飞翼无人机着舰横侧向控制律设计
2021-12-27刘光锐陈欣
刘光锐,陈欣
(南京航空航天大学,江苏 南京 210016)
0 引言
飞翼布局无人机拥有气动和结构效率高、升阻比和有效载荷量大、载荷分布均匀以及隐身性能好等优点[1],因而受到了世界各国的广泛关注。目前,这一类无人机在世界范围内尚未投入使用,还处于试验阶段。
对舰载机而言,影响舰载机着舰的因素有海洋、大气和着舰平台等,这些因素导致舰载机的着舰操作异常复杂。据公开资料,美国的X-47B无人机是当前世界上唯一一款成功在航母上自主起降的无人机[2-3],其着舰方式采取人工控制和自适应控制相互结合。飞翼无人机的研究技术属于机密,当前理论界的研究成果甚少。王鑫[4]提出基于多变量模型参考自适应理论的抗干扰飞行控制律,在较快的响应下通过抑制作用保证系统的稳态、瞬态响应各项指标的稳定性。杨恩泉等[5]人指出,基于反馈线性化方法的非线性控制方法需要精确的系统模型,然而这是很难做到的。
在飞翼无人机着舰过程中,对理想着舰点的高度与距离的精确跟踪仍是一大难点。本文首先针对无人机着舰横向控制提出了几点要求,并设计了航向增稳控制律,解决了飞翼无人机着舰横侧向荷兰滚模态不稳定的问题;其次基于自适应动态逆理论设计了滚转角控制律,使滚转角控制变得准确、稳定;最后设计了以航迹角控制器和侧向速度控制器,实现了平动轨迹的精确跟踪,同时在每个控制器设计后都对控制器的响应和裕度进行了鲁棒性分析验证。
1 着舰横侧向控制需求
在理想状态下无人机可无侧滑地降落在航母飞行甲板着舰区域内并顺利挂上阻素[6]。实际操作中,飞翼无人机将面临着十分复杂的着舰环境,影响飞机顺利着舰。分析可知,飞翼无人机着舰的横侧向控制需满足以下条件:
1)着舰航向范围的控制。为防止无人机在着舰后滑向侧方,需保证飞行航向与着舰甲板中心线方向一致,无人机的航向与航母飞行甲板的中心线夹角须控制在±3°范围以内。
2)着舰侧偏的控制。在飞翼无人机着舰过程中,需保证无人机理想着舰点控制在相对航母甲板中心线的±3 m距离以内[7]。
3)飞翼无人机航向的增稳控制。由于飞翼无人机的特殊气动布局,其航向不够稳定[8]。为保证航向的稳定性,需要设计增稳控制。
4)需要设计抗扰动能力强的横侧向控制律。海平面是一个复杂的着舰环境,在这样的环境下无人机在着舰过程中会受到大气扰动和舰尾流[9]等多种不同的扰动。为使无人机可以安全着舰,设计的横侧向控制律应可以很好地克服外来扰动带来的干扰。
为满足上文提出的4个控制需求,设计了如图1所示的无人机着舰横侧向控制结构。

图1 自动着舰横侧向通道控制结构
2 增稳控制律设计
飞翼无人机纵向模态偏于稳定,但是横侧向模态阻尼较弱。因此应进行增稳控制律的设计,使无人机模态稳定。
为了快速消除侧滑角,抑制荷兰滚模态的发散,需要增强航向静稳定性。为解决航向阻尼不足问题,文中将侧滑角β负反馈加入至方向舵通道,同时再利用改变滚转角速度来提高航向稳定性,让无人机模态趋于稳定。因此横侧向的增稳控制律结构为
(1)

图2 航向增稳前

图3 航向增稳后
3 滚转角控制律设计
飞翼无人机想要实现横侧向平动轨迹跟踪,必须在着舰过程中保持滚转角稳定。为实现无人机迅速、稳定地滚转,本文采用滚转角为外环控制、滚转角速率为内环控制的方式设计滚转通道控制律。图4所示为本文设计的滚转角控制律结构。
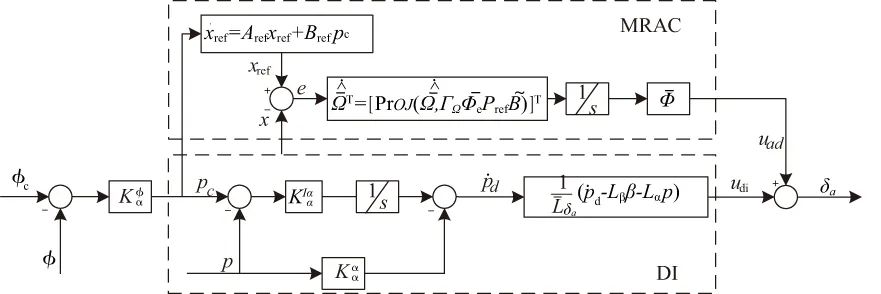
图4 滚转角控制律结构
本文对于滚转通道的控制律采用自适应动态逆理论设计。控制器中指令模型采用2阶系统模型,模型为
(2)

