嫦娥一号激光高度计在轨月球高程数据测量不确定度研究
2021-12-29王东霞宋爱国温秀兰
王东霞,宋爱国,温秀兰
(1.南京工程学院自动化学院,江苏南京211167;2.东南大学仪器科学与工程学院,江苏南京210096)
1 引 言
月球的形状和地形是理解月球内部结构和表面演化的基础,对测量月球地形是非常重要的[1]。无论早期阿波罗15号至17号宇宙飞船在近赤道轨道有限的区域开展的月球数据测量,还是自1994年至2008年以来人类对月球进行的多次测量研究[2~6],目的都是想要建立产生月球引力场模型和月球地形模型[7~10]。2007年10月24日,承担中国首次月球探测任务的嫦娥一号人造卫星进入了200 km轨道高度的一个极地圆月轨道[11],其搭载的嫦娥一号激光高度计(laser altimeter,LAM),以高精度和高空间分辨率成功地获得了大量的月球全地形的高程科学数据[12]。
由于探月卫星工作在恶劣的空间环境中,不确定的热环境、电磁环境,以及空间高能粒子的轰击、中子辐射、电磁风暴等,不仅会影响探月卫星的控制精度,而且会对探月卫星的各种有效载荷带来明显的测量误差,降低测量的可靠性和测量精度。另外仪器系统噪声、月表地形起伏、卫星轨道与姿态测量等多种因素的影响,会造成激光高度计原始测高数据中不可避免地含有误差。通过系统校正、几何定位和高程解算等得到的科学数据又有可能引入新的处理误差。然而在基于月球探测器机载激光测距器基础上的月球高程测量的不确定度方面的研究鲜见报道,有必要对嫦娥一号探测的月球数据进行误差分析和不确定度研究,为进一步分析误差的来源提供一定的科学依据[13~16]。
2 激光高度计及其科学探测数据
嫦娥一号(CE-1)激光高度计的探测任务是测量卫星到月球表面星下点的距离。激光高度计由中科院上海技术物理研究所开发制造,主要技术性能指标如表1所示。

