复合式罩极电机扭转振动检测与分析
2021-12-29周丰,赵浩
周 丰,赵 浩
(1. 嘉兴南湖学院 信息工程学院,浙江 嘉兴 314001; 2. 嘉兴学院 信息科学与工程学院,浙江 嘉兴 314001)
1 引 言
罩极电机具有结构简单、价格低廉、运行可靠等优点,在家用电器、小型电动工具中得到广泛应用[1],学者们从多个角度对罩极电机进行了分析和研究。Vasilija Sarac采用有限元法对罩极电机内部复杂的电磁过程进行了计算和仿真[2];Shamlou S对一种永磁同步罩极电动机进行了设计、优化和分析[3],并采用有限元软件和遗传算法对电机的效率、功率因数和起动性能进行了计算和优化[4];Collins W D等建立了罩极式电动机的数学模型,对重要的无量纲电参数和机械参数进行了定义[5];黄开平对隐极式罩极电动机的绕组排布方式进行了研究,打破常规单极闭合或2个单极串联闭合的副绕组方式,采用链式大跨距副绕组结构[6];胡彦奎对一种采用辅助绕组和移相电路的罩极式电机的动态性能进行了分析[7];王洪坤等提出一种双转向罩极式异步电机的实现方法,并对双转向罩极式异步电动机在运行过程中的损耗、功率、转矩进行了试验和分析[8];张晃清等利用电磁有限元计算软件对一种单相四极罩极电机进行二维、三维瞬态性能仿真[9]。
本文研制了一种新型复合式罩极电机,与普通罩极电机相比,复合式罩极电机的左、右转子产生2个扭转振动波,振动波的相位差为励磁电压相位差的2倍,且近似为正弦波形,扭振叠加基本符合矢量运算法则,因此可以通过改变励磁电压的相位差调节电机扭振幅值的大小。
2 复合式罩极电机
2.1 机械结构
设计的复合式罩极电机结构如图1所示,包括左端盖1、轴承2、机壳3、左定子铁心4、左定子绕组6、右定子铁心7、右定子绕组9、左转子铁心5、左转子绕组13、右转子铁心8、右转子绕组14、右端盖10、轴承11和转轴12。
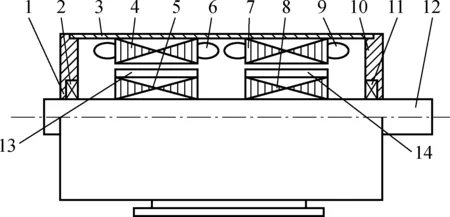
图1 新型复合式罩极电机结构图Fig.1 Compound shaded-pole motor structure diagram
转轴通过左、右轴承与左、右端盖固定,再与机座固定,转子可相对机座转动;转子同心外设左、右定子铁心,左、右定子铁心极靴处一边开有凹槽,槽内嵌入短路铜环,如剖面图2所示;且左、右两段定子铁心的中线在空间上位置重合,左、右两段定子绕组分别绕置在左、右两段定子铁心上;左、右两段定子绕组的位置在空间上位置重合。

图2 复合式罩极电机剖面图Fig.2 Compound shaded-pole motor sectional view
2.2 气隙旋转磁场

(1)
式中:ω为定子绕组通入交流电的角频率;Φ1m为磁通Φ1(t)的幅值,Φ2m为磁通Φ2(t)的幅值,Φ2m>Φ1m。
根据旋转磁场的合成理论,电机气隙内将合成一个椭圆旋转磁场。根据文献[10]中的推导过程可知,罩极电机气隙中的椭圆旋转磁场转速为:
(2)


