三维扫描技术在风力发电机检测中的应用
2021-12-30李少旭
李少旭
(石家庄职业技术学院 建筑工程系,河北 石家庄 050081)
目前,我国风力发电技术发展迅速,风力发电机的单机容量和地域装机数量逐年递增.2009年,中国的新装机容量已位居全球第一,总装机量居全球第二.但我国风机的正常工作时间和发电量都和装机容量不成比例,因此,开展风机可靠性研究,提高风机的安全性,减少故障率和维修成本刻不容缓[1].如风力发电机塔筒的垂直度检测是风力发电厂日常运营维护中一项非常重要的工作,风力发电机塔筒在运行过程中,由于长期往复的循环荷载及外力影响,会造成塔筒底部地基变松,塔身发生自上而下的倾斜和弯曲,最终可能导致风力发电机塔筒倾倒.
为预防此类安全事故的发生,减少国家财产损失,需对风力发电机塔筒的垂直度进行定期安全检测.通常情况下,风力发电机塔筒的垂直度安全检测大多依靠全站仪进行测量,此种测量方法效率低,且受风力发电机晃动影响,测量结果不够精准.近年来,随着三维扫描技术的发展,给风力发电机塔筒垂直度检测指出了新的方向.三维扫描技术利用激光测距的原理,通过记录被测物体表面大量密集点的三维坐标、反射率和纹理等信息,可快速复建出被测物体的三维模型及线、面、体等各种图件数据[2].三维扫描技术的巨大优势在于可以快速扫描被测物体,且不需反射棱镜即可直接获得高精度的扫描点云数据[3].受建筑造型复杂、间距有限的影响,传统测量方式效率较低.采用基于视觉跟踪拼接和自由设站的三维激光扫描技术,获取高密度的建筑点云,利用扫描的点云提取建筑条件点、高度和轮廓线,与传统测量方式相比,点位平面、高程、边长精度均符合规范要求,且内外业时间仅为传统测量方式的二分之一,能极大地提高建筑规划验收测量的效率[4].
1 检测模拟试验
检测前,为核准三维扫描仪检测结果的有效性,以石家庄职业技术学院崇德楼前旗杆为检测对象,对比三维扫描仪与全站仪检测的数据.
本次实验垂直度检测以指南针正南方向为X轴、指南针正西方向为Y轴、规定垂直于XY平面的向上方向为Z轴,建立相对空间三维直角坐标系,建立坐标系后的检测旗杆如图1所示.

