析软件负责在任务结束后,从数据库中加载任务历史数据,按照测控设备状态分析辅助决策技术,对已经结束的测控任务进行综合分析,并自动生成电子版评定分析报告。报告内容既包括图表、曲线等直观的呈现数据,又包括相应的文字性结论,帮助测控系统工程师、各级指挥人员在任务结束后第一时间了解、掌握设备的任务完成情况。
4 工程应用
系统在实际测控任务中运行时,汇集分发与处理软件的丢包率小于10-7,主备机的切换时延小于100 ms,且主备切换时,同类型数据的丢帧数小于2。
指挥决策显示软件显示内容准确直观,分析结果客观可靠,无错判、漏判问题。例如,当设备处于过顶段时,天线抖动明显,与数引、程引角度偏差较大且天线角速度较大,指挥决策显示软件能够在相关的显示组件显著标识测元信息随机误差、角度偏差、天线角速度超限的段落,并按照异常类型的不同,在异常信息显示区域做出分类提示。
任务结束后,数据快速分析软件能够正确形成分析结果,并且在1 min内快速、自动生成电子版分析评定报告。
因此,本系统能够服务应用于实际的测控任务,保障测控任务的高效、顺利进行。
5 结论
本文基于各类测控设备的不同特性,设计了一套分析、评定测控设备任务执行状态的系统,并通过“主框架+组件”的形式实现了相应的软件系统。通过该系统,测控指挥员及各级岗位人员能够第一时间了解测控设备的任务执行状态,直观掌握测控设备对目标执行跟踪任务的各项指标是否正常,及时对测控任务中出现的各类告警信息、异常信息进行处置,有效提高了测控任务的指挥效率。