ADS-B信号干扰源自动监测与粗定位技术研究*
2022-01-05赵泽荣
赵泽荣,胡 飞,伍 伟
(中国民用航空飞行学院,四川 广汉618307)
0 引言
交通运输业的繁荣是现代社会文明与进步的标志之一,但其持续性高速发展的背后也逐渐暴露出一些问题。如当前民航机场及其相关航线所表现出的拥挤情况正在日益加剧,继而导致航班准点率下降愈发严重,不仅显著增加了航班调度工作量,同时也会造成一定程度的经济损失。为了较好地缓解这一问题,除了通过某些行政手段与管制制度加强空域与航线的管理与规划外,另外一个非常重要的途径就是通过采用更为先进的机载设备,配套部署并建设更为完善的“空-空”与“地-空”数据链以及将相关地面设备进行升级等,继而建立起一个更高效与立体化的空管监视、运行与管制的设备体系。广播式自动相关监视系统(ADS-B)正是在这样的需求前提下应运而生的[1],且已在不断的试验性应用中逐步得到发展和成熟。
ADS-B监视技术采用广播方式传输信号[2-3],通信链路和报文协议公开,导航源信息来自GPS信号。而且基于该监视技术本身的低成本和先进性,其已经在民航系统大范围使用。由于信号传输过程中并没有对数据进行加密处理,而且无线信号的模拟技术门槛比较低,导致ADS-B监视系统中的导航源GPS信号容易受到外部干扰,使得地面监视终端的目标显示出现不连续或消失的情况,这给地面管制员在指挥空中交通时带来了安全隐患。因此对于GPS信号干扰源的排查和定位是每个机场通导人员日常维护的主要工作[4]。为了提高机场通导人员排查GPS信号干扰源的效率,根据ADS-B无线信号传输原理、地面信号接收处理机制,本文提出了一种自动监测技术,利用ADS-B地面站接收的目标数据,实时跟踪每个目标的运动轨迹,制定跟踪规则和算法,开展GPS信号干扰分析,准确获取GPS信号丢失和恢复的时间、经纬度、高度等数据,并与飞机的飞行轨迹进行对比分析,同时将分析数据展现在电子地图上,拟使用飞行大数据提升人工排查GPS信号干扰源工作的效率和及时性,从而减少民航飞行安全隐患。该技术处理方法在不改变现有ADS-B系统的基础上,只是对ADS-B监视软件系统进行功能扩展,并利用ADS-B数据实现了该系统干扰源的实时监测和粗定位,通过监视显示软件实时展现无线信号干扰的方位,为ADS-B监视系统无线信号干扰提供了一种有效的技术解决方案。
1 信号干扰监测分析平台设计
当ADS-B监视系统无线信号受到干扰时,维护人员只能根据管制员提供的大概方位去排查无线信号干扰源,导致排查范围大、收效甚微,从而增加了无线信号干扰排查的难度和成本。随着大数据处理技术、人工智能技术的发展,根据ADS-B监视系统的信号传输原理,在现有软件系统中,通过实时接收处理ADS-B监视系统获取的目标数据,并设计目标跟踪、丢失和恢复处理算法,可实现ADS-B监视系统的无线信号自动检测处理,减少管制员和维护人员的工作量,提高飞行安全保障能力。系统处理技术构架如图1所示。

图1 系统处理构架
1.1 ADS-B系统无线信号传输原理
