基于上坡行驶的驾驶行为规律研究
2022-01-04梁媛媛高若曼
梁媛媛, 张 晶, 吴 正, 高若曼
(1.中国人民解放军63966部队,北京100072;2.北京交通大学 机电工程学院,北京100044)
通过分析履带式装甲车各典型任务的主要驾驶特点,发现装甲车行驶地形复杂,许多任务剖面都包括上坡道路行驶[1].因此,文中将对装甲车上坡行驶任务开展仿真研究.
驾驶员驾驶训练是为了提升驾驶员驾驶水平,提升作战效率.军队已有一些较为成熟的驾驶训练指导资料,但不同装甲车有不同的特点,现有资料不能包含所有车型的特点,如果都进行实验研究,又将增加实验周期,提高研发成本.GT-suite软件不仅可以搭建发动机工作过程仿真模型和车辆行驶仿真模型,还能搭建驾驶员模块与控制模块,模拟驾驶员驾驶行为对车辆行驶的影响,能够较好地满足对驾驶员驾驶行为的研究需求.因此,文中将针对某一车型用GT-suite仿真软件,研究驾驶员驾驶行为对车辆行驶状态的影响情况[2-5].对上坡行驶的驾驶行为规律进行仿真研究,分析不同驾驶行为、不同车辆初始状态对车辆行驶状态的影响,为驾驶员驾驶训练提供理论依据.
1 数学模型
1.1 发动机工作过程数学模型
能量守恒方程表示为
(1)
式中:m为缸内气体质量;u为缸内气体内能;QB为燃料在气缸内燃烧放出的热量;QW为气缸各壁面传入或传出的热量;ms为流入气缸的气体质量;me为流出气缸的气体质量;hs为进气门门处气体的比焓;he为排气门处气体的比焓;V为气缸工作体积;p为缸内气体压力;φ为曲轴转角.
质量守恒方程表示为
(2)
理想气体状态方程可表示为
pV=mRT,
(3)
式中:T为气体温度;R为比例常数.
1.2 车辆动力学模型
基于GT-suite软件的特点,分析车辆行驶过程中的受力情况.车辆起动后,发动机输出的扭矩经传动系统传到主动轮,半径为r的主动轮带动履带运动.地面对履带的作用力就是驱动车辆的力,可表示为
(4)
式中:Ttq为发动机输出的扭矩;ig为变速器传动比;i0为主减速器传动比;ηT为传动系统机械效率.
车辆匀速行驶在平直路面时,需克服滚动阻力Ff和空气阻力FW;当车辆行驶在上坡道路时,需要克服重力沿坡道的分力,即坡度阻力Fi;当车辆加速行驶时,还需克服加速阻力Fj.车辆行驶阻力可表示为
Fr=Ff+FW+Fi+Fj.
(5)
汽车行驶方程为
(6)
式中:G为车辆重力;f为滚动阻力系数;CD为空气阻力系数;A为迎风面积;δ为车辆旋转质量换算系数,δ>1;dv/dt为车辆加速度,m/s2.
车辆爬坡能力一般指在良好路面上克服滚动阻力和空气阻力后,驱动力的余力全部用来克服坡度阻力,即等速状态爬坡行驶,du/dt=0,所以
(7)
因此,车辆爬坡度可由下式计算
(8)
车辆行驶过程中,除了驱动力与行驶阻力平衡,发动机功率和车辆行驶的阻力功率也相互平衡.将车辆行驶方程两边同时乘上车速,经变换可得到车辆功率平衡方程.当坡度较小时,cosα≈1,sinα≈tanα=i.
(9)
2 仿真模型建立及验证
通过对比多种仿真软件发现,GT-suite软件不仅可以搭建发动机工作过程仿真模型和车辆行驶仿真模型,还能搭建驾驶员模块与控制模块,模拟驾驶员驾驶行为对车辆行驶的影响,能够较好地满足文中对驾驶员驾驶行为的研究需求.利用GT-suite软件搭建仿真模型,为后文仿真研究奠定基础.
2.1 道路模型
装甲车依靠履带与路面之间的相互作用获得前进所需的牵引力,道路特性对车辆运动有着直接的影响.文中对干燥土地道路的上坡行驶任务开展仿真研究.在GT-suite中设定路面参数,搭建道路模型,同时,在车体模块、驾驶员模块等模块中设定相应参数,开展不同道路条件下驾驶员驾驶行为规律研究.