表1 激光高度计的主要技术性能指标Tab.1 Main technical performance index of Laser Altimeter
嫦娥一号人造卫星在太空飞行持续时间为495 d,所携带的激光高度计共获得了覆盖全月球超过900万有效的2B级月球高程数据,分别存在1 400个文件,共1 400轨。
激光高度计(LAM)获取的1 400轨道探测高程数据,在空间上数据覆盖了全月面[10]。CE-1的激光足印点是在月面沿星下点方向按时间连续排列的一系列散点。CE-1采用极轨圆轨道,轨道高度约为200 km,激光高度计的测距频率为1 Hz,因此激光测高数据沿着星下点轨迹方向(近似于经度线方向)的间距约为1.4 km,垂直轨道方向(近似于纬度线方向)的间距在赤道附近约为17.8 km(CE-1的星下点轨间距约为35.5 km,轨道回归周期为2),并随着纬度的增加而减小,在南北纬60°附近数据间距(纬向)约为3 km,南北纬80°附近数据间距(纬向)达到900 m[10]。
3 激光高度计探测数据选择与处理
3.1 处理区域的选择
月海是月球的主要地形之一,绝大多数分布在月球正面,其分布如图1所示,月球正面的月海面积约占到了月球表面积的50%以上,其中最大的叫风暴洋,面积约5×106km2。

图1 月球月海全图Fig.1 Total graphs of lunar mare
由于月海地势相对平缓,所以选择月海区域的激光高度计高程数据来研究不确定度可最大限度的减少地形变化对月表地形高程探测带来的影响。因此从不同的月海区域中选择相对平坦的区域高程数据作为处理对象。
3.2 所选择区域的数据处理
借助于月球地形图,从某月海区域中选择一些矩形区域进行处理。在这些区域中计算月面高程标准差,通过多次实验验证,将标准差尽可能小的月海平坦区域作为不确定度研究区域。在所选择的区域中,剔除伪高程数据后计算区域高程均值和标准差。在激光高度计高程数据处理时是按照国际大学协会和国际天文联合会(IAU/IAG)建议,月球参考球体半径为1737.4 km。具体处理过程如下:
(1) 在所选择的月海区域中标记出一个矩形区域,从所有的激光高度计的地形高程数据中按照此标记区域的经纬度搜索属于此区域的高程数据。
(2) 在选出的区域中,进行伪高程的剔除、区域高程均值和标准差的计算,具体步骤是:
(1)
式中:N为所选区域中所有高程点数;hi为所选区域的高程数据。
步骤2 计算所选区域中各高程点残差值vi,
(2)
步骤3 计算所选区域高程标准差,
(3)

4 在轨月球高程数据测量不确定度研究
4.1 不确定度来源分析
各个区域标准差的具体差异除与地形特点有一定的关系外,还要结合其他误差来源综合考虑。对于月球高程探测数据的误差来源,文献[9]中提出考虑激光高度计测距误差、仪器安装测量误差、时间测量误差、姿态测量误差及轨道测量误差来源。文献[7]给出了月面高程计算中主要的误差来源及其影响值,考虑了激光高度计测距误差、轨道姿态误差以及由月面光斑点大小带来的高程误差,各个误差分量彼此独立。
综合文献[7,9]提出的误差来源及影响值,在高程数据测量不确定度评定时,考虑主要误差来源及概率密度分布如表2所示,各个误差分量相互独立。
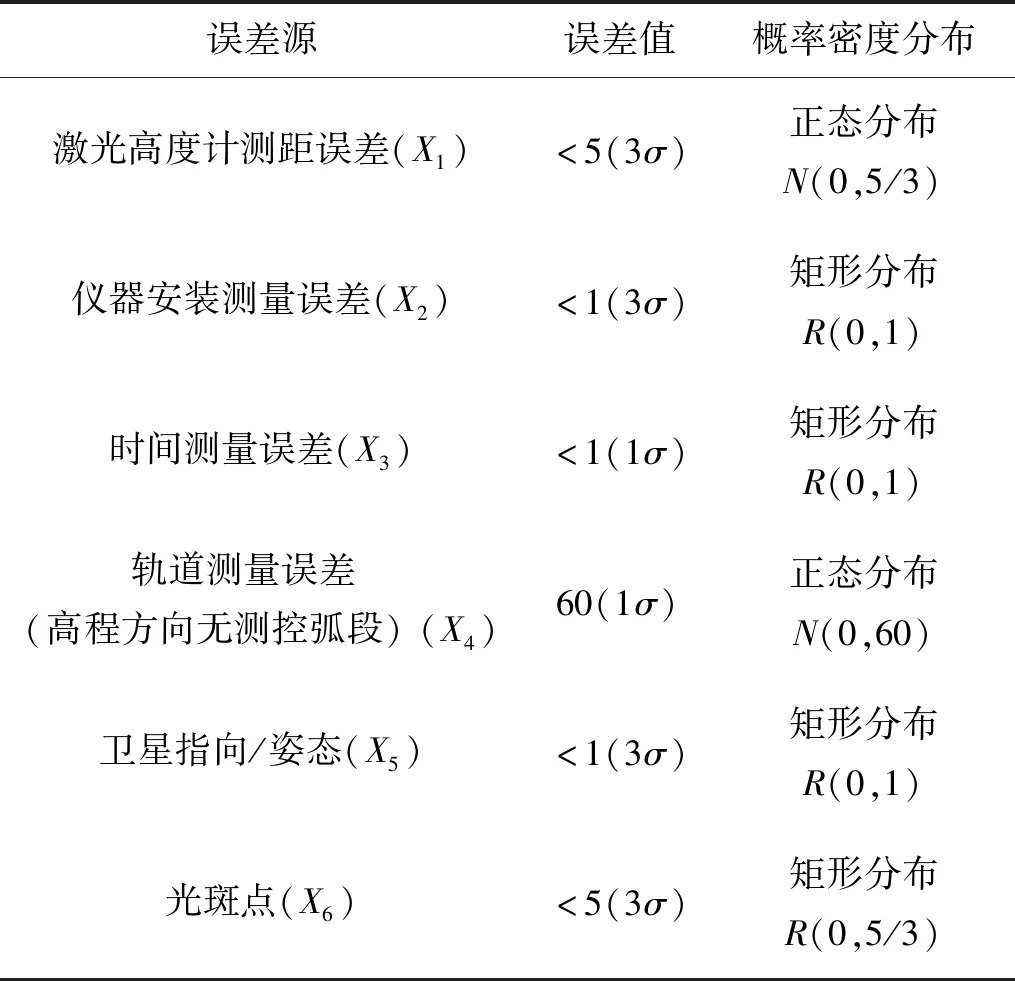
表2 主要误差源及概率密度分布Tab.2 Main error sources and probability density distribution m
4.2 不确定度评定过程
MCM不确定度评定是通过对输入量Xi的PDF离散采样,由测量模型传播输入量的分布,计算获得输出量的PDF离散采样值,进而由输出量的离散分布数值直接获取输出量的最佳估计值、标准不确定度和包含区间[17]。具体方法如下:
(1) 将第4.1节中高程测量的各种不确定来源作为输入量,所选区域高程H作为输出量,建立星载激光高度计月球高程测量不确定度数学模型,所选区域高程H与各输入量之间的关系为:
H=X1+X2+X3+X4+X5+X6+X7
(4)

(2) 选择蒙特卡洛试验样本量的大小M,合理选择蒙特卡洛试验次数即样本量的大小M,也就是测量模型计算的次数,M=106。
(3) 从输入量Xi的概率密度函数中抽取M个样本值xir,i=1,2,…7,r=1,2,…,M,对每个样本矢量(x1r,x2r,…,x7r)计算相应的H的模型值h。
(4) 将M个模型值按严格递增次序排序,这些排序的模型值得到输出量H的PDF离散表示G。

(5)
(6)
(6) 由G计算在给定包含概率p时的H的包含区间[h(low),h(high)]。
若pM为整数,设q=pM;否则取q的值为pM+1/2的整数部分。若(M-q)/2是整数,取r=(M-q)/2;否则,取r等于r=(M-q+1)/2的整数部分,可得概率对称100p%包含区间[h(r),h(r+q)]。
4.3 不确定度评定结果
以面积较大的澄海和风暴洋为例,从中选出两个区域进行高程不确定度评定,说明月海区域高程数据测量不确定度评定过程。
如图2所示的黄色区域1,是通过多次实验自澄海中选出的地势较为平坦的一矩形区域,区域1面积10 193.23 km2,位于月球经度13.85~17.48°、纬度24.96~28.03°的位置。
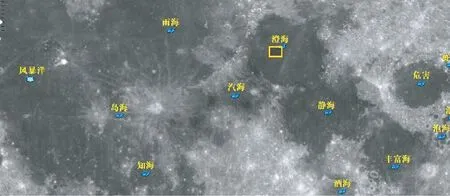
图2 区域1(澄海部分区域)的位置分布图Fig.2 Distribution map of region 1 from Mare Serenitatis
如图3所示的黄色区域2,是通过多次实验自风暴洋中选出的地势较为平坦的一矩形区域,区域2面积13 121.11 km2,位于月球经度-60.73°~-56.86°、纬度18.28°~22.03°的位置。
