机器人辅助下Endo-PLIF与PLIF治疗腰椎间盘突出症的近期疗效比较
2021-12-26张勇钱军葛鹏徐鹏李伟董福龙张银顺杨庆国申才良
张勇,钱军,葛鹏,徐鹏,李伟,董福龙,张银顺,杨庆国,申才良
(安徽医科大学第一附属医院脊柱外科,安徽合肥 230022)
腰椎融合技术在脊柱外科应用已有近百年历史,是治疗腰椎间盘突出症的经典术式[1]。相比于传统开放后路腰椎融合手术,经皮内镜辅助下腰椎融合术(endoscopic lumbar interbody fusion,Endo-PLIF)作为一种新的微创术式,其创伤小、出血少、恢复快,疗效可靠,术后早期即可佩戴腰围下床活动[2]。本研究旨在通过比较腰椎间盘突出症患者的手术出血量、手术时间、住院时间、术前术后VAS评分、ODI指数等指标,综合探讨骨科手术机器人辅助下经皮内镜腰椎融合术与传统后路腰椎椎体间融合术(posterior lumbar interbody fusion,PLIF)治疗腰椎间盘突出症的近期疗效情况。
1 资料与方法
1.1 一般资料
纳入2019年7月~2021年3月行腰椎融合手术治疗的腰椎间盘突出症患者50例,均满足以下纳入标准:①确诊为腰椎间盘突出症,且症状、体征与影像学资料相符;②单节段L4-5或L5-S1突出;③经保守治疗3个月以上无效或者效果不佳,不适合单纯孔镜减压,有融合手术指征。排除标准:①腰椎侧弯、腰椎畸形、腰椎肿瘤、腰椎感染等;②腰椎骨折、腰椎峡部裂、腰椎滑脱、腰椎不稳定、严重的腰椎管狭窄、传统开窗椎间盘摘除术后硬膜囊、神经根粘连所致的腰腿痛;极外侧椎间盘突出;工作通道难以置入的部分中央型突出或高髂棘L5-S1病变;③严重骨质疏松,双下肢神经症状,马尾综合征,椎间盘钙化,突出物严重钙化、卡压神经根变性坏死等。
根据患者手术方式,将50例患者分为两组:行PLIF手术的26例纳入PLIF组,机器人辅助下Endo-PLIF手术的24例患者纳入Endo-PLIF组。两组患者一般资料比较,差异无统计学意义(P>0.05),见表1。
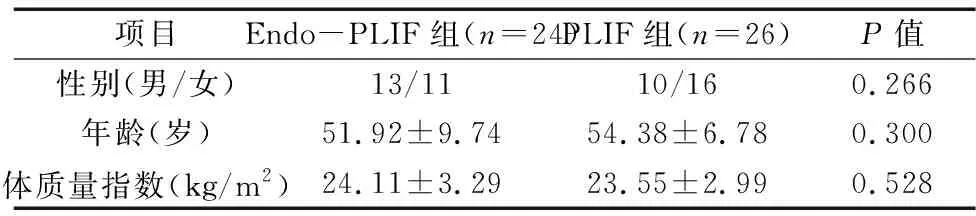
表1 两组患者性别、年龄、体质量指数比较
1.2 手术方法
50例均由固定的同一组医师进行腰椎融合手术。Endo-PLIF组:患者全麻后取俯卧位,胸腹部置U型垫,保持后正中线与手术创面平行,机器人辅助置入椎弓根螺钉导针,术区旁固定体表示踪器,连接3D-C臂系统和TiRobot机器人系统(天玑),启动并校准,行术区三维CT扫描,获取数字影像资料传送至机器人手术操作平台,规划椎弓根螺钉入点、方向、直径及长度,根据机器人机械臂固定方向放置套筒,并植入导针,行正侧位透视验证导针位置无误,移除机器人系统。