2.2 发动机模型建立
在进行仿真研究时,如果将发动机工作过程仿真模型和整车行驶仿真模型耦合计算,则计算效率非常低.因此,在研究整车行驶过程时,使用发动机模块替代发动机工作过程仿真模型.建立发动机工作过程仿真模型,调试模型使之精度达到要求.再利用该模型计算出发动机模块所需的数据,输入到整车仿真模型的发动机模块中,进行整车仿真研究,可大大降低计算时间,提高研究效率.
基于发动机工作过程数学模型和发动机简化后的物理模型,将发动机划分为若干个系统模块.在GT-suite软件中搭建发动机的工作过程仿真模型,具体建模步骤如下:
1)将发动机气缸模块、曲轴箱模块、进排气模块、进出口环境模块、喷油器模块等各个模块从模板库中拖拽至建模区域,将各模块合理摆放.
2)根据发动机的工作原理,将发动机子系统的各个模块依次连接起来.
3)双击打开各个模块,将发动机结构参数、性能参数等输入到各子模块中.
4)将各个系统和环境条件模块连接起来,将发动机子模块与子系统集成.发动机主要技术参数如表1所示.气缸排列方式为V型60o;进气方式为涡轮增压.通过调试和修改,建立发动机工作过程仿真模型.
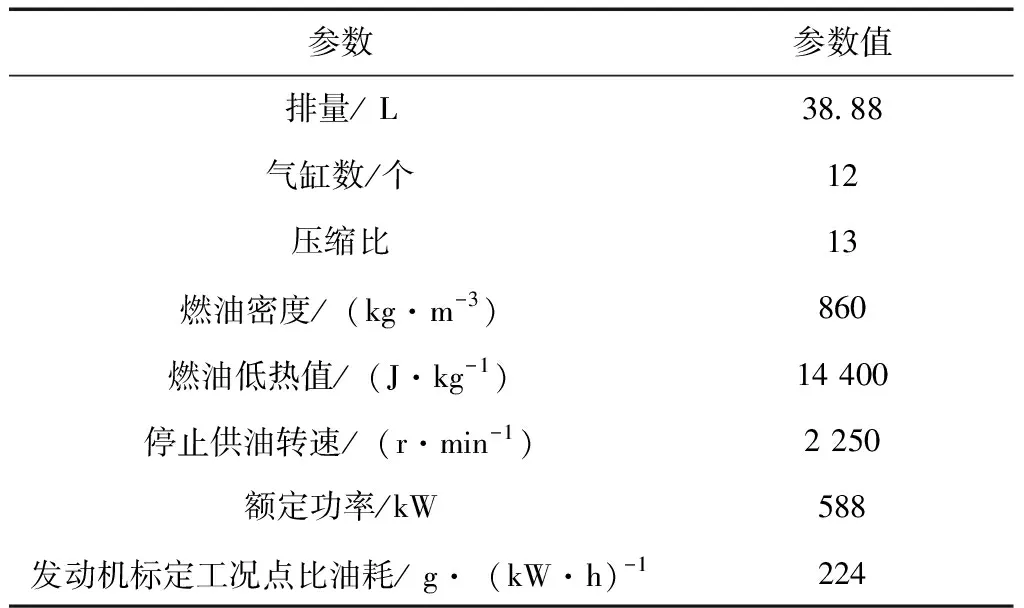
表1 发动机主要参数
2.3 整车行驶模型建立及验证
基于整车行驶数学模型和车辆物理模型,搭建整车行驶仿真模型.基于GT-suite软件的特征,同时为了简化仿真计算过程,对车辆系统作如下假设:①忽略传动系统各个部件的弹性阻尼变化;②简化传动系统的工作过程,假设传动轴仅传递转矩;③忽略车辆系统行驶过程中的震动情况;④车辆系统各个部件均以集中质量形式出现.
搭建整车行驶仿真模型主要包含以下几个部分:发动机模块、传动系统仿真模型、行驶系统模块、制动系统模块、驾驶员模块、控制器模块.首先,分别建立各部分的仿真模块,然后,将各个部分依次连接起来建立整车行驶仿真模型.进行调试并与试验数据对比进行验证,最终将模型误差控制在指定范围内.
车辆的主要参数如表2所示.搭建完成的整车行驶仿真模型如图1所示.