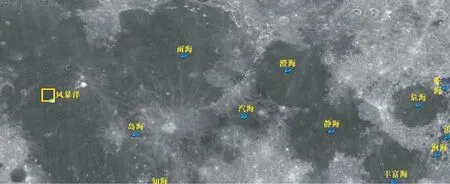
图3 区域2(风暴洋部分区域)的位置分布图Fig.3 Distribution map of region 2 from Oceanus Procellarum
两个黄色区域的高程数据剔除伪高程数据前后的数据分布情况如图4和图5所示,区域1的高程测量数据点数分别为1 519点和1 511点,区域2的高程数据点数分别为1 907点和1 903点。
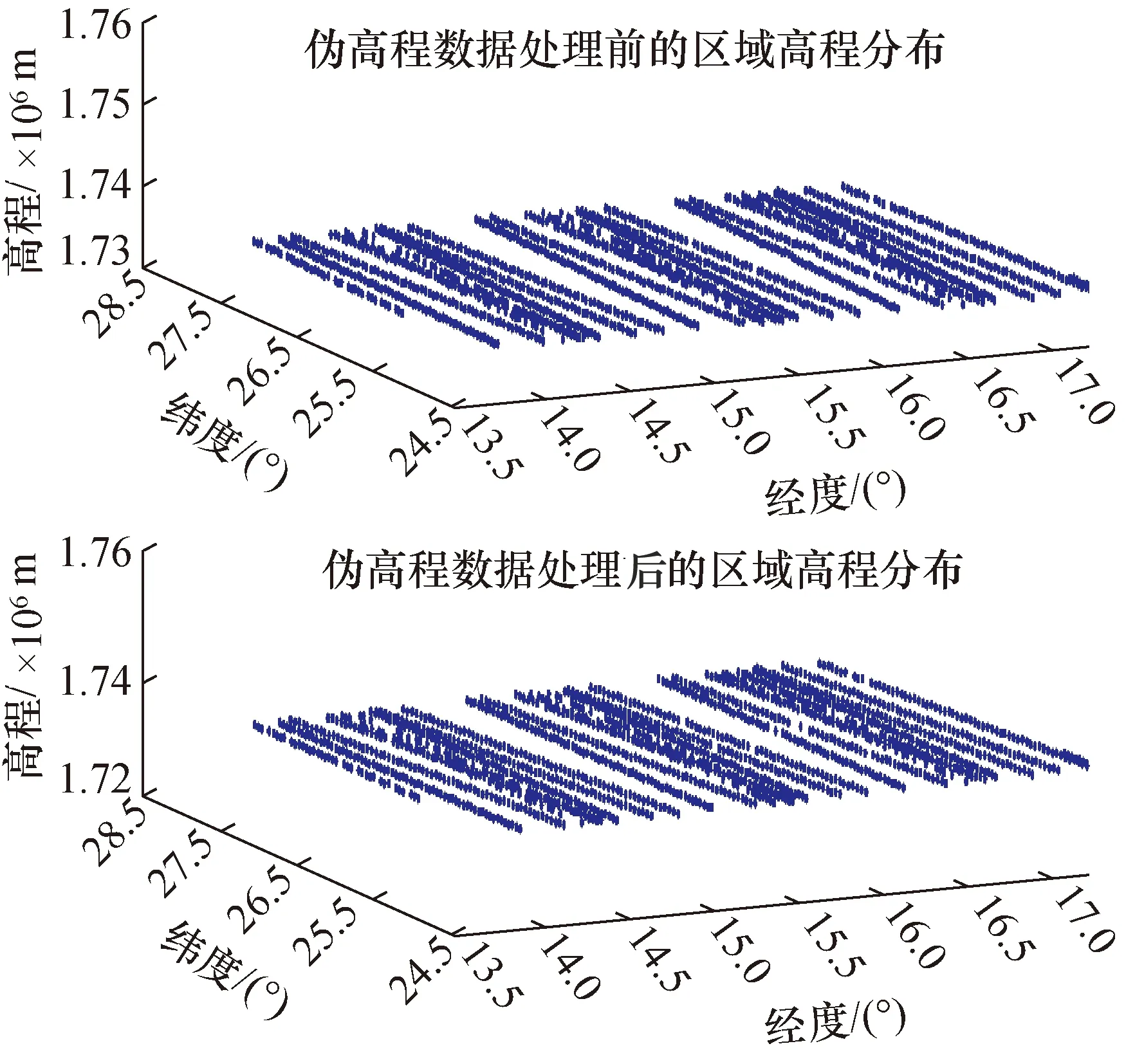
图4 区域1(澄海部分区域)伪高程去除前后高程分布Fig.4 Region 1 evaluation distribution before and after removing pseudo evaluation

图5 区域2(风暴洋部分区域)伪高程去除前后高程分布Fig.5 Region 2 evaluation distribution before and after removing pseudo evaluation
MCM和GUM评定结果列于表3,可见MCM评定结果与GUM结果相差甚微,可认为基本一致。

表3 区域1和区域2的两种评定结果Tab.3 Two assessment results for region 1 and 2 m

剔除伪高程数据后的区域1和区域2的高程标准差分别为52.62 m和39.54 m。这两个区域处理后高程较处理前并未有太大改变。区域1的澄海区域去掉了8个伪高程点,区域2去除了4个伪高程点,只是去除了个别异常高程点,仍然能够反映这2个区域的实际高程地形。从标准差的结果来看,澄海区域1的地形变化较风暴洋区域2的地形明显,区域2的地形较平坦。
图6给出MCM不确定度框架下月面高程输出量H的频率分布直方图,并以垂线形式给出了2种方法95%置信概率下的包含区间的上下限端点。

