基于脑功能网络的脑疲劳状态检测研究
2021-12-29付荣荣米瑞甫
付荣荣,米瑞甫,王 涵,于 宝,王 琳
(1.燕山大学电气工程学院,河北秦皇岛066004; 2.沈阳工程学院机械学院, 辽宁沈阳110136)
1 引 言
脑疲劳是由于人持续进行高需求认知活动而导致的一种脑机能下降的心理生理状态[1,2]。驾驶疲劳是指驾驶员经过长时间驾驶,产生生理机能和心理机能失调的现象[3]。当驾驶员产生疲劳时,具体表现在驾驶员打瞌睡、反应迟钝、驾驶操作失误或完全丧失驾驶能力,容易导致交通事故的发生[4]。通过分析道路交通事故的原因发现90%以上的交通事故都是由于驾驶员自身原因造成的[5],其中疲劳驾驶是驾驶员发生事故的主要原因之一。许多生理信号都可以作为评价疲劳的指标,比如脑电、肌电、心电和呼吸等[6]。脑电信号一直被誉为评估驾驶员疲劳的“金标准”,是最具预测性和最可靠的指标之一,因为它直接测量大脑活动,提供了丰富的有关人认知的信息[7,8]。澳大利亚的Saroj K L和Ashley C对35名非专业驾驶员进行实验,以他们在清醒状态下的脑电图(electroencephalogram, EEG)活动为基准,分析得出他们在疲劳程度不断加剧的情况下脑电图的变化特点[9]。文献[10]将驾驶员在行驶和静止时分别得到的清醒状态和疲劳状态的脑电波进行对比,得到了判断驾驶员是否处于疲劳状态的依据。但这些研究对各个脑区协同工作的连接性的研究较少。大脑是一个复杂、协同工作的系统,大脑功能执行总是依赖于多个脑区之间广泛的交互作用,而复杂网络可以很好的解释大脑的各个脑区工作时的连接性变化[11]。目前已有研究人员将脑功能网络特征参数作为分类特征,应用到诸如抑郁症、阿尔茨海默病等脑疾病的临床辅助诊断研究中[12]。文献[13]对早期轻度认知障碍患者、晚期轻度认知障碍患者和正常被试者分别构建脑功能网络,计算得到节点度、中间中心度和节点效率,采用SVM 算法得到了较好的分类结果。文献[14]模拟驾驶员在驾驶环境中的驾驶过程,采集脑电信息,提取了心率变异性功率谱参数,表明一些生理信号可以作为驾驶员疲劳驾驶认知负荷的评价参数。本文利用实验过程中采集的多导脑电数据,分别绘制脑网络并计算各个节点的度,根据脑网络的变化和驾驶员的自我反馈,得到评价脑疲劳的客观指标。