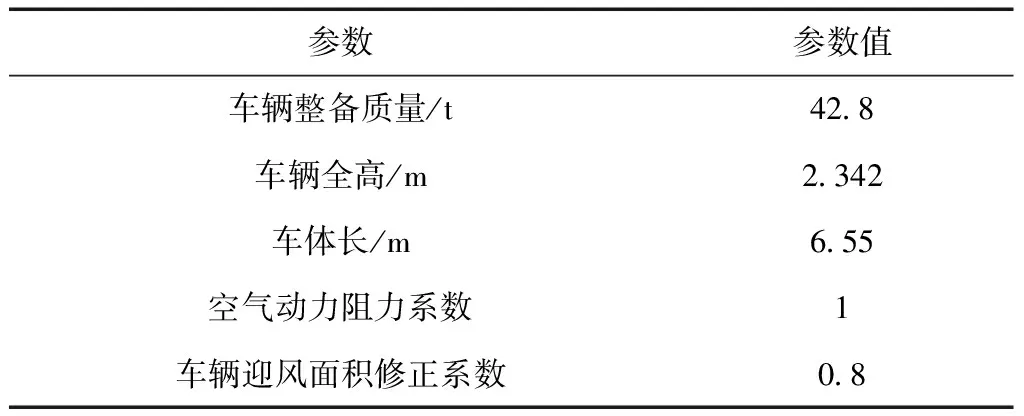
表2 履带式装甲车主要参数

图1 整车行驶仿真模型
表3为整车仿真模型的计算值与实车试验值对比结果.可以看出,整车行驶仿真模型精度达到要求.

表3 整车行驶仿真值与实车试验值误差对比
3 上坡行驶仿真研究
通过对驾驶员驾驶行为的模拟,对装甲车上坡行驶开展仿真研究[6].其中,所研究车型的最佳动力性换挡规律,如表4所示.
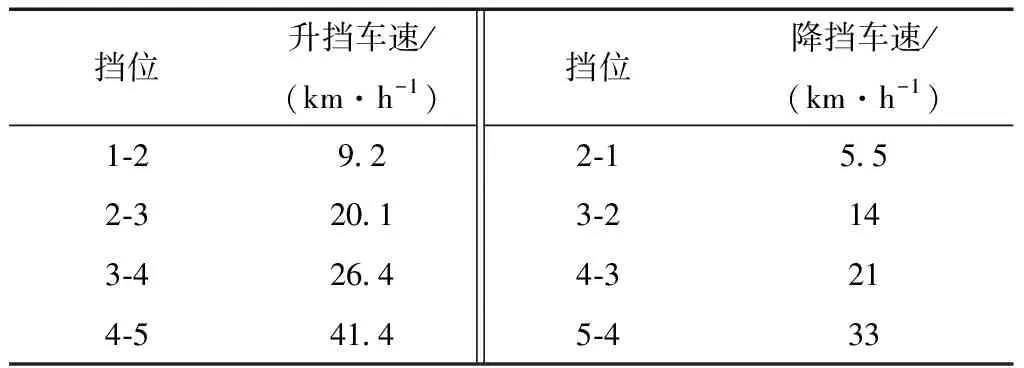
表4 动力性换挡规律
3.1 低挡、低速上坡行驶
为了研究驾驶员驾驶行为对车辆行驶的影响,接下来针对不同的坡度和长度进行仿真,研究不同驾驶行为对车辆行驶的影响情况.选择所研究车型的各挡性能参数如表5所示.
在仿真模型中设定不同的驾驶员驾驶行为参数和道路模型参数,模拟研究不同道路上的驾驶操作对车辆行驶状态的影响.一般的履带式装甲车爬坡的坡度范围在10%~25%之间,因此,针对坡度为5 %、10 %和25 %的道路开展研究.
首先,研究装甲车1挡状态下、以0 km/h的初速度,驶入不同坡度、长度200 m的上坡道路后的驾驶行为.具体设定参数如表5所示.

表5 道路参数与驾驶员动作参数设定
经过仿真计算得到如下结果.图2为在5 %的坡道上车辆行驶速度与挡位变换情况.