图6 区域1和2的MCM高程误差概率分布Fig.6 MCM elevation error probability distribution in regions 1 and 2
除了澄海和风暴洋之外,其他月海地区也用同样的方法进行了处理,处理的月海区域选择如图7中所标示。因为处理过程中不确定度来源相同,所以区域高程的标准差起决定性作用。其他几个月海区域的高程数据处理如表4所示。
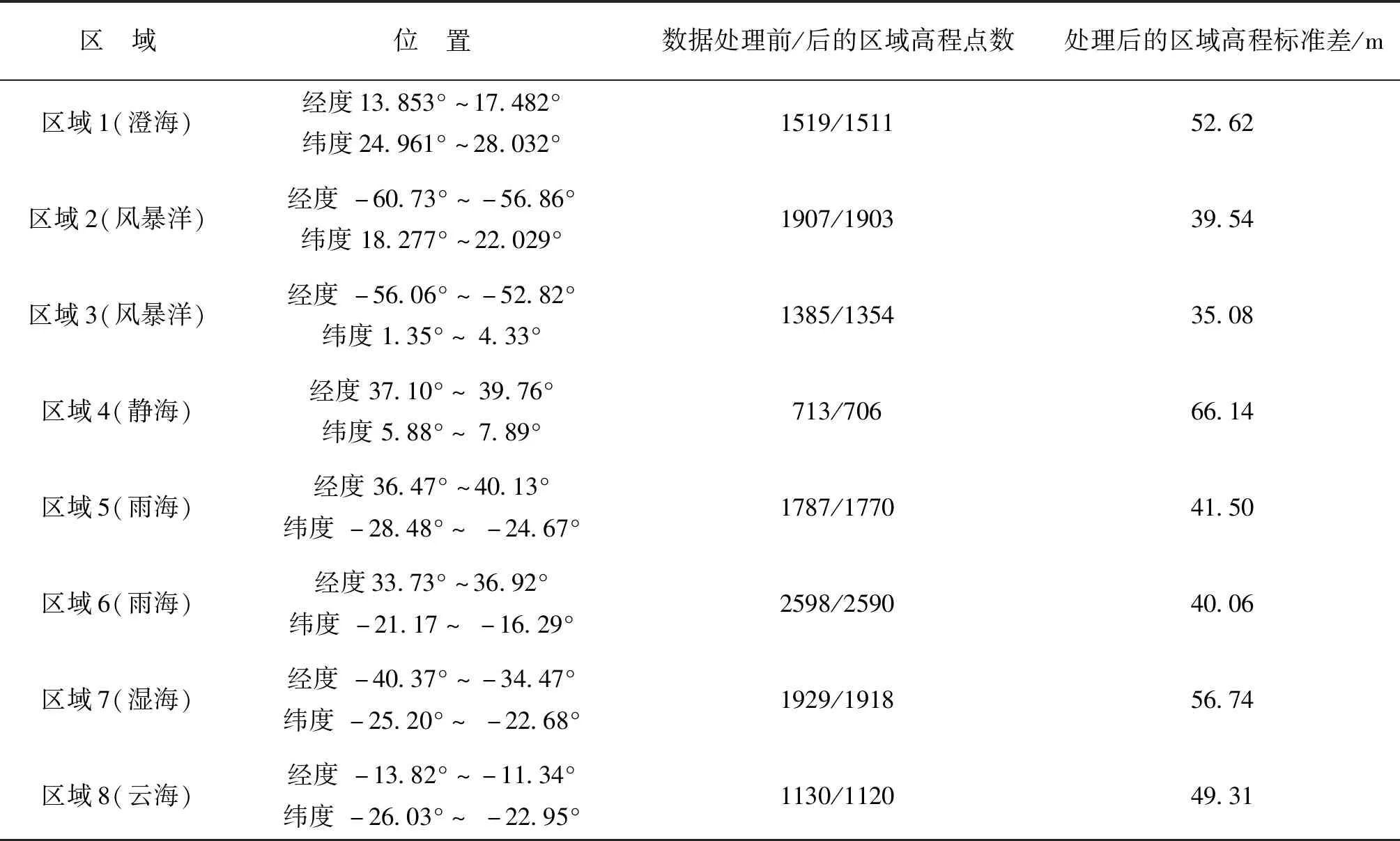
表4 所选月海区域处理结果Tab.4 Results of selected lunar mare regions
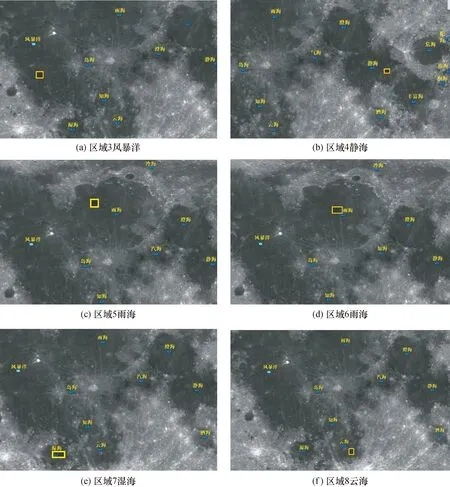
图7 其他月海区域Fig.7 Other lunar mare regions
从表4中的数据可以看出:标准差小的月海区域是高程变化较平缓地带,即图7月球地图中灰度变化不明显区域。文中所处理的8个区域中,高程点去除最少的是区域2(风暴洋),共计4个点,最多的是区域3(风暴洋),共计31个点;区域3中可能存在异常低洼或突出的特殊地形,才导致这些点的数据异常而被处理掉。剩下的1 354点高程数据分布较平坦,高程标准差35.08 m比区域2的39.54 m要小。其他几个区域处理掉的高程点较少,基本能反映所选择月海区域的地形激光高程测量情况,是所选月海中较平缓区域。
5 结 论
从嫦娥一号激光高度计在轨月球高程数据测量不确定度评定过程及结果可以看出:月海地形特征的影响和卫星轨道测量误差起着非常重要的作用。在激光高度计高程探测的不确定度研究中,一方面需要考虑月海地形变化带来的误差,另一方面可以考虑新的方法或者更合适的去伪高程算法的应用,处理结果也可以和后续月球高程激光高度计的探测结果进行对比研究,以便有更多和更新的对月球及空间环境的发现。