图1 建立坐标系后的待检测旗杆
其中,平面坐标定设站时测站原点坐标为X=10m,Y=-0.6 m;高程Z取旗杆底座高程为0m.在设定点依次进行三维扫描仪架设、全站仪架设,并分别采集数据并进行记录.
三维扫描仪测得的点云数据输出流程依次为:点云数据预处理→点云数据配准→点云数据去噪→点云分割→点云切片输出.点云数据预处理主要是对冗余数据进行处理,如旗帜、旗杆周边建筑物等.经检测,本次点云配准误差呈正态分布,说明本次采集的点云数据质量和配准精度均较高,能够满足本项目的测量精度要求.点云数据配准完成后,对点云数据进行冗余数据去噪、拼接.点云数据拼接完成后检查其完整性,查验点云数据分层度,进行精度分析,剔除偏差较大不能作为依据的点云数据后,根据真实有序的离散点对旗杆进行整体模型构建,并依据旗杆受风力作用下形成的不规则点云块,将点云进行分割、切片,针对测量各类图件的不同需求,通过直接取线、切片等方法制作成果图件,可更大程度上降低测量误差[5].以点云切片的最远点作为旗杆晃动的最不利点,切得旗杆底部点云坐标、旗杆顶部点云坐标,并依据旗杆顶部与底部坐标的误差,输出旗杆顶的偏移值.
全站仪则采用常规测量方式,但由于旗杆底部坐标为测量精确值,而旗杆顶部坐标受风力影响,为预估预判值,采用平均值法进行处理.取全站仪三次的测量数据,并取三次测量的均值,旗杆顶偏移值.扫描仪与全站仪测得的旗杆顶偏移值见表1-2.
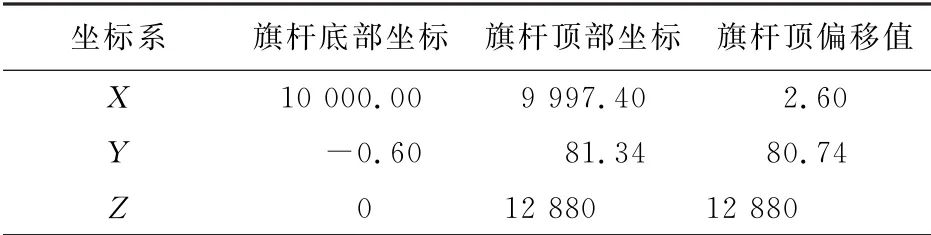
表1 扫描仪测得的旗杆顶偏移值
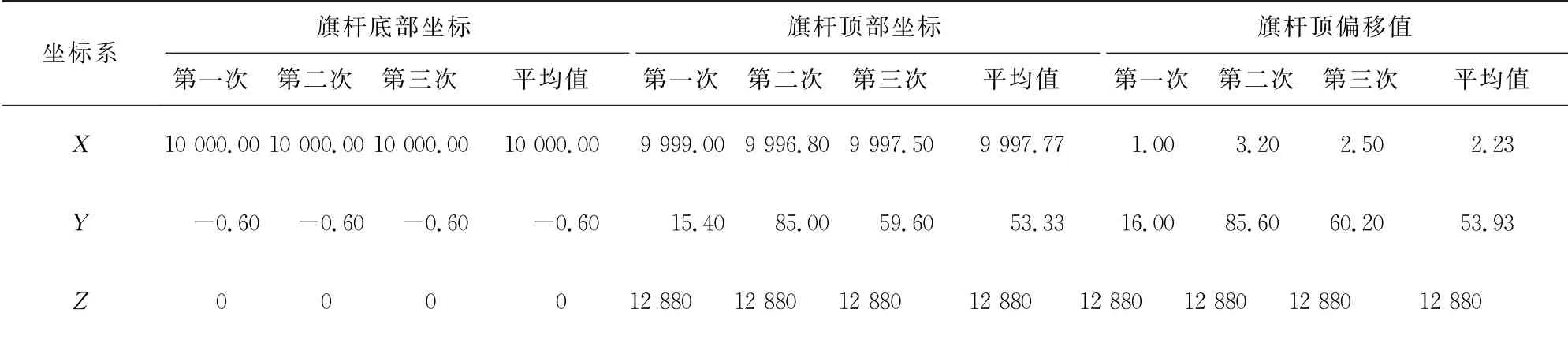
表2 全站仪测得的旗杆顶偏移值
由表1-2数据可知,全站仪测量均值X方向偏移为2.23 mm,Y方向偏移为53.93 mm.而扫描仪测得的点云数据X方向偏移为2.60 mm,Y方向偏移为80.74 mm,测得值大于全站仪测量均值.实验表明,扫描仪得出的旗杆实际偏移值大于全站仪预估预判的测量均值,若以全站仪测量均值作为旗杆顶偏移值,数据并不精准,不能实际反映旗杆顶偏移最不利点距离.故在风力发电机塔筒垂直度的检测中采用三维扫描仪点云数据判断偏移值是很有必要的.
2 实测区域概况
柏乡风力发电厂位于河北省柏乡县,赵辛线乡道从风场中间穿过,风场风机等大型设备运输较为便利,本工程总装机容量为50 MW,共安装25台单机容量为2 MW风电机组,风电机塔筒高度为80~100 m不等,建筑共占地5 500 m2.该处风力发电机塔筒的垂直度检测是风力发电机组日常运营维护非常重要的一个环节,为了提高日常检测数据处理的工作效率,提高检测精度,本次数据采集时采用了三维扫描技术,在进行点云切片数据处理时,采用了圆柱体拟合算法,以减少人工干预,使输出成果更加高效、快速、准确.
3 三维扫描技术检测三维直角坐标系建立
本次风力发电机塔筒垂直度检测涉及到的所有风力发电机,均以指南针正北方向为X轴、指南针正东方向为Y轴、规定垂直于XY平面向上方向为Z轴,建立相对空间三维直角坐标系.其中平面坐标假定设站时测站原点坐标为X=150 m,Y=150 m;高程Z取风机塔筒底部剖面高程为0 m.
4 仪器检验
本次检测使用FAR(Laser Scanner Focus)三维激光扫描仪进行点云数据采集.仪器在使用前,进行通电和测距检验等,结果表明,扫描仪各部件及其附属设备匹配、齐全,仪器各指示灯工作正常,各按键及系统显示正常,开机自检程序运行正常,自动调平程序正常,数据存储正常,数据传输正常,内置电子罗盘工作正常.在进行开关机作业及初步调平测试后,核准设备可以投入该项目使用.
5 点云数据采集
5.1 检测精度查询
点云数据采集前,首先应核准被测建筑物检测精度及倾斜允许最大值,本项目风机建筑物结构安全等级为二级.根据《建筑变形测量规范》要求,确定本次风力发电机塔筒垂直度检测精度等级为二等.项目风力发电机塔筒高度为100 m左右,根据《建筑地基基础设计规范》中的相关规定,其整体倾斜允许值≤2.5‰.
5.2 布置检测方案
风力发电机塔筒垂直度检测采用三维扫描仪进行点云数据采集虽可通过切片得出最外侧偏移点,但为减小误差及减轻内业工作量,外业检测时需在风机叶轮缓慢转动或停止转动状态时进行,采集数据时风力应小于四级.
三维扫描仪架设时,应根据不同的地形特征、被测物高度,选择适宜的扫描设站点.本次检测采用全圆四等分轴线对称设站,站点距离风力发电机塔筒X方向为150 m,Y方向为150 m.扫描仪架设点与基础中心点成直角布置,距离基础外边缘略大于塔筒高度,使得三维扫描仪能得到100 m高度处风力发电机塔筒的完整点云,并保证点云数据的采集精度.架设完后的三维扫描仪如图2所示.