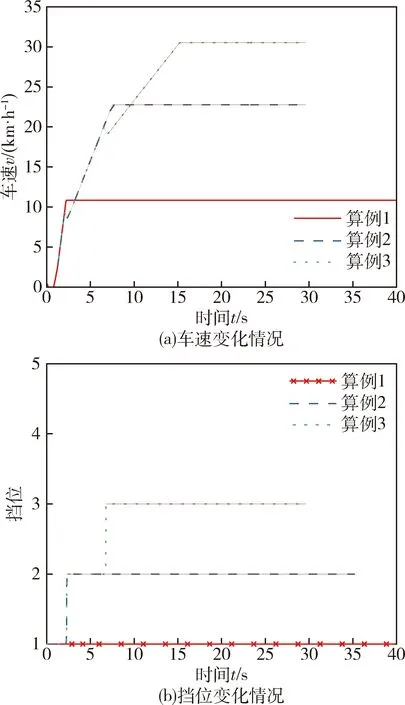
图2 5%坡道上挡位选择对车辆行驶状态的影响
从图中可以看出,坡度为5 %时,1至3挡均可稳定爬坡.且随着最高挡位的升高,车辆动力性升高,完成200 m上坡路程所需时间逐渐减少.
仿真得到车辆在10 %的坡道上的行驶速度与挡位变换情况,如图3所示.

图3 10%坡道上挡位选择对车辆行驶状态的影响
坡度为10 %时,1挡和2挡均可稳定爬坡.且随着最高挡位的升高,车辆行驶200 m所消耗的时间越来越少,动力性越来越好.约14 s时,从2挡升至3挡,车速开始下降,到27 s时,挡位切换至2挡,车速再次上升,并开始出现换挡循环现象.出现这种情况的原因是10 %的坡度超出了3挡的爬坡能力,使用3挡时后备功率不足,发动机提供的功率不足以使车辆克服滚动阻力、坡道阻力等行驶阻力.仿真得到车辆在25 %的坡道上行的驶速度与挡位变换情况,如图4所示.
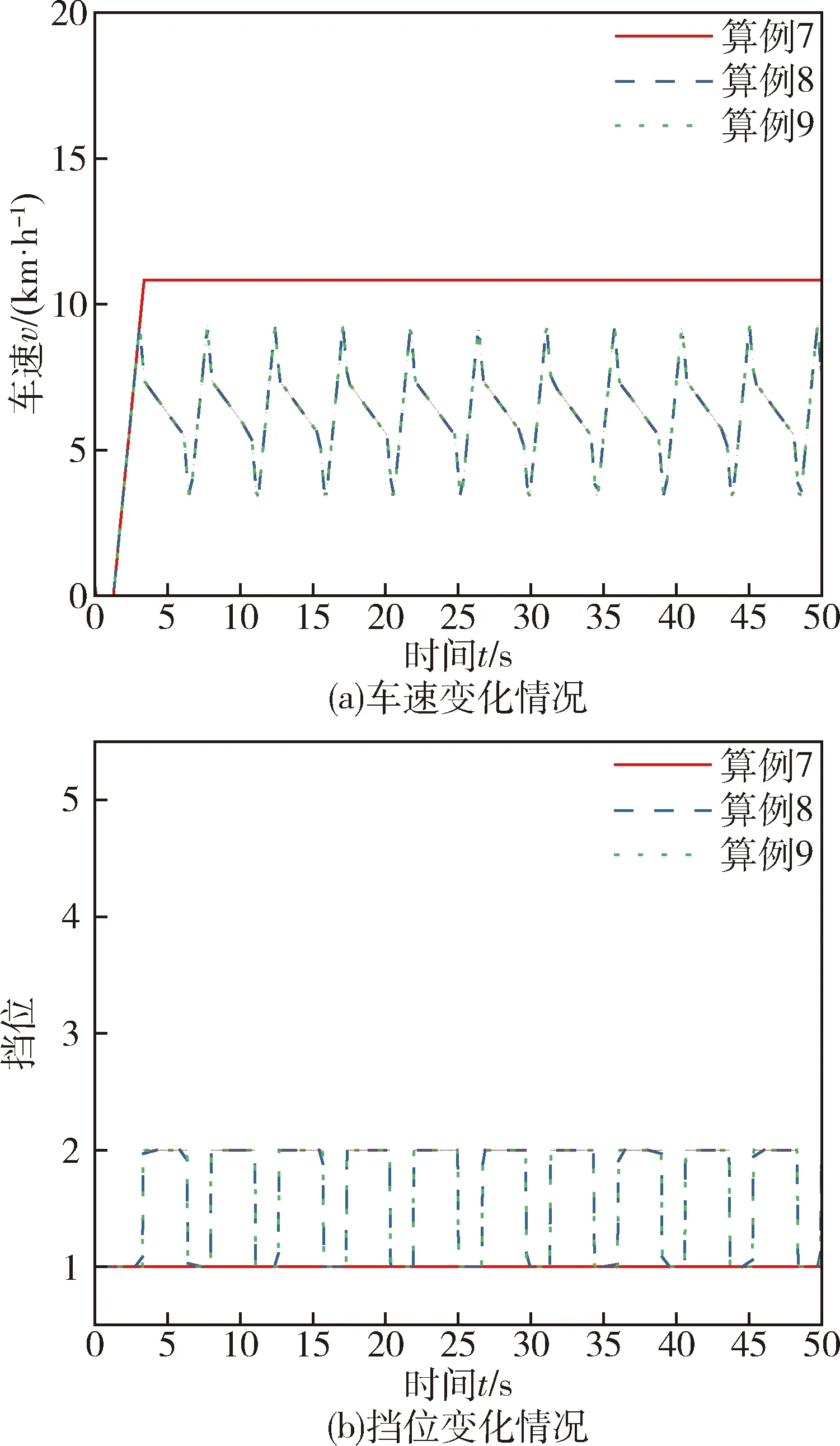