2 疲劳驾驶实验
2.1 被试者及驾驶实验任务
选择6名身体健康且没有睡眠相关疾病的男性长途客运司机作为被试者,年龄在41岁左右,驾龄均超过10年。要求被试者在实验前的连续睡眠时间不小于7 h,所有被试者必须熟悉实验流程且自愿参与实验。
在实验阶段,驾驶员下午1:00从辽宁省沈阳市出发,经丹阜高速到达目的地辽宁省丹东市,客车行驶时间约为3.5 h。
2.2 多导脑电信号采集
驾驶员多导脑电信号的采集是通过Emotiv Epoc实现的。Emotiv Epoc是一个14通道无线脑电图采集设备,能够将记录到的原始脑电图数据通过无线蓝牙技术发送到计算机上。Emotiv Epoc及其电极分布如图1所示。在实验前、实验中和实验后对驾驶员分别采集3 min左右的多导脑电信号。

图1 EMOTIV Epoc及其电极分布图Fig.1 EMOTIV Epoc and its electrode distribution
根据国际上通用的10-20导联系统标准,Emotiv除了参考与接地以外的其他14导联分别为AF3,F7,F3,FC5,T7,P7,O1,O2,P8,T8,FC6,F4,F8,AF4,覆盖了额区、顶区以及脑后部等区域, 能够反映脑活动特征。
在驾驶实验过程中,每隔一段时间驾驶员都会被问到当下的状态,使用Karolinska Sleepiness Scale(KSS)睡眠量表作为驾驶员主观判断的依据。KSS 是一个9 分制评分表,1代表极度清醒,3代表清醒,5代表既不清醒也不疲倦,7代表疲倦但容易保持清醒,9 代表极度疲倦。在驾驶员结束驾驶实验时,调查显示其疲劳程度达到了KSS=7 的状态,这样实现了在保证安全驾驶的情况下完成实验。
3 脑功能网络的构建
选取计算相位滞后指数(phase lag index,PLI)的方法来构建脑网络,引入PLI的主要目的是获得可靠的相位同步估计值[15]。将各个导联视为节点,脑功能网络的构建主要有以下6个步骤:
(1) 脑电数据预处理:选取陷波滤波器以去除50 Hz的工频干扰信号,选取8~13 Hz的带通滤波器用于提取具有α节律的脑电信号。
(2) 计算脑电信号的瞬时相位:通过希尔伯特变换来计算每个导联脑电信号的瞬时相位,设为φ(t)。