取患侧两导针间区域作纵行1 cm切口,放置逐级套筒并放置工作套筒,连接脊柱内镜系统,用磨钻和枪钳切除部分上位椎板下缘、下位椎板上缘及关节突内缘,显露并咬除黄韧带,扩大神经根管,完全显露硬膜囊及神经根,采用旋管技术牵开神经根及硬膜囊予以保护,显露腹侧的椎间盘,以专用工具(见图1和图2)在内镜下切除椎间盘、处理软骨终板,处理椎间隙,拔出内镜、放置植骨漏斗,作椎间植骨,调试安装填充有自体骨及同种异体骨的椎间融合器,透视正侧位验证椎间融合器位置良好。再次放置内镜见神经根及硬膜保护良好。拔出内镜系统,沿各导针方向分别拧入空心椎弓根钉,经皮放置预弯的钛棒,适度合抱并锁紧螺母。冲洗切口并逐层缝合。PLIF组:患者全麻后取俯卧位,胸腹部置U型垫,消毒铺巾,贴无菌碘膜,术区作腰背部正中纵形切口,依次分层切开皮肤、皮下、深筋膜,沿棘突向两侧剥离椎旁肌至腰椎小关节突与横突交界处,以weinstein法定位椎弓根进针点,置入椎弓根螺钉,C臂透视验证螺钉位置。咬除椎板,显露黄韧带,分离并显露硬膜囊及神经根,松解黏连,两侧椎板及关节突关节下进行潜行减压,扩大椎管及神经根管,保护好神经根及硬膜,切除椎间盘、刮除终板、冲洗椎间隙,椎间隙打压椎骨,并植入填充有自体骨及同种异体骨的椎间融合器,取合适长度的钛棒并预弯,上棒,适度合抱并锁紧螺母,冲洗切口并逐层缝合。

图1 工作套筒放置后椎间隙处理术中透视和椎间隙处理工具

图2 椎间隙处理工具及椎间隙植骨
1.3 术后处理
术前30 min及术后24 h预防性使用抗生素,术后常规应用甘露醇、激素脱水消肿,并应用营养神经等治疗。卧床期间嘱患者行双下肢功能康复锻炼,下床后逐步行腰背肌功能锻炼。其中,Endo-PLIF组术后嘱患者卧床3 d,佩戴腰围下床活动,4周后去除腰围正常活动。PLIF组术后嘱患者卧床10~14 d,佩戴腰围下床活动,3个月后去除腰围正常活动。
1.4 研究方法
①统计两组患者的手术时间、术中出血量、住院时间,并统计手术并发症发生率;②采用VAS评分进行围手术期疼痛的评价;术后3 d、3个月、6个月时,采用Oswestry功能障碍指数(Oswestry disability index,ODI)进行术后功能恢复程度的评价。
1.5 统计学处理
2 结果
Endo-PLIF组的术中失血量和住院时间均显著少于PLIF组,但Endo-PLIF组的手术时间显著长于PLIF组,差异均有统计学意义(P<0.05),见表2。两组术后3 d、3个月及6个月随访时的VAS评分、ODI指数均有显著改善,其中,Endo-PLIF组术后3个月、6个月的两项指标均显著低于PLIF组,差异有统计学意义(P<0.05),见表3。两组患者均未发现神经根损伤、血管损伤、椎间隙感染、融合器移位、螺钉位置不佳等并发症,但PLIF组发生1例切口愈合不良,经清创缝合后痊愈。典型病例术后X线片见图3-4。
表2 两组患者手术时间、出血量、住院时间比较