(3)

(4)
因此,滚转角速度动态逆控制律为
(5)

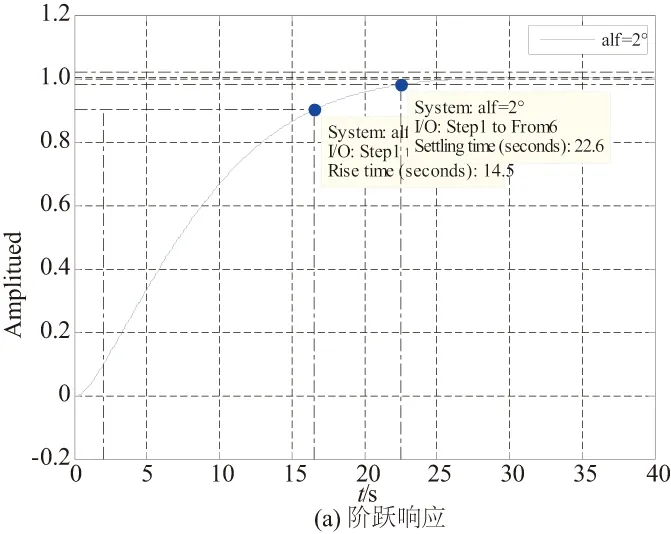
图5 滚转角速度阶跃响应与开环伯德图
在滚转角速率控制器设计的基础上,基于经典PID控制可设计滚转角控制律为
(6)
滚转角速度指令输入和滚转角输出的传递函数如下:
(7)
如图6所示,系统阶跃响应无超调,上升时间约为2.18 s,调节时间约为13.5 s,系统无静差。同时开环传递函数的相角裕度约为91.4°,幅值裕度约为38.1 dB,设计点的裕度达到要求。
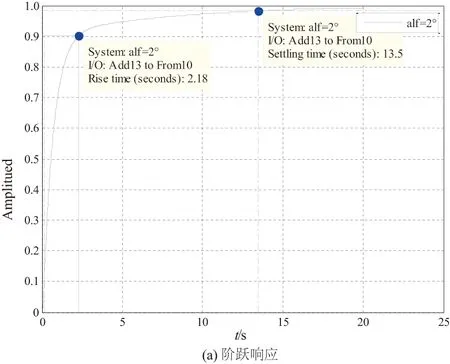
图6 滚转角阶跃响应与开环伯德图
4 平动轨迹跟踪控制律设计
为更好地使无人机实现平轨迹跟踪,需要将航迹角与舰船中心线对准并消除侧向偏差[10]。文中设计了如图7所示的水平轨迹跟踪控制律。

图7 平动轨迹跟踪控制律结构
航迹角对准甲板跑道中心线是平动轨迹跟踪的关键。航迹角控制通道是滚转角控制通道的外回路,故本文在滚转角控制律的基础上设计航迹角控制律,可得到滚转角指令输入到航迹角输出的传递函数为
(8)
由滚转角控制律可知,航迹角控制律为
(9)

图8 航迹角时域响应曲线与开环频域响应图
航迹角控制器只能使航迹角与甲板跑道中心线对准,但无法消除侧向偏差。本文选择在航迹角控制律的基础上设计侧向速度控制律,通过控制侧向速度调整无人机侧向位置来消除侧偏。
滚转角指令输入到相对侧向速度输出的传递函数为
(10)
采用比例积分环节设计侧向速度控制律,可得控制律为
(11)
在侧向速度控制律的基础上分析可知侧向速度指令输入到侧向位置的传递函数为

(12)
采用比例控制设计侧向位置控制律,可得控制律为
(13)
如图9所示,系统阶跃响应无超调,上升时间约为7.83 s,调节时间约为12.8 s,系统无静差。开环传递函数的相角裕度约为76.4°,幅值裕度约为45.9 dB,设计点的裕度达到要求。如图10所示,系统阶跃响应无超调,上升时间约为21.5 s,调节时间约为38.4 s,系统无静差。开环传递函数的相角裕度约为73°,幅值裕度约为24.1 dB,设计点的裕度达到要求。
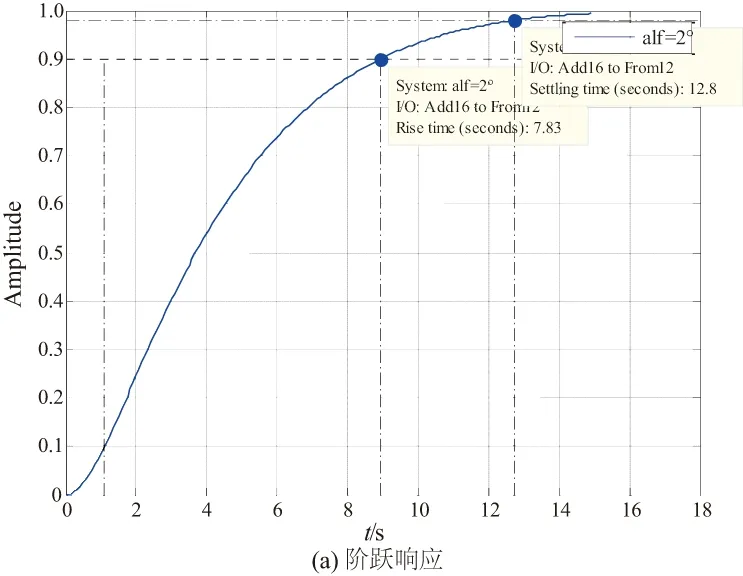
图9 侧向速度阶跃响应与开环伯德图

