基于Volterra模型的浮式风机运动响应预测研究
2021-12-29刘丽丽高树健刘俊伟刘福顺
刘丽丽,高树健,刘俊伟,刘福顺,*
(1.中国海洋大学 山东省海洋工程重点实验室,青岛 266100; 2.青岛理工大学 土木工程学院,青岛 266525)
结构安全是工程建设的关键问题,结构动力响应是评价的重要依据。在海洋工程领域,浮式结构是一种具有显著非线性行为的系统,其动力响应分析相对复杂。目前,数值模拟[1]已经成为了非线性动力响应分析的重要手段。李焱等[2]用有限元建立了浮式风机的动力学模型并考虑了系泊缆的几何非线性,发现考虑几何非线性的系泊缆响应幅值会被放大。BROWNING J R等[3]将FAST风机模型与同一条件下的水槽试验结果进行对比,发现FAST模型与水槽试验模型的阻尼特性存在显著差异。为了克服模拟计算存在模型不确定性以及计算量大、耗时长等问题,有关研究人员尝试从系统识别角度开发代替算法,DONG Yinfeng等[4]采用支持向量机(SVM)对框架结构的非线性动力学行为进行了建模,成功预测了结构响应,但算法需要大量的包含有效信息的数据支撑训练。UDDIN A M等[5]采用人工神经网络对Spar系泊缆的动力响应进行了预测和仿真验证,证明神经网络是一种有效的预测方法,但仍存在预测步数越多就越不准确、并且需要大量的训练样本才能达到可靠的精度等缺点。无论有限元、SVM还是神经网络均是一个复杂且耗时的过程。
近年来,有关学者采用基于Volterra模型的响应预报算法优化了预报算法,只需要较少的训练样本就能快速收敛,同时能够保证预报精度,支持实时在线处理数据,可以用于模拟时变线性系统和一般非线性系统并输出预测,并且该模型考虑了线性项和非线性项,更接近系统实际情况。KIM N[6]采用频域Volterra模型对张力腿平台进行了建模,模型很好地模拟了TLP的波高与纵荡运动之间的非线性关系,然而频域Volterra模型采用谱估计算法,不可避免地会引入偏差。梁存峰[7]采用时域Volterra模型进行洪水预报,预报整体平均相对误差为8.97%。他们的研究均证明Volterra模型能很好地适用于一般非线性系统,对其输出数据具有追踪预报的能力。因此,本文应用时域Volterra模型建立浮式风机波浪和响应数据的非线性模型,并结合Kalman滤波和平滑算法获得模型参数最优估计,进而实现了浮式风机动力响应的预测,通过与实际结果对比,验证了本文算法的有效性和实用性。
1 Volterra模型在状态空间中的描述
Volterra模型[8-9]描述的系统输入x(n)与输出y(n)之间的关系,通常用x(n)的级数表示为
(1)

在实际工程应用中,往往利用前2阶截断的形式表征系统,即
(2)
式(2)利用系统输入将系统输出表达成常数项、线性项和非线性项的和的形式。当系统输出仅由系统输入引起时,在计算过程中可以舍弃常数项y0。非线性项的回归量和核函数关于(M-1,M-1)具有对称性,计算过程可以只取矩阵的上半三角形部分,从而将式(2)简化为向量形式,即
(3)
式(3)中右边第1项是包含系统历史输入的回归量,第2项是回归量所对应的核系数。其中,线性部分的核系数的个数等于M,非线性部分的核系数的个数等于M(1+M)/2,总的核系数个数等于M+M(1+M)/2。为了方便估计过程,将式(3)简写为
y(n)=φT(n)θ(n)
(4)
式中:φT(n)为系统回归量,由系统历史输入组成;θ(n)为系统核系数,包含了系统的信息。
使用递归方式对核系数进行估计时,假定核系数随机变化,状态转移方式可以采用随机游走模型,模型误差记为w(n),则状态方程见式(5)。测量噪声记为υ(n),该系统的测量方程见式(6)。
θ(n)=Aθ(n-1)+w(n)
(5)
y(n)=φT(n)θ(n)+υ(n)
(6)
式中:θ(n)为n时刻的状态向量;A为状态向量θ(n)从时间步n-1到时间步n的状态转移矩阵;w(n)为零均值高斯随机过程噪声,且方差为q,相关矩阵可表示为Q=qI;υ(n)为零均值高斯随机过程的测量噪声,其中方差记为R。过程噪声与测量噪声相互独立。
2 基于Volterra模型的运动响应预测
2.1 滤波过程