(1)
式中:f(t)为希尔伯特变换后的信号;P为积分的柯西主值;y(t)为原始脑电信号;A(t)为瞬时幅值。
(3) 计算瞬时相位差:导联i和导联j之间的相位差记为φi,j(t)。
φi,j(t)=φi(t)-φj(t)
(2)
(4) 计算PLI值:导联i与导联j之间的PLI值记为PLIi,j,
PLIi,j=|〈sign(φi,j(t))〉|
(3)
式中:〈·〉表示计算每个导联数据的平均值;sign(·)为符号函数,如果输入位于(0, π )范围内,则sign(·)= 1,如果位于(- π ,0)范围内,则sign(·)=-1。PLI的计算过程可用图2表示。
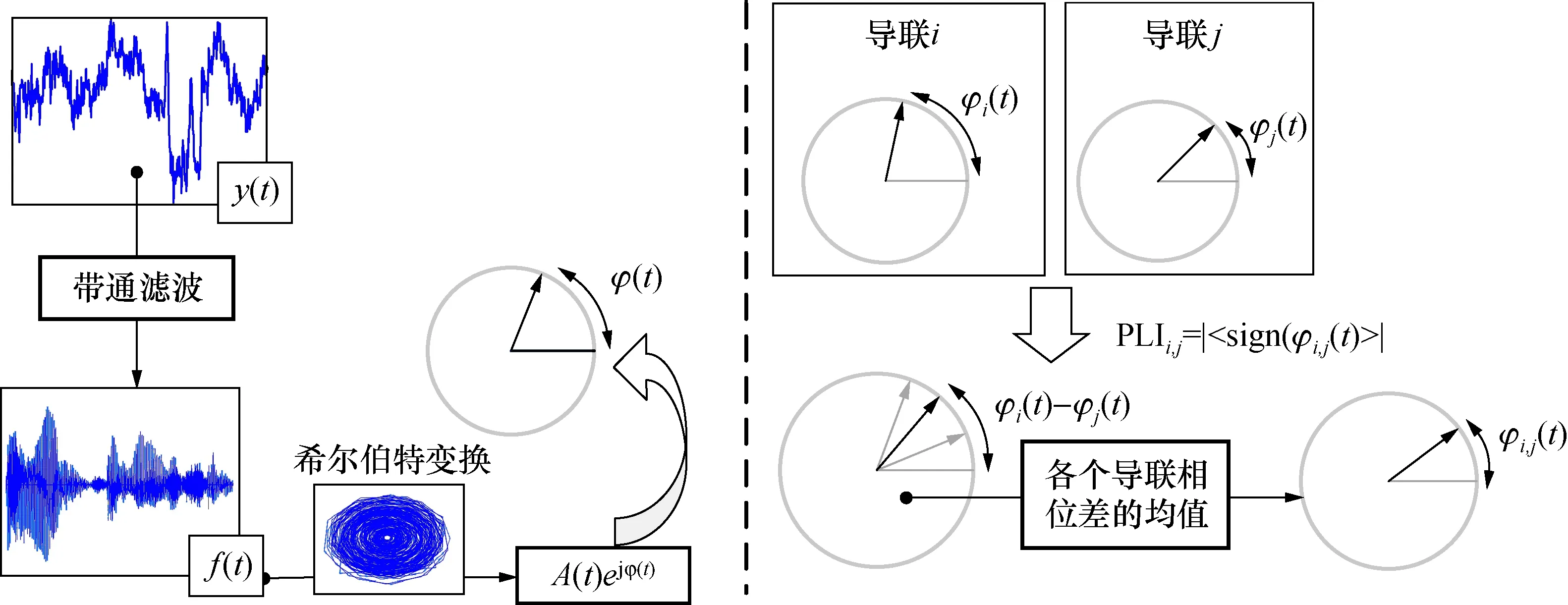
图2 PLI值的计算过程Fig.2 Calculation process of PLI value
(5) 构建PLI矩阵与二值矩阵:通过PLI计算所有导联的同步相位之后,利用这些PLI值构造相邻矩阵,并选取合适的阈值,构造二值矩阵。阈值选取的过小,则构建的脑网络基本处于全连接的状态;阈值选取的过大,使得脑网络中的孤立点偏多。当节点的PLI值大于所设阈值时,二值矩阵中对应元素的值为1;当节点的PLI值小于所设阈值时,二值矩阵中对应元素的值为0。通常二值矩阵对角线元素为0,这样构建的网络为0-1二值网络。构建的PLI矩阵灰度图与对应的二值矩阵如图3所示,图3(a)、图3(b)、图3(c)分别表示实验前、实验中和实验后的脑网络PLI矩阵与二值矩阵。PLI矩阵灰度图中颜色越浅,表明该节点PLI值越大,节点度越高。二值矩阵图中,深色认为该节点度为0,浅色认为该节点度为1。

图3 实验前、中、后的脑网络PLI矩阵与二值矩阵Fig.3 PLI matrix and binary matrix of brain network before, during and after the experiment