图4 25%的坡道上挡位选择对车辆行驶状态的影响
坡度为25 %时,1挡可以稳定爬坡.2挡和3挡均出现了换挡循环情况,因为25 %的坡度超出了2挡和3挡的爬坡能力,车辆后备功率不足,发动机提供的功率不足以使车辆克服行驶阻力.
3.2 中低挡、中速上坡行驶
前文仿真了车辆在上坡起点处静止出发,在上坡过程中逐步换挡、提速的过程.而在实际驾驶任务中,通常不会在上坡的起点处从静止加速,而是以某一初速度驶入上坡道路.接下来,研究车辆以不同初速度、中低挡位驶入长度为100 m坡道的情况.具体的参数设定与相应算例的仿真时间,如表6所示.
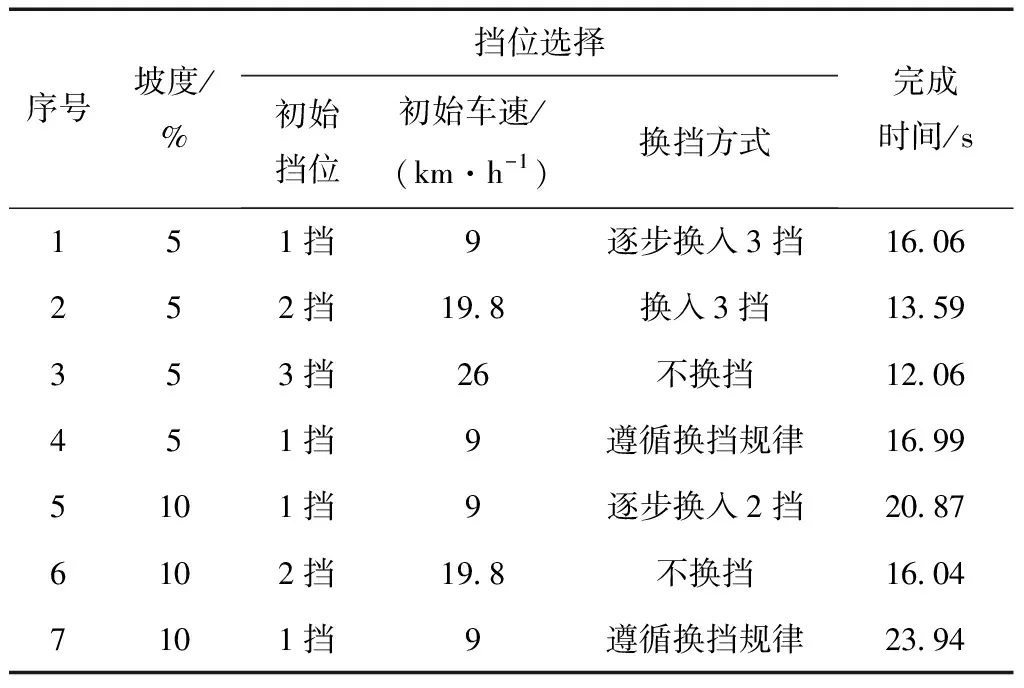
表6 道路参数与驾驶员动作参数设定与仿真结果
从上表可以看出,在坡度为5%和10%的坡道上行驶,初始挡位和初始车速越高,完成起步加速至32 km/h的时间越短,车辆动力性越好.保持坡度能够使用的最高挡位用时最短;盲目遵循动力性换挡规律的用时最长.