θ(n|n-1)=Aθ(n-1|n-1)
(7)
C(n|n-1)=AC(n-1|n-1)AT+Q
(8)
式中:θ(n|n-1)为由时间步n-1到时间步n得到的状态参数的预测量;C(n|n-1)为误差相关矩阵。
实现测量更新阶段的一个重要因子是Kalman增益G,其为L×1向量,表示为
G(n)=C(n|n-1)φT(n)[φ(n)C(n|n-1)φT(n)+R]-1
(9)
测量更新阶段将用于纠正θ(n|n-1)在时间更新阶段的误差,可以表示为
θ(n|n)=θ(n|n-1)+G(n)[y(n)-φT(n)θ(n|n-1)]
(10)
C(n|n)=[1-G(n)φ(n)]C(n|n-1)
(11)
式中:y(n)-φT(n)θ(n|n-1)为新息过程,为状态更新提供了新的信息。
通过建立系统输入和输出的非线性多项式模型,并结合系统状态方程和测量方程,从而实现了系统的最优输出估计。
2.2 平滑过程
滤波过程是从时间步n=1到时间步n=N向前估计的,会不可避免地出现迟滞误差。可以选择从时间步n=N-1到时间步n=1向后的方式平滑补偿,降低估计过程的误差。平滑矩阵T(n)表示为
T(n)=C(n|n)ATC(n+1|n)-1
(12)
将平滑矩阵应用到状态矩阵和协方差矩阵中进行平滑,平滑方程为
θ(n|N)=θ(n|n)+T(n)[θ(n+1|N)-θ(n+1|n)]
(13)
C(n|N)=C(n|n)+T(n)[θ(n+1|N)-θ(n+1|n)]TT(n)
(14)
2.3 预测过程
(15)
3 数值算例
根据非线性模型理论,可以将一个已知参数的非线性多项式模型可以表示为
y(n)=ax(n)+bx(n-1)+cx(n-2)+dx(n-3)+ex(n-4)+fx(n)2+
gx(n)x(n-1)+hx(n)x(n-2)
(16)
令a=0.32,b=1.43,c=-0.25,d=1.8,e=0.45,f=0.7,g=0.62,h=-1.2。
由该多项式的形式可知,该多项式是非线性模型的截断形式,输出包括1个线性项和1个非线性项。输入频率为0~0.5 Hz的随机序列,输出按式(16)计算,输入输出如图1(a)(b)所示。

图1 系统输入输出信号及预测值与真实值对比
使用前2500 s数据建立输入输出的Volterra模型,设置非线性度为2,记忆深度为5。利用Kalman滤波估计出模型系数,并用模型系数预测2500~3000 s的模型线性项与非线性项输出,并与真实值对比,如图1(c)—(e)所示。由图可知,该方法可以准确地预测出非线性模型输出的线性项和非线性项,并重构出非线性模型的整体输出信号。
4 浮式风机仿真算例
为了进一步验证算法,使用该算法对如图2(a)所示的5MW OC3 Hywind Spar浮式风机平台响应时间序列进行多步预测。将水动力软件AQWA计算的水动力数据导入动力学分析软件Orcaflex中进行计算,有义波高4.6 m、跨零周期6.6 s的计算工况下,得到了1阶、2阶波浪力下的浮式风机平台的动力响应数据。浮式风机平台的波浪数据、纵荡和横荡响应如图2(b)—(d)所示。