图2 依据检测方案架设好的三维扫描仪
5.3 塔筒表面数据采集
三维扫描数据采集可实现无接触测量,其数据不仅包含点的X,Y,Z空间信息,还包括R,G,B等颜色信息及物体反射强度带来的不利信息.扫描时,扫描区域设置为垂直方向从-60°到90°,水平方向从0°到360°,相邻两个站点重合度达到40%~50%.每站获取的塔筒表面点约900万点,一个完整风力发电机塔筒点云数约3 600多万点,风机塔筒连续高密度点云真实还原风力发电机塔筒的各项数据,点云密度间距可达1 mm,采集精度满足要求.采集到的风力发电机塔筒点云部分数据如图3所示.

图3 采集到的风力发电机塔筒点云部分数据
6 塔筒表面数据内业处理
点云数据采集后处理的工作流程调整为:点云数据去噪→点云数据拼接→点云数据降噪→点云数据模型整合→点云数据模型分割→点云数据切片输出.
风力发电机塔筒的上下截面点云切片在本项目中被近似为平面圆,垂直度检测采用的是圆柱体拟合算法,这样可极大简化数据处理过程.
点云数据去噪处理后,虽剪除了其他建筑物对测量的影响,但为使数据测量更简易、更精准,在点云数据降噪中,将风力发电机塔筒扇叶设置为不可见,点云降噪完成后的风力发电机塔筒的点云数据如图4所示.

图4 降噪完成后的风力发电机塔筒点云数据
点云拼接后检查数据分层度,进行精度分析,剔除偏差较大的点云数据后,将点云进行分割、切片,以点云切片的最远点作为风力发电机塔筒晃动的最不利点,切得风力发电机塔筒顶部点云如图5所示.

图5 风力发电机塔筒顶部点云切片数据
将处理后的风力发电机塔筒点云数据拟合到原点坐标为X=150 m,Y=150 m的三维模型中,高程Z取风力发电机塔筒底部剖面高程为0 m,对齐原点坐标,如图6所示.