3.3 高挡、高速上坡行驶
车辆在高初速度、高挡位驶入长度为200 m的上坡道路时,车辆行驶状态变化规律.参数设定如表7所示.

表7 道路参数与驾驶员动作参数设定
第1至4和5至8算例的仿真结果发现,由于坡度较小,车辆高速驶入坡道时速度降低很慢,因此,在有限的距离内未到达降挡车速不需要进行换挡操作,车辆能够以很短的时间高速通过坡道.
第9~11算例仿真计算车辆在10%的坡道上,以32 km/h的初速度、4挡状态驶入上坡坡道,设定不同的换挡规律,得到的车速与挡位变换情况如图5所示.
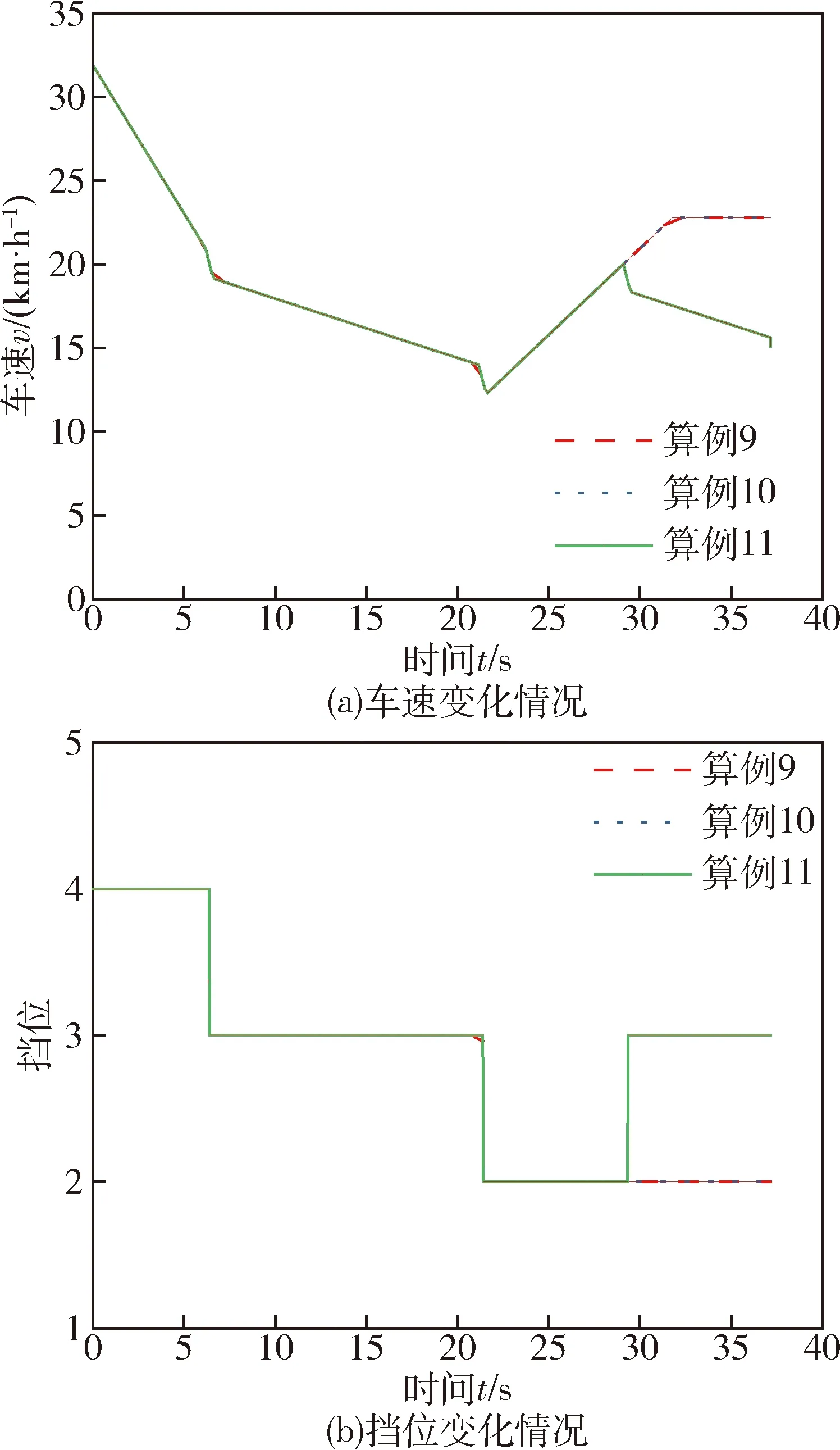
图5 10%坡道上初速度为32 km/h时,挡位选择对车辆行驶状态的影响
由仿真结果可以发现,道路坡度为10 %时,车辆动力性不足,上坡后,车速逐渐下降,因为4挡下的发动机功率不足.约22 s时,车辆速度降低到14km/h,达到了降挡车速,于是挡位切换至2挡,当保持2挡行驶时,车辆可以逐步加速至平稳行驶;当继续按照动力性换挡规律,切换挡位至3挡时,车速便又开始下降,并且照此趋势发展,可能出现换挡循环的情况.