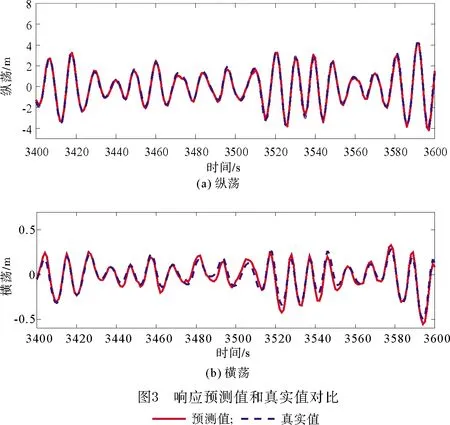
图2 风机模型及波浪与运动响应时程
首先,构建波浪和响应之间的Volterra模型,设置非线性度为2,记忆深度为30。然后选择合适的误差协方差矩阵驱动Kalman滤波估计过程,最后对后续波浪进行相空间重构,进而实现了浮式风机运动响应时间序列的多步预测。数据的前段(0~3400 s)作为训练样本,数据的后段(3400~3600 s)作为预测样本用于验证预测效果的参考值。预测值与实际值对比结果如图3所示,图中显示,无论是纵荡还是横荡,响应预测结果与响应实际结果都较为吻合,无明显迟滞和偏差现象。
为了进一步量化误差情况,引入单步误差E、偏离度D及均方误差值ERSM对预测结果误差进行量化。单步误差反应了单步预测值与真实值之间的差值,偏离度反应了单步预测值与真实值之间的偏离程度,均方根误差反应了到目前步所有预测值与真实值之间的平均误差。单步误差E、偏离度D和均方误差值ERSM可由式(17)—式(19)计算得出,结果详见表1。

表1 预测误差统计

(17)
D=E/y(n)
(18)
(19)
由表1可得出,横荡响应预测值的单步误差和均方根误差都小于纵荡响应的误差,说明横荡响应预测值的绝对误差较小,但横荡响应预测值与真实值的偏离度整体大于纵荡响应的偏离度,说明了横荡响应的预测值的相对误差较大。因此,纵荡响应的预测精度比横荡响应的预测值精度更高,这与图3中可得出的结论相一致。以上分析表明,时域Volterra模型能够对浮式风机动力响应建模。该算法能有效地进行响应多步预报,预报误差没有随着步数增大而逐渐增大,很好地预测了浮式风机的非线性动力响应。
在浮式风机整体运动响应中,包含了线性项和非线性项,运用该算法提取了运动响应的线性项和非线性项,以纵荡响应为例进行提取研究,提取成分与总响应对比如图4和图5所示。图4是训练数据的成分提取对比,图5是预测数据的成分提取对比。由图4和图5可知,在该风机仿真试验中,线性项是纵荡响应的主要成分,非线性项占据次要地位。线性项主导了浮式风机的纵荡动力响应行为,非线性项追踪了纵荡响应的峰值,说明线性项与非线性项都是不可忽略的,它们通过互相制约调节形成了整体的运动响应,具有线性和非线性动力学的综合表现。

图4 响应成分与总响应对比

图5 预测响应成分与总响应对比
5 结论
本研究以海洋工程领域的浮式风机为研究对象,应用Volterra模型对该类非线性系统建模,并成功利用Kalman滤波估计出了模型系数,然后使用模型系数预测了浮式风机平台动力响应,重构出了响应的线性成分和非线性成分。通过研究得出了以下结论:
1) 浮式结构通过二阶Volterra模型已充分建模,对超过二阶的非线性系统的建模可以采取较高的阶次,建模过程相对简单,但估计状态参数数量增多而增加了计算量。
2) 纵荡响应和横荡响应预测值与真实值吻合较好,预测误差没有随着步数增大而逐渐增大,Volterra模型有效地预测了浮式风机的非线性动力响应。
3) 成功实现了浮式风机运动响应线性项和非线性项的分离,通过分析发现它们互相调节,形成了整体的运动响应,线性项主导了响应行为,非线性项追踪了浮式运动响应的峰值,在响应中起到了不可忽略的作用。