图6 拟合到原点坐标的风力发电机塔筒点云数据
风机塔筒的垂直度检测采用圆柱体拟合算法,如图7所示,在塔筒底部依据相同的原点构建与塔筒同圆心同半径的平面圆,进行拉伸后至塔筒顶部,此时可形象地观察到风机顶部圆心偏差值.
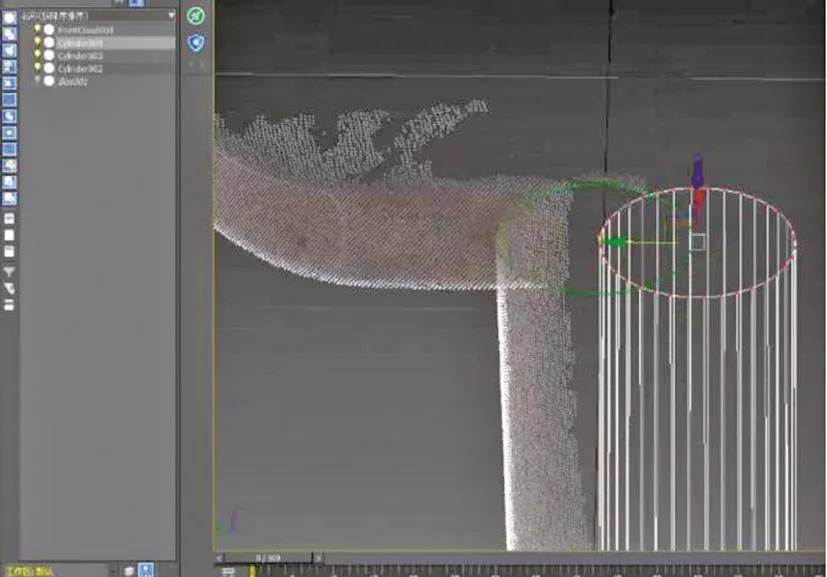
图7 圆柱体拟合算法中的圆柱构建
三维扫描仪的数据处理后,得到的风力发电机塔筒顶部偏移值见表3-4.该风力发电机塔筒顶部沿正西方向偏移2 041 mm,沿正北方向偏移88.41 mm,并且该风力发电机塔筒从塔筒筒2/3处至顶部偏移值逐渐变大,出现了不利位移.但根据《建筑地基基础设计规范》中的相关规定,该风力发电机塔筒整体倾斜允许值≤2.5‰,满足规范要求,该风机塔筒暂无安全隐患.

表3 风力发电机塔筒扫描仪顶部数据偏移值
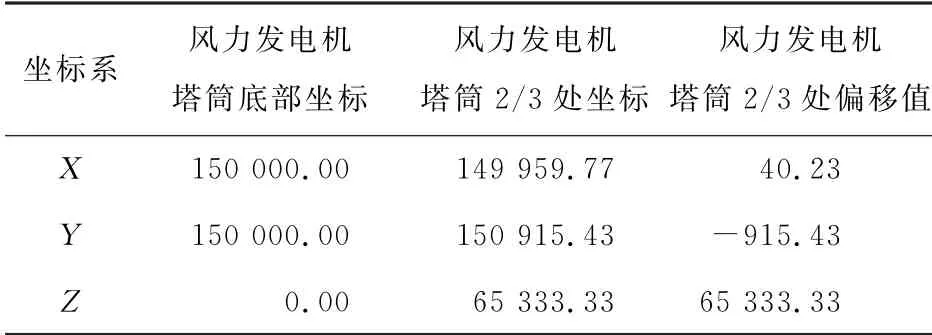
表4 三维扫描仪测得的风力发电机塔筒扫描仪2/3处数据偏移值
7 结语
本次检测利用三维扫描技术,进行点云切片数据处理后,采用了圆柱体拟合算法,精确检测了风力发电机塔筒顶部及2/3处的位移偏移值,为风力发电机塔筒垂直度检测提供了一种更高效、快速、准确的检测方法,有效地降低了风力发电机塔筒垂直度检测的工作量,提升了检测精度.