机载ADS-B无线信号由机载设备通过获取GPS信息、高度信息、速度信息以及飞机当前的状态信息等并进行信息编码,然后以一定频率通过射频模块对外广播。在信号广播的过程中,当GPS受到干扰,或机载设备故障,或ADS-B数据链受到干扰时,需要研究ADS-B机载设备对外广播信息的处理机制以及纠错机制,并对信号的可靠性和连续性进行分析,为信号丢失的判断提供理论依据。
为了有效快捷地定位地面监视终端显示界面目标丢失的原因,需要对整个系统的信息处理原理进行分析和研究,确定目标信号丢失的本质,为维护人员提供排故的参考依据。系统信息处理原理如图2所示。在图2中,飞机或无人机加装了ADS-B机载发射装置,通过该装置获取GPS信号,并把定位信息进行编码以ADS-B数据链对外广播[5],地面接收站把接收到的ADS-B信号进行解析,然后以网络的方式传输给管制中心,管制员通过显示终端对空中交通进行指挥调度。对于显示终端界面信号丢失的原因有多种可能,如数据网络传输、ADS-B地面站故障、ADS-B无线信号受遮挡、ADS-B数据链信号受干扰、机载ADS-B发射装置故障以及GPS信号干扰等。因此需要对系统的网络、ADS-B地面站工作状态进行实时监控,在网络和地面站正常工作的情况下,通过ADS-B地面站接收空中信号的情况,对ADS-B数据链的无线信号是否受到干扰进行跟踪和分析判断。
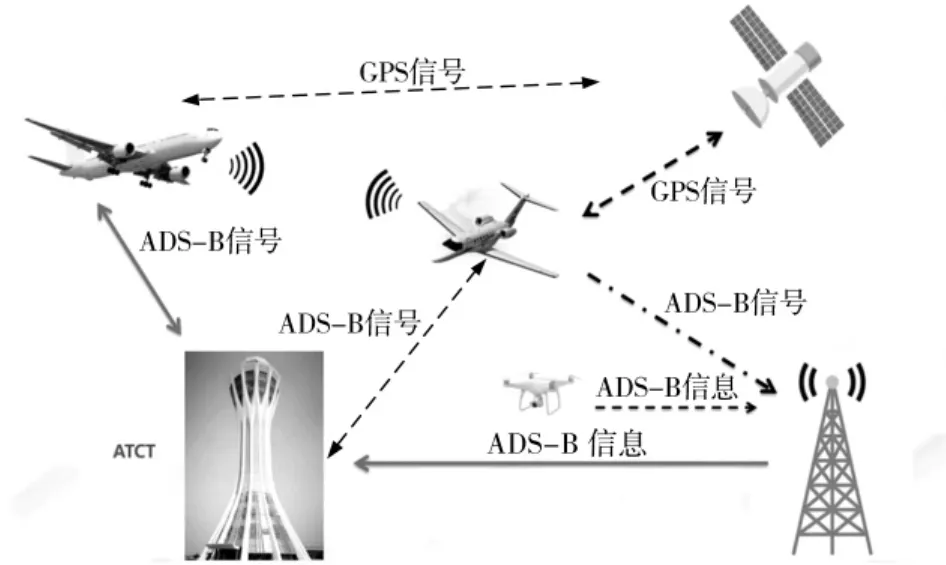
图2 ADS-B信号传输原理
由于ADS-B地面站接收目标范围有限,按照行业标准,ADS-B地面站接收的半径范围一般在380 km左右[6],而且ADS-B无线信号的传输必须是视距传输,如果ADS-B无线信号在传输过程中有遮挡,那么地面站接收的信号就会不连续,因此在制定目标跟踪规则时,不仅要考虑目标离ADS-B地面站的距离,还要考虑目标的高度,这样分析出的目标在终端界面信号丢失的结论会更加客观和科学。对于飞机上ADS-B机载设备的运行状态,可以通过飞行员来确定是否正常,而无人机则通过数据链传输的设备状态信息来进行监测。由于载人飞机上的ADS-B机载设备是经过适航取证,发生故障的概率很小,因此在监测GPS信号干扰的处理过程中,在确保监测网络和ADS-B地面站正常的情况下,利用ADS-B地面站无线信号完好性监测功能以及与监视终端界面显示结果的比对,确定某些区域目标在监视界面显示的不连续性是否为GPS信号干扰,为信号干扰源的排查提供依据。
1.2 目标跟踪、丢失和恢复处理算法
飞机在地面的监视终端上消失的主要原因有软硬件的原因、网络传输原因以及无线干扰。然而在多数的实际运行中,飞机在监视界面出现丢失的情况只是个别飞机在某个特定的高度和区域范围内发生间断性的消失,因此对于软硬件和网络传输出现故障是可以排除的,可以解释导致这种现象发生的可能只有无线干扰。无线干扰涉及ADS-B数据链和GPS接收机的无线干扰两个环节。由于ADS-B监视系统的地面接收设备是全向接收,如果是ADS-B数据链的无线干扰,那么会造成大面积的信号丢失;而GPS信号一般在普遍知晓的频率上发射,其调制特征广为人知,信噪比较低[7]。GPS信号到达地球表面时接收到的最小信号功率为-130 dBm,比收音机天线接收到的功率低10亿倍,相当于1 000英里外一个25 W的灯泡发出的光,因此极易受低功率频段干扰影响[8],从而容易造成个别飞机在某个特定的高度和区域范围内发生间断性的消失。因此本文研究主要针对GPS信号受到干扰时的干扰源排查和定位[9]。