(3)
2.3 电磁转矩
罩极电机定子绕组通电产生旋转磁场后,旋转磁场与转子存在相对切割,假设转子的角速度为ωr(t),则旋转磁场与转子的相对角速度为:
Δω(t)=β(t)-ωr(t)=
(4)
根据法拉第电磁感应定律,转子导条产生的切割电动势为:
er(t)=CfΦ(t)·Δω(t)
(5)
式中Cf为与电机结构相关的常数。假设转子的电阻为R,忽略转子的电抗,则转子电流为:
(6)
则转子的电磁转矩为:

(7)
200π-(sin2ωt+4cos2ωt)×48π=
80π-72π×cos2ωt
式(7)对应的仿真波形如图3所示,由此可知,罩极电机运行时电磁转矩存在恒定分量和波动分量,其中波动分量导致电机运行时存在扭转振动,且频率为通电频率的2倍,即100 Hz。
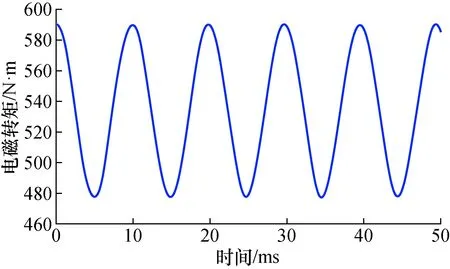
图3 罩极电机左转子产生电磁转矩波形Fig.3 The electromagnetic torque waveform of left rotor
式(7)中的电磁转矩为罩极电机左定子绕组对左转子产生的驱动力矩,右定子绕组通电时,右转子也会产生类似的式(7)的电磁转矩。
3 罩极电机扭振检测实验
3.1 实验系统
罩极电机扭振检测实验系统如图4所示,包括试验台底座、新型复合式罩极电动机、旋转角加速度传感器[10,12]和机械负载。此外,还包括配套的刚性联轴器、数字存储示波器和电源系统。机械负载由直流发电机及负载电阻构成;电源系统由2组三相交流电源构成,用于产生错开一定相位角,但幅值相同的交流电压。
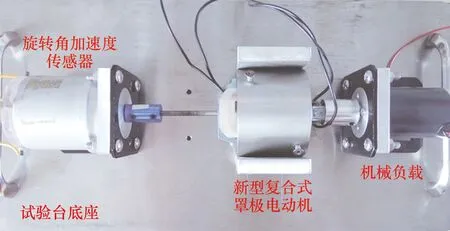
图4 新型复合式罩极电机扭转振动检测实验平台Fig.4 Torsional vibration testing platform of compound shaded-pole motor
3.2 实验结果
按照图4所示搭建实验系统。
实验1:复合式罩极电机左定子绕组通电,将机械负载与可调电阻连接,调节电阻值至罩极电机工作在额定状态,此时系统转速为2 200 r/min,对应的旋转角加速度波形及频谱如图5所示。由此可知,罩极电机负载运行时,扭转振动基波分量频率为100 Hz,验证了式(7)的正确性,且对应的传感器输出电压幅值为50.06 mV。
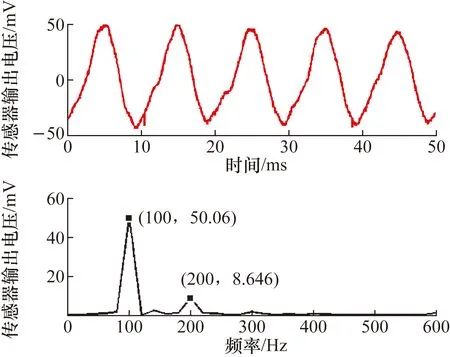
图5 新型复合式罩极电机单相绕组通电时的扭转振动Fig.5 Compound shaded-pole motor torsional vibration when single phase winding electrified
实验2: 复合式罩极电机左、右定子绕组通电,电压相位相同,调节负载至电机工作在额定状态,此时系统的扭转振动波形以及对应的频谱如图6所示。可知复合式罩极电机扭转振动对应的传感器输出电压频率为100 Hz,幅值为105.1 mV,约为单个绕组通电运行时电机扭振对应电压幅值的2倍。