(6) 构建脑功能网络:将所求的PLI矩阵作为构建网络的邻接矩阵,根据邻接矩阵完成脑网络构建,如图4所示。图4通过脑网络地形图的形式展现了脑网络的拓扑结构,不同颜色深浅代表了不同的活跃度,颜色越浅说明脑区域活跃度越高,节点度越高。图4(a)为实验前的状态,网络中所有节点几乎都处于活跃状态;图4(b)为实验过程中,根据受试者脑电信息构建的脑功能网络图,可以看出相对于图4(a),活跃区域减小;图4(c)为实验结束后的脑功能网络图,从图4(c)可以看出,所有区域为深色,表明所有节点区域都处于不活跃状态。

图4 实验前、实验中和实验后的脑功能网络地形图Fig.4 Topographic map of brain function network before, during and after the experiment
4 基于脑网络特征参数的疲劳识别
表征脑网络的特征参数主要有节点度、最短路径长度、直径和聚类系数等。其中度是对节点相互连接统计特性最重要的描述,也反映重要的网络演化特性。度定义为与节点直接相连的边数,也就是构建的脑网络中任一节点与其他节点的连接数。节点的度越大则该节点的连接就越多,节点在网络中的地位就越重要。任一节点度的计算公式为:
(4)
式中:Ki为节点度;i表示当前要计算的节点;j表示其他的节点;hij表征节点i与节点j的连接状态,当节点i与节点j有连接时,hij=1,当节点i与节点j无连接时hij=0;N表示总节点数。实验前、实验中、实验后分别在起点、服务区、终点处采集脑电信号。各个状态每个节点的PLI值计算结果对比如图5所示。图6以直方图的形式直观地给出了实验前、实验中和实验后的各节点的节点度的对比以及变化情况。
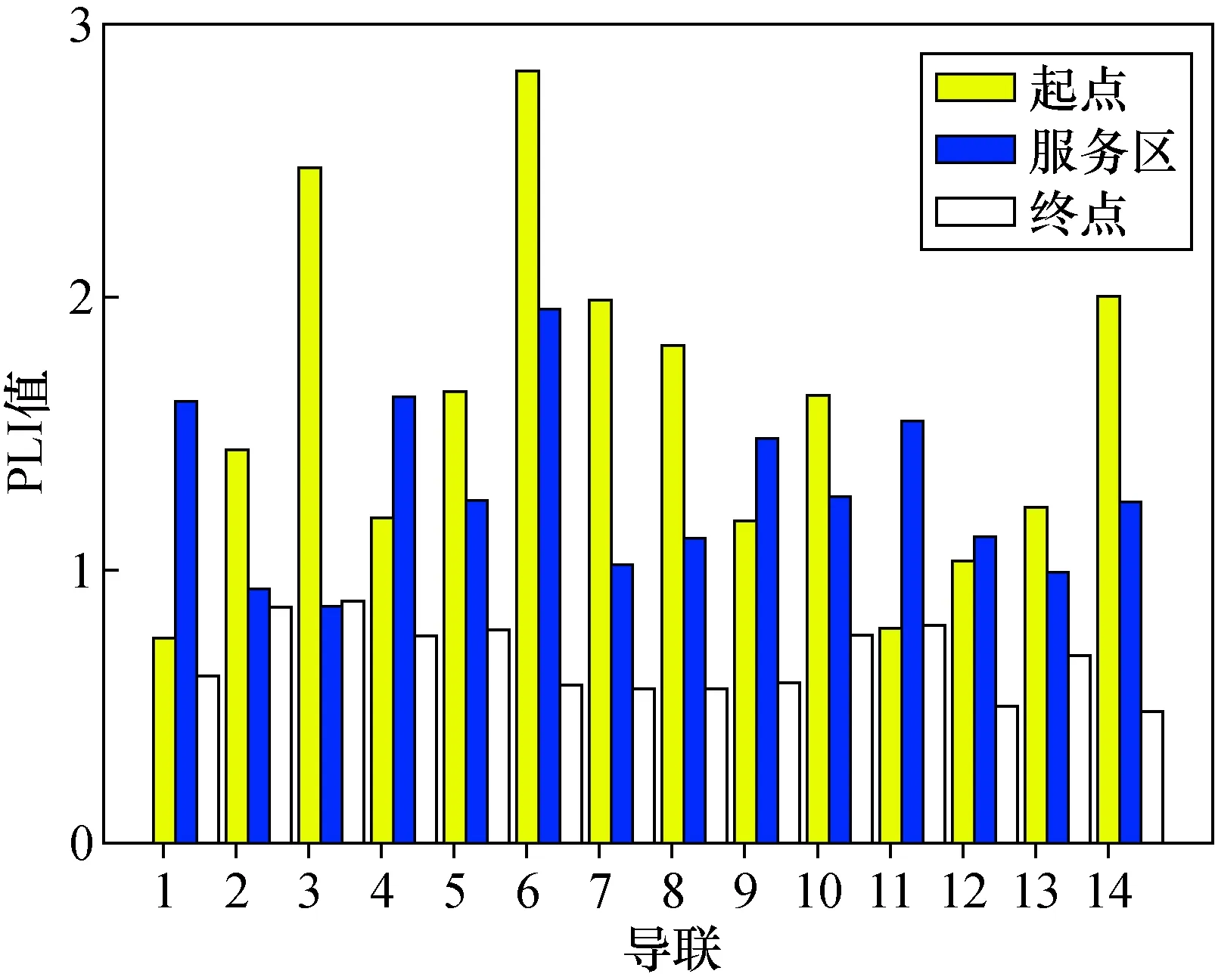
图5 实验前、实验中和实验后的PLI值对比图Fig.5 Comparison of PLI values before, during and after the experiment
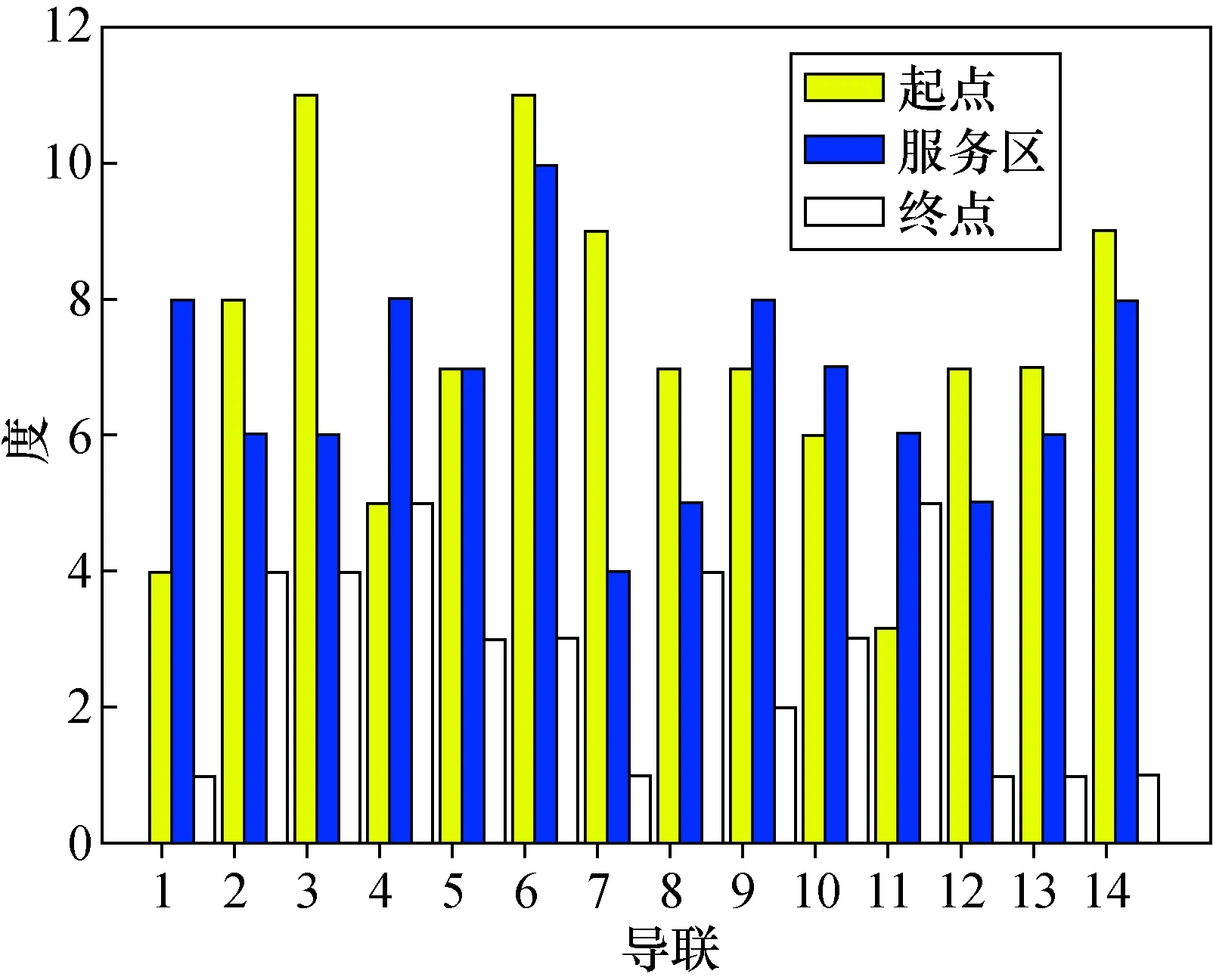
图6 各个节点度的整体对比变化直方图Fig.6 Node degrees before, during and after the experiment
从图3和图4中可以直观地看出,随着驾驶实验的继续,脑网络图中深色区域越来越多,对应的各个节点的度也呈现整体下降的趋势。从图5图6可以看出随着实验的进行,各个节点的PLI值与节点度整体呈现下降趋势。结合驾驶员的主观判断,表明脑功能网络的特征参数——度,能够作为评价驾驶员疲劳的客观指标。