当GPS信号受到干扰时,对于运输航空,机载设备比较先进,可以有相应的处置和提醒机制[10];而对于通航飞机,受成本的制约,这些功能是不具备的。而且GPS信号的干扰源通常来自于地面,由于通航飞机飞行高度有限,相对于运输飞机而言更加容易受到干扰[11]。因此对于机场的电磁环境净空保护一般都是监测距离机场30~40 km范围,完全满足ADS-B地面站接收信号覆盖范围。为了有效简便地获取GPS信号干扰源的大致位置,在监视系统的服务器端获取ADS-B地面站的目标数据,并对目标在空中的态势进行跟踪,由于GPS信号受到干扰时[12]机载ADS-B发射器是不对外广播ADS-B信号的,因此导致地面监视系统无法接收受干扰目标数据,考虑到无线信号的不可靠性,ADS-B数据链无线信号在传输过程中会丢失的情况,所以在跟踪目标时,如果目标连续4 s内没有收到无线信号,那么就认为目标信号丢失并记录目标丢失时的位置、高度、时间、目标呼号、目标地址等信息。设目标信号丢失的位置为pi(xi,yi),目标信号出现的位置为qi(xi,yi),li(xi,yi)为这两点的中心点,且:

根据两点间的距离公式:

可以得到目标信号丢失与出现两点间的距离Li,设Lmin=min(Li)为这些距离值的最小值,并设lc(xc,yc)为li(xi,yi)的中心点,且:

持续接收地面站的数据并对收到的目标信号与丢失目标进行对比,如果收到的目标信号为丢失目标,那么记录丢失目标出现时的位置、时间和高度,通过后续一段时间的观察,获取多个观察点并计算出lc(xc,yc)与Lmin,利用lc(xc,yc)点作为圆心、Lmin为直径,构建无线信号干扰估计范围。如果还有同样的情况在该范围发生,那么就可以确定这个方向上有GPS信号干扰[13],维护人员就可以利用无线信号干扰探测设备到该区域进行排查,从而降低了排查难度和排查范围,提高了排查效率。
1.3 自动监测软件设计
为了利用ADS-B数据对无线信号的干扰进行监测,需要在ADS-B监视系统中对软件功能进行扩展,构建ADS-B数据实时监测分析平台,根据ADS-B数据跟踪算法,实现对ADS-B系统无线信号干扰监测分析的目的。ADS-B信号干扰监测分析平台设计流程如图3所示。

图3 系统设计流程图
在图3中,程序运行时先进行系统初始化,如活动目标队列与丢失目标队列缓存的创建、网络初始化、系统参数初始化、数据库初始化等;接着启动网络接收线程和定时器执行不同的任务。网络接收线程主要接收ADS-B地面站发送的目标数据。当有网络数据到达时,触发网络接收事件,网络线程就从等待状态进入处理状态。如果接收到的数据满足ADS-B地面报文协议,即进行解析数据,获取到目标的呼号、地址码、位置、高度、速度、航向等信息,更新活动目标队列,同时检测目标是否在ADS-B地面站无线信号监测作用范围内。