图6 电压相位相同时电机扭转振动波形及频谱Fig.6 Torsional vibration waveform and frequency spectrum of compound motor when the voltages are same phase
实验3: 复合式罩极电动机左、右定子绕组通电,电压相位错开180°,调节负载至电机工作在额定状态,此时系统的扭转振动波形以及对应的频谱如图7所示。可知电机扭转振动对应的传感器输出电压频率为100 Hz,幅值为103.6 mV,约为单个绕组通电运行时电机扭振对应电压幅值的2倍。

图7 电压错开180°相位时的电机扭转振动波形及频谱Fig.7 Torsional vibration waveform and frequency spectrum of compound motor when the voltage phase is 180°
实验4: 新结构罩极电动机左、右定子绕组通电,电压相位错开30°,调节负载至电机工作在额定状态,此时系统的扭转振动波形以及对应的频谱如图8所示。可知电机扭转振动造成的传感器输出电压频率为100 Hz,幅值为92.78 mV,约为单个绕组通电运行时电机扭振对应电压幅值的1.85倍。
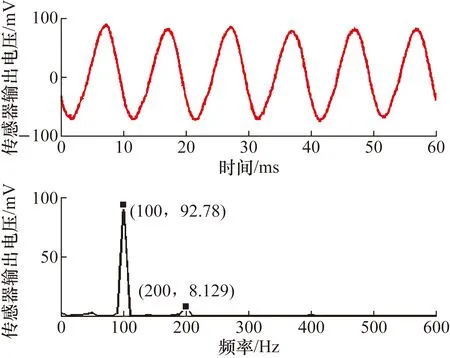
图8 电压错开30°相位时的电机扭转振动波形及频谱Fig.8 Torsional vibration waveform and frequency spectrum of compound motor when the voltage phase is 30°
实验5: 新结构罩极电动机左、右定子绕组通电,电压相位错开150°,调节负载至电机工作在额定状态,此时系统的扭转振动波形以及对应的频谱如图9所示。可知电机扭转振动对应的传感器输出电压频率为100 Hz,幅值为94.25 mV,约为单个绕组通电运行时电机扭振对应电压幅值的1.88倍。
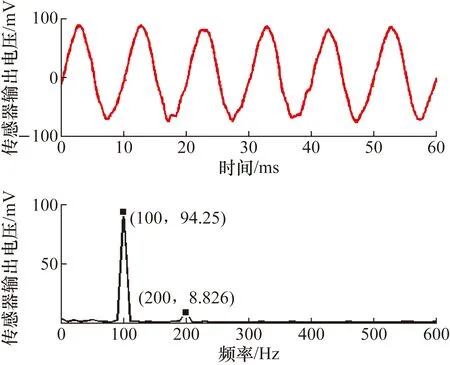
图9 电压错开150°时的电机扭转振动波形及频谱Fig.9 Torsional vibration waveform and frequency spectrum of compound motor when the voltage phase is 150°