算例12~14模拟了初始速度为59 km/h在25 %坡度的坡道上的行驶情况.受坡度阻力的影响车辆速度迅速下降,并且挡位也逐渐降至3挡.但由于初始速度高,在车速还没有到达3-2挡的降挡车速时,车辆已经行驶了200 m的距离,耗时21.36 s,所以3个算例的曲线趋势一致,不再绘制该组算例的曲线.
第15和16算例仿真计算车辆在25 %的坡道上,以32 km/h的初速度、4挡状态驶入上坡坡道,设定不同的换挡规律,得到的车速与挡位变换情况如图6所示.算例17、18与算例15、16图线非常相似,不再绘制算例17、18的曲线.

图6 25%坡道上初速度为32 km/h时,挡位选择对车辆行驶状态的影响
该车型只有1挡位的爬坡度超过了25 %,因此很容易在途中发现,车辆高挡、高速驶入25 %的坡道后,车速都迅速下降,挡位逐步下降至1挡.按照换挡规律进行换挡的例子中,挡位切换至1挡后,后备功率增大,车辆速度增加,当车速增加至9 km/h时,挡位切换入2挡,但2挡的后备功率不足以为车辆提供充足的动力,因此,车速再次降低,陷入换挡循环的行驶状态.维持1挡的例子中,车辆逐渐加速,车辆受到的行驶阻力逐渐增加,当发动机提供的牵引力与车辆受到的行驶阻力相等时,车辆受力达到平衡,车辆保持稳定车速行驶.
综上所述,驾驶员在驾驶装甲车上坡行驶时,应注意以下几个驾驶操作要点:
1)以低挡、低速驶入某一坡度的坡道时,如有提升挡位的需要,注意升挡的最高挡位,不能超过该坡度能够使用的最大挡位;
2)坡度上换挡会对车辆行驶效率有一定影响,因此,应尽量减少在上坡过程中的换挡动作;
3)如果上坡前的行驶距离足够长,驾驶员可在上坡前加速,以较高的挡位和初速度驶入坡道,比低挡位下的加速性能更好,可以减少行驶过指定坡道的行驶时间;
4)以高挡、高初速度驶入坡道.若坡道距离短,利用惯性和高挡位的动力性足以快速驶过坡道;若坡道距离中等,利用惯性并按照换挡规律逐步降低挡位,驶过坡道;若坡道过长,车速一直下降并逐步降挡,为避免出现动力不足或换挡循环情况,则应在降至能够爬上该坡度的最大挡位时,维持该挡继续行驶.
4 结 论
文中用整车性能仿真软件GT-suite建立了发动机仿真模型和整车行驶仿真模型,利用发动机模型计算得到相应数据,输入到整车行驶仿真模型中的发动机模块中,经过验证发现整车行驶仿真模型精度达到要求,同时大大提高了计算效率.基于建立的整车行驶仿真模型,通过模拟不同驾驶员驾驶意图设定换挡方式,仿真研究以不同初始车速和初始挡位驶入坡度为5%、10%、15%和25%的坡道上时驾驶员的驾驶行为规律,并分析驾驶行为对车辆行驶状态的影响,归纳了上坡行驶时,提升车辆动力性的驾驶行为规律.能够为驾驶员驾驶训练提供理论参考.