5 讨 论
疲劳驾驶的检测方法主要分为基于车辆行为特征的检测方法、基于驾驶人员行为及面部特征的检测方法与基于驾驶人员生理特征参数的检测方法3大类[16]。
基于车辆行为特征的检测方法大多通过检测车速、方向盘操作、车辆行驶轨迹等物理参数来确定驾驶员是否处于疲劳驾驶状态。这种检测方法借助车载传感器、CCD摄像机等来实现物理参数的检测,其优势在于实现了设备不与驾驶员接触便可进行检测,较为方便,并且避免了设备对驾驶员的影响,但容易受到路况信息、外部光线等因素影响,导致采集结果有很大偏差。
基于驾驶人员行为及面部特征的检测方法则通过摄像头获取驾驶人员眼睛、嘴唇等部位的动作信息,再经图像识别判断驾驶人员是否处于疲劳状态,这种检测方法也能够保证设备与驾驶人员无接触完成信息采集,但也会受到外部光线、天气及驾驶人员自身习惯性姿态等因素的影响,使得采集结果存在偏差。
上述两种方法的固有缺陷在信号采集过程中都难以避免,因此驾驶人员疲劳前后特征差异的不确定性较高,精度较低,可靠性不强。本文采用基于脑电信号的疲劳驾驶检测方法,通过采用设备与驾驶员人体接触的方式来采集驾驶员的脑电信号,信号采集过程中不会因为光线、驾驶员姿态等外部因素影响脑电信号的质量,实验前14个导联的平均节点度为7.14,实验后14个导联的平均节点度为2.71,节点度明显下降。与上述两种方法相比,本文在不同情况下检测结果的指标差异显著,准确性与精度相对较高,可靠性更强。
6 结 论
本文基于真实高速公路驾驶实验,采集了多导脑电数据,详细介绍了邻接矩阵、二值矩阵、脑功能网络的构建以及节点度的计算。基于PLI判别方法建立了二值化的功能脑网络,绘制了脑功能网络地形图,对疲劳过程中网络的拓扑结构进行了研究,采用二值图和脑网络地形图两种功能脑网络从不同角度对驾驶疲劳进行建模分析。结果表明:随着驾驶员疲劳程度的加深,二值化功能脑网络的功能连接随着疲劳的积累逐渐减少,网络的集聚系数减小,全局效率降低。说明随着疲劳的积累,驾驶员大脑的处理能力下降,脑网络的弹性降低,信息的传递速度变慢,处理效率降低,脑功能网络的特征参数——度呈现整体下降的趋势,节点度能够作为客观评价脑疲劳的检测指标。