实验6: 新结构罩极电动机左、右定子绕组通电,电压相位错开60°,调节负载至电机工作在额定状态,此时系统的扭转振动波形以及对应的频谱如图10所示。可知电机扭转振动对应的传感器输出电压频率为100 Hz,幅值为48.5 mV,与单个绕组通电运行时电机扭振对应电压幅值近似相同。
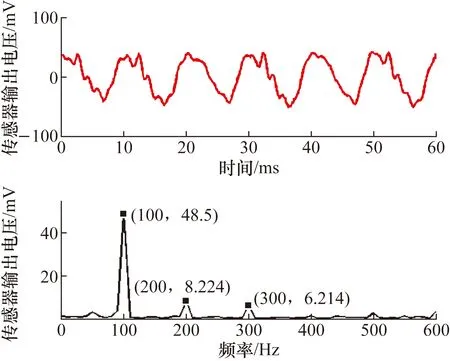
图10 电压错开60°相位时的电机扭转振动波形及频谱Fig.10 Torsional vibration waveform and frequency spectrum of compound motor when the voltage phase is 60°
实验7: 复合式罩极电动机左、右定子绕组通电,电压相位错开120°,调节负载至电机工作在额定状态,此时系统的扭转振动波形以及对应的频谱如图11所示。可知电机扭转振动对应的传感器输出电压频率为100 Hz,幅值为46.47 mV,与单个绕组通电运行时电机扭振对应电压幅值近似相同。
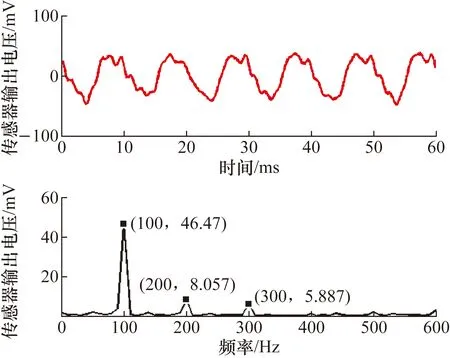
图11 电压错开120°相位时的电机扭转振动波形及频谱Fig.11 Torsional vibration waveform and frequency spectrum of compound motor when the voltage phase is 120°
实验8: 复合式罩极电机左、右定子绕组通电,电压相位错开90°,调节负载至电机工作在额定状态,此时系统的扭转振动波形以及对应的频谱如图12所示。可知100 Hz的扭转振动对应电压幅值近似为零。
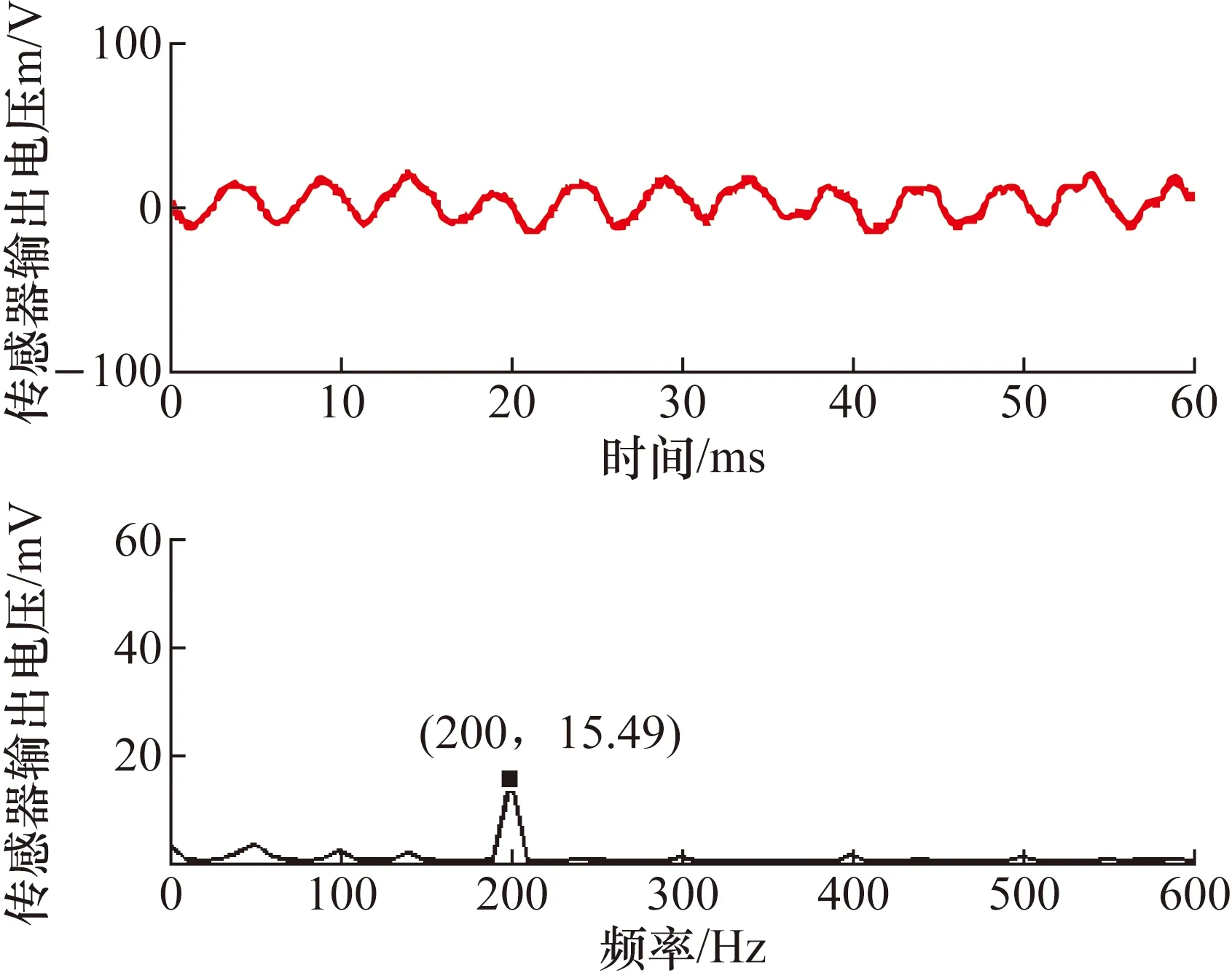
图12 电压错开90°相位时电机扭转振动波形及频谱Fig.12 Torsional vibration waveform and frequency spectrum of compound motor when the voltage phase is 90°
3.3 实验结果分析
1) 根据实验1至实验7的实验结果可知,罩极电机运行时,扭转振动频率为100 Hz,但存在部分畸变。原因是:定子绕组电压存在少量高频谐波,会产生相应的电磁转矩波动分量;气隙磁场与转子绕组作用时,除了产生电磁驱动转矩,还会导致齿槽转矩的存在。
2) 电机两相绕组通电时,根据实验2至实验8的实验结果可知,改变左、右定子绕组电压的相位差,电机的扭转振动幅值不同,具体情况如表1所示。