表3 两组患者术前、术后VAS评分和ODI评分比较
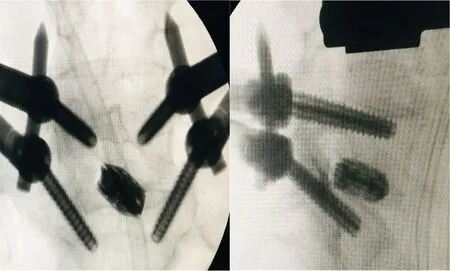
图3 Endo-PLIF术后腰椎正侧位X线片
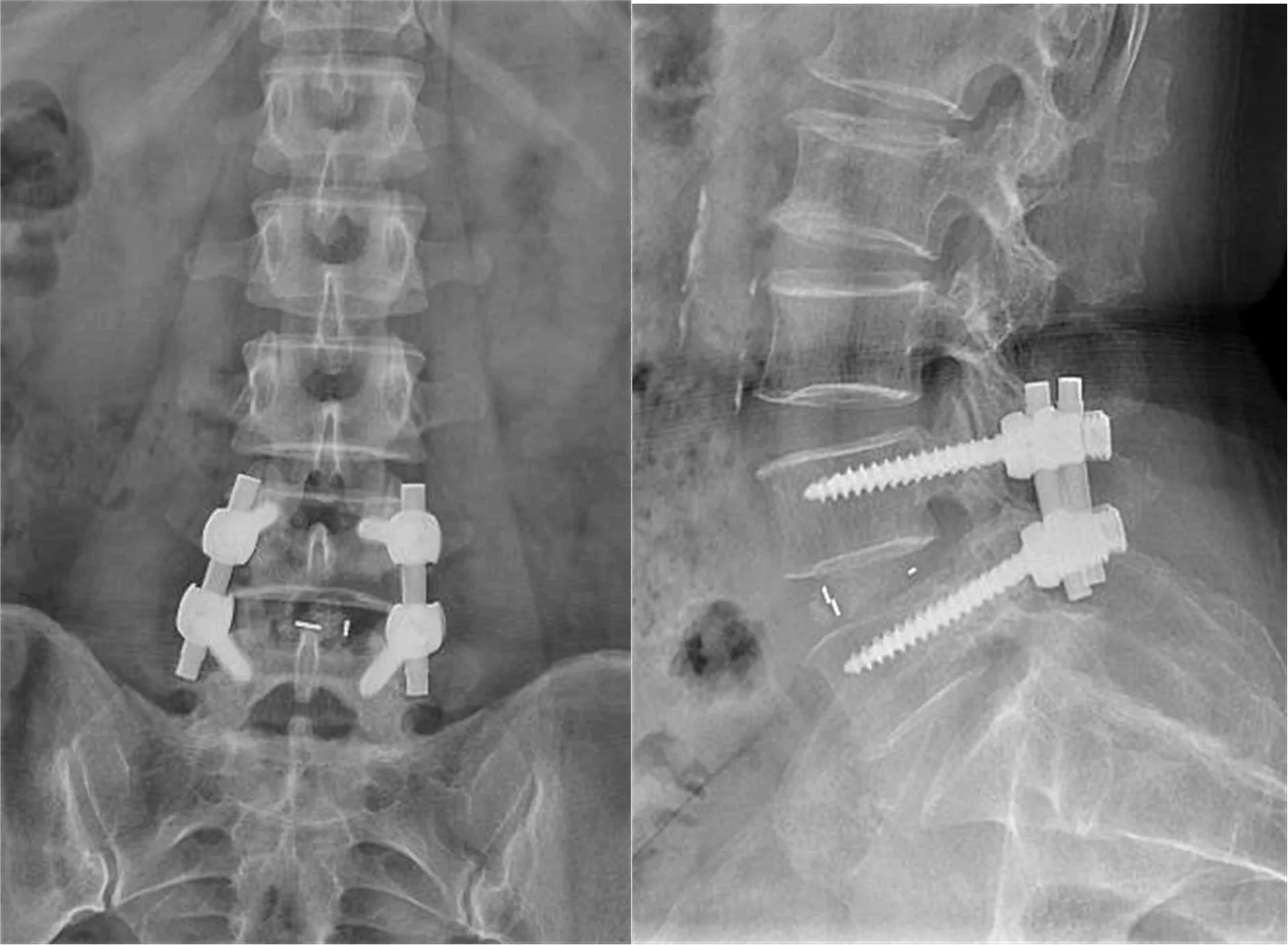
图4 PLIF术后腰椎正侧位X线片
3 讨论
传统PLIF手术作为经典的开放腰椎融合术式[1],其优点是手术视野开阔、操作空间大、减压范围广,但椎旁肌等软组织剥离较多、出血量较大[3],且术中需持续牵开椎旁肌,导致椎旁肌、皮肤缺血,进而增加术后并发症的发生风险[4,5,6]。本研究中,24例患者采用内镜辅助下腰椎融合术,通过较细的工作扩张通道系统,建立有效的手术通道,减少了术中失血量,最大限度减少了对椎旁肌肉的牵拉和损伤及软组织的剥离,取得了满意疗效。
经皮内镜辅助下腰椎融合术是将脊柱内镜技术与腰椎融合术完美结合的一种术式[7,8,9],较MIS-TLIF[10,11]及其他微创术式比较,对软组织损伤更小、出血更少[12]。该手术放置的工作套筒直径较小,对肌肉牵拉及剥离少,通过钝性分离可快速显露腰椎病变节段的术区结构,故在理论上,Endo-PLIF手术可明显缩短术区显露时间。但本研究中,Endo-PLIF组手术时间显著长于PLIF组,这与Endo-PLIF术行椎管减压的术野较小、助手配合、机器人设备准备和导针规划置入等因素有关,导致手术时间较长。但通过笔者观察与统计,随着手术者经验增加和技术成熟,以及手术设备的空间布局、使用流程的优化和配合度的默契,手术时间整体在逐步缩短。
Foley最早在1992年运用Stealthstation导航系统辅助椎弓根螺钉等定位[13],拉开了骨科手术机器人使用的序幕[14]。传统的PLIF组手术主要通过解剖标志定位并结合术中影像进行置钉,据文献报道,椎弓根置入失败率可达4.9%~37.5%[15,16],同时,术者经验不足、解剖标志不清晰也会导致置钉失败,导致血管、神经损伤等并发症发生。本研究Endo-PLIF组使用机器人辅助置钉,目前本科使用的天玑骨科手术机器人是根据术中的三维影像和手术方案进行合理规划,不仅可精确定位辅助置钉,同时可辅助置入工作套筒[17],减少透视次数、出血量及手术时间,提高手术精准度。此外,与PLIF组相比,Endo-PLIF手术不仅避免了对椎旁肌的广泛剥离和牵拉,还保留了棘突、棘上韧带、棘间韧带等脊柱后柱以及椎旁肌的完整性,最大限度保护了腰椎稳定性结构,显著降低了患者术后早期腰痛症状,并改善术后腰部功能。
综上所述,本研究不仅将脊柱微创通道系统应用于腰椎融合术中,还巧妙地结合骨科机器人辅助技术,手术效果确切,对椎旁肌、神经的影响小,具有出血少、恢复快、术后功能更好的优势,但远期疗效仍需大样本、长期临床随访进一步探讨。