如果目标在监测范围内,那么就判断目标是否在丢失目标队列中。如果在则记录目标恢复的位置、高度等信息,并更新数据库中的记录;定时器的周期设置为1 s,周期性地检测活动目标的信号丢失情况。如果活动目标队列信号丢失时间持续4 s以上,则把该目标从活动队列中删除,并加入到丢失队列中,把该目标的位置、呼号、高度、丢失时间记录到数据库。如果没有目标丢失,那么就进行丢失目标的显示处理并更新显示界面[14]。
2 测试与验证
为了验证该技术方法的可行性和实用性,按照图1所示的系统构架,搭建了测试平台。该测试平台运行在绵阳南郊机场,在2021年6月28日17时23分左右,塔台管制员反映有GPS信号干扰,根据ADS-B信号干扰监测分析平台进行多数据融合处理[15],维护人员很快就能从显示界面中得出信号干扰的粗略位置,较以往靠人工手写记录并统计分析的传统方法,该系统更加智能,很大程度上缩短了故障处理时间,其显示的效果如图4所示。
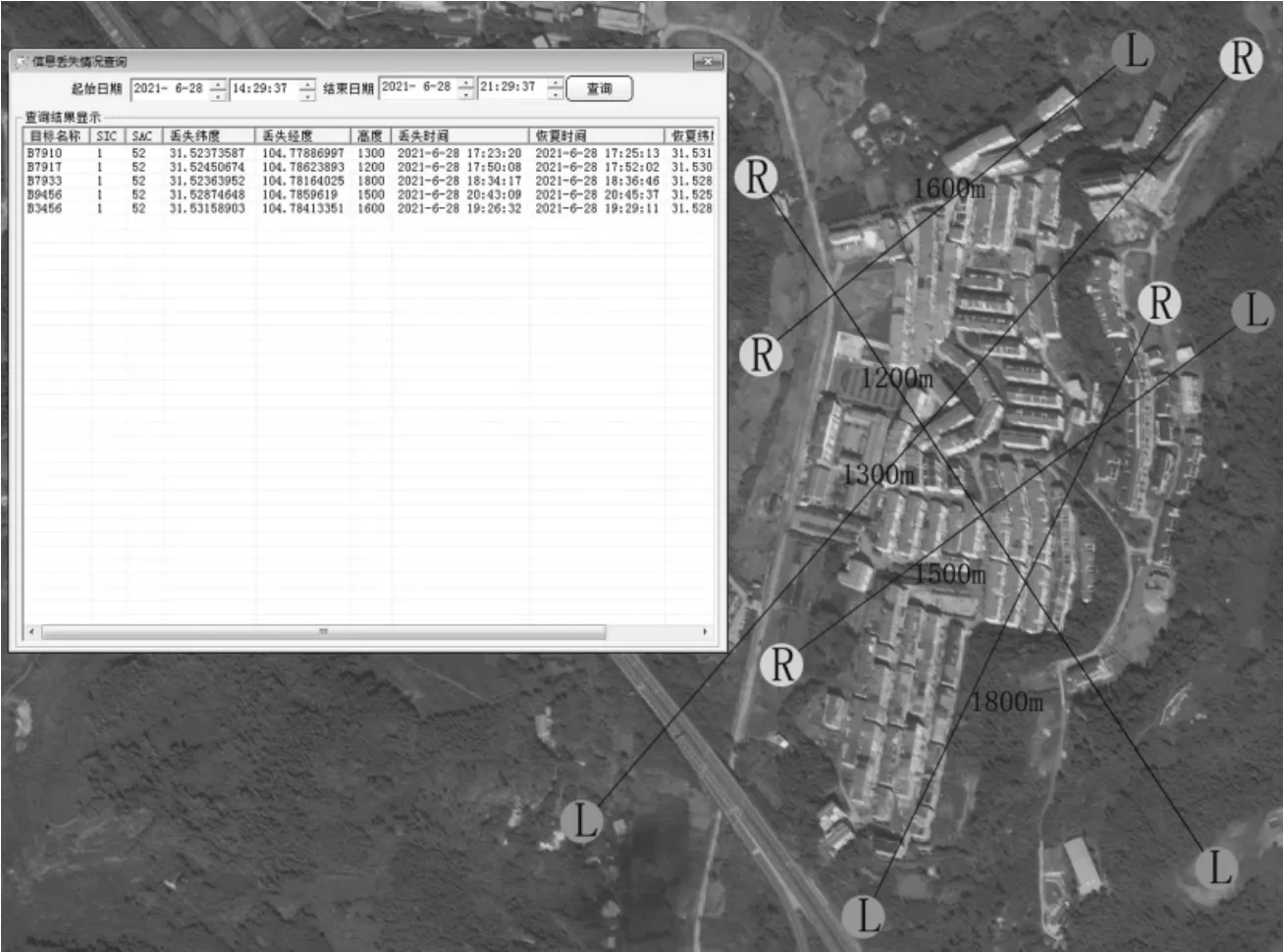
图4 GPS信号干扰示意图
在图4中,训练飞机在2021年6月28日17时23分左右以后,只要飞行经过以点(31.527 930 06,104.782 903 96)为圆心、以2~3 km为半径的区域内,GPS信号就会受到干扰,从而导致监视终端收不到飞机的飞行态势信息。按照以前的干扰源查找方法,只能知道干扰源的大概方向,不能像当前这样准确直观地在地图上展现出来,方便无线信号搜索设备探测干扰源。图4中,标注有L字母的圆点表示飞机GPS信号丢失的起始点,标注有R字母的圆点表示飞机GPS信号恢复点,连线为飞机信号丢失的直线距离,并在直线的中间标识飞机丢失信号的高度。从图中可以看出,飞机飞得越高,受到的GPS信号干扰越小,受干扰的范围就要小一些;而且通过这些线的交叉,可以大致确定GPS信号干扰源的范围。根据地图显示情况,了解到该区域为高端电子信息设备制造企业,该企业的无线电干扰测试导致GPS信号失效。因此,维护人员通过这种方式很快排除了GPS干扰,不仅提高了故障处理效率,而且也节约了成本。
3 结论
随着通用航空的发展,空域内航空器类型将会越来越繁杂,而通航的自由飞行离不开卫星导航系统。为了便于空中交通的管理,飞机上必须加装有ADS-B机载设备,但该系统存在的不足就是GPS信号容易受到干扰,给飞行安全带来隐患。但其自身技术先进性、低成本、易安装等优势,将成为未来空中交通监控的主要技术手段。因此,对于该数据链的技术缺陷,本文提出了一种通过ADS-B数据处理的自动监测和粗定位方法来确定GPS信号干扰源。通过对空中和地面的ADS-B信号处理机制以及传输原理进行分析,构建ADS-B信号干扰监测分析平台,在此基础上对ADS-B目标进行实时跟踪、丢失和恢复处理。当发现ADS-B信号消失时,对消失的时间和位置进行记录,同时对再次出现的时间和位置进行记录,根据记录的信息对飞机消失的航迹进行模拟绘制,综合多组航迹定位干扰源位置,给出分析结论,为干扰源的排除工作提供帮助。