表1 电机扭振幅值与励磁电压相位差对应关系Tab.1 The motor torsional amplitude corresponds to the excitation voltage phase difference
根据变压器绕组电压与其产生的气隙磁通满足关系式:

(8)

当左、右定子绕组的电压存在相位差α时,根据上述过程可知,左、右气隙磁场对左、右2个转子产生的电磁转矩波动分量相位差为2α,即扭转振动波的相位差为左、右定子绕组电压相位差的2倍。
假设扭转振动波为标准正弦规律变化,根据相量叠加原则:
1) 当左、右定子绕组电压相位差为0°和180°时,左、右定子绕组驱动转子产生的2个扭转振动波相位相同,叠加后幅值为单个绕组驱动单个转子产生的扭转振动波幅值的2倍;

3) 当左、右定子绕组电压相位差为60°和120°时,左、右定子绕组驱动转子产生的2个扭转振动波相位错开120°,叠加后幅值与单个绕组驱动单个转子产生的扭转振动波幅值相同;
4) 当左、右定子绕组电压相位差为90°时,左、右定子绕组驱动转子产生的2个扭转振动波相位错开180°,叠加后振动波的幅值为零。
由于电机的扭转振动波存在少量畸变,导致表1的实验数据与理论值略有差异。
4 结 论
本文设计了一种复合式罩极电机,采用双定子双转子机构,推导了电机的电磁转矩表达式,制作了电机样机,对不同工况下电机的扭振进行了检测,通过理论分析找到了电机扭振幅值变化的原因。实验结果表明,当电机左、右绕组通电相位差为90°时,电机的扭振基波分量幅值近似为零,可以有效消减电机运行时的扭转振动。