图10 侧向位置阶跃响应与开环伯德图
5 仿真验证
为了验证控制器的控制精度及控制效果,如图11所示,在Matlab/Simulink环境下构建了着舰仿真数值环境,根据仿真环境模型分别对飞翼无人机在平静大气环境与有舰尾流扰动的情况下进行着舰仿真。假设舰船以15 m/s的速度匀速前进,样例无人机在初始高度为120 m,速度为60 m/s,沿-3.5°理想着舰下滑轨迹着舰。

图11 某型无人机着舰数值仿真环境
1)平静大气环境下着舰仿真
由图12可知,无人机在自动着舰过程中横侧向保持无侧滑飞行;同时在过程中保持2 m/s的侧向速度跟随舰船的侧向运动;相对舰船甲板跑道中心线的侧向偏差最大约0.5 m,实现了无人机无侧偏触舰。
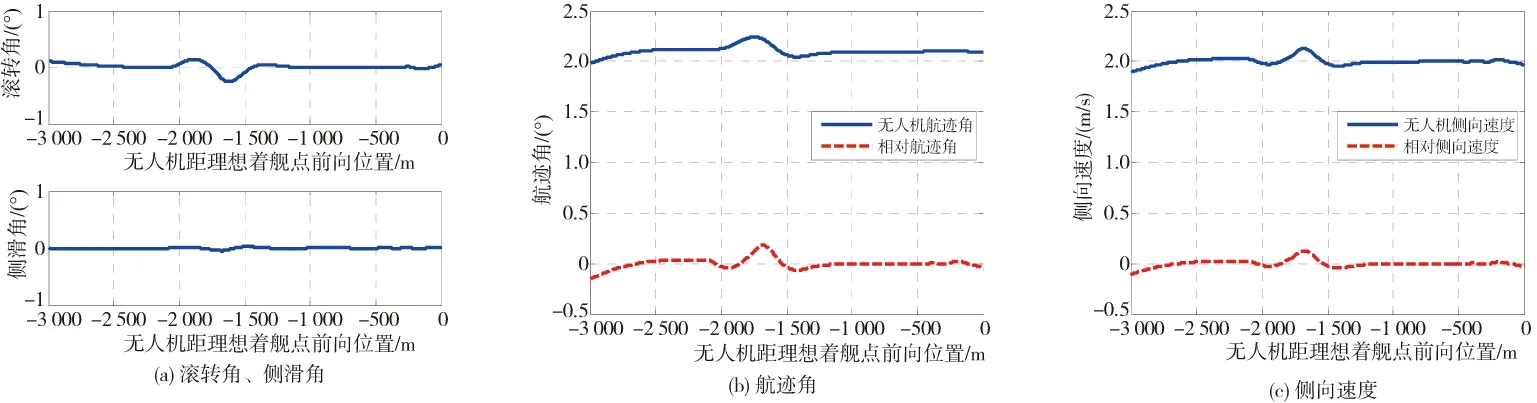
图12 平静大气环境下着舰滚转角、侧滑角、航迹角、侧向速度曲线
2)穿越舰尾流着舰仿真
为验证本文设计的控制器在舰尾流影响下的控制效果,在仿真系统中加入了舰尾流模型;仿真采用的舰尾流模型为MIL-F-8785C军用规范中规定的舰尾流[11]。
从图13可以看出,舰尾流对无人机的横侧向轨迹跟踪影响甚小。整个着舰过程中无人机与舰船保持了同样的侧向移动速度,侧滑角控制基本为0,侧向位置跟踪误差控制在±0.6 m内,实现了横侧向无侧滑、无侧向偏差的跟踪控制。
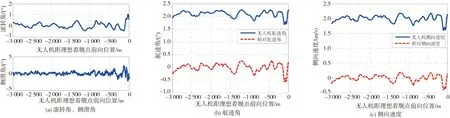
图13 穿越舰尾流下着舰滚转角、侧滑角、航迹角、侧向速度曲线
6 结语
本文针对舰载无人机着舰过程中姿态与空速控制问题,首先设计了航向增稳控制律,解决了横侧向荷兰滚模态不稳定的问题;其次基于自适应动态逆理论设计了滚转角控制律,使滚转角控制变得准确、稳定;最后设计了以航迹角控制器和侧向速度控制器,实现了平动轨迹的精确跟踪。
仿真结果表明:该控制方法可以满足着舰落点误差的要求,且对舰尾流有一定的抑制效果,对着舰研究具有一定的参考价值。
