基于关系型数据结构的港口控制系统设计
2021-12-24高小剑
高小剑
中交机电工程局有限公司
1 引言
港口控制系统设备类型多、数量大,控制流程复杂,一个港口可能包含几十个甚至上百个控制模式,一个设备可能参与在几个甚至几十个控制模式中。不同的模式下,同一设备控制逻辑极易交叉。采用完全枚举法,极少的设备数量或控制模式改变,都会引起程序巨大的改变[1]。将关系型数据结构引入控制,用关系型数据模式字确认代替模式的解析过程,使模式解析和设备执行分层进行,减少模式之间的逻辑交叉,增强程序的可扩展性和编程灵活性,在复杂控制系统中具有重要意义。
2 控制系统现场硬件设计
以港口皮带机系统控制为例,为确保其有效性和稳定性,同时兼顾项目成本投入,控制系统采用经典的分层结构,分为中心级控制和现场级控制(见图1)。

图1 港口控制系统分层结构图
中心级控制位于整个港口控制系统的核心,负责整个港口传输控制系统的协调,将控制模式的选择、执行前的判断、流程的控制命令根据现场实际连接有序地下发到各个分站控制器;同时接收各个分站的状态信息,并通过与上位软件的通信,将现场控制系统设备的实时状态在上位界面上进行呈现[2]。
现场级控制中各分站负责收集本站周围的皮带机系统的运行状态信息,接收中控的控制命令,并经过逻辑运算,将最终的控制命令下发到控制区域内的设备控制器中。在和中心级控制发生通信故障时,能够按照预先设置好的程序,对区域内的设备进行有序的控制。
3 控制系统软件设计
3.1 主控制字的编码
系统的主控制字用于对控制模式的快速选择、下发前的快速的判断,借助数据结构,将现场控制单元的控制命令、位置信息、和运行状态反馈信息、故障信息以一定的数据结构进行编码。
为了方便介绍,假设该系统包含8条皮带机,3个三通,15个控制单体,将所有的设备按照顺序,用1个位(bit)表示1个控制单体,用1个字(Word)型变量表示编码系统所含设备的控制信息(见图2)。
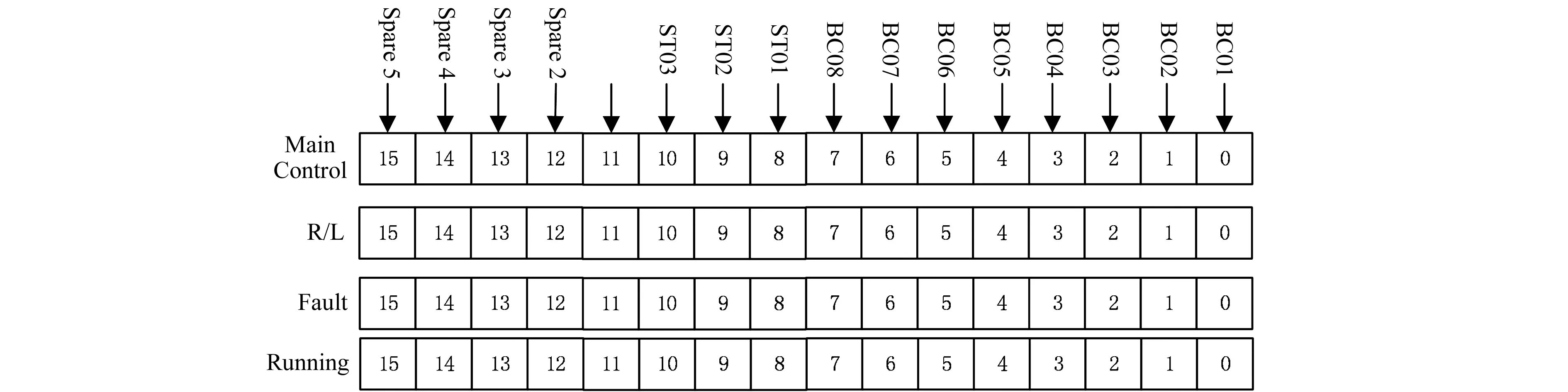
图2 主控制字编码示意图
(1)主控制字(Main Control)编码。主要负责将港口皮带机控制系统所有皮带机、三通闸门等与流程连锁控制有关的控制单体进行编码。1个控制单体用1个位(bit)编码,如皮带机参与该条流程控制,则对应位置1。例如Main Control[0]=1,表明该BC01皮带机参与该条流程的控制,否则,Main Control[0]=0,表明该BC01皮带机在该条流程中不需要参与控制。
(2)位置字(Remote/Locel)编码。对所有参与系统流程的单体设备的远程或就地位置进行编码,每个控制单元用1位(bit)表示。位置字为“1”,表示当前该控制单元处于远程状态,可以通过上位机控制;否则,表示该控制单元处于就地状态,不能参与流程控制。只有当所有参与流程控制的单体都处在远程位置时,该流程才具备执行的先决条件。
(3)故障字(Fault)编码。系统自动控制过程中,为了避免设备带故障运行,需要将所有控制单体的综合故障进行编码,如果系统中有控制单体处于故障状态,则不允许该流程被选中执行。这里的故障指综合故障,是所有能够引起控制单体停机的故障的综合体,例如皮带机的拉绳禁停、重跑偏、撕裂开关、堵塞故障、开关柜故障、电机绕组及驱动轴温度过高等可能引重大事故或者设备重大损害的故障。如果控制单体处于故障状态,将在故障字中对应的位(bit)置0,否则置1。
在执行过程中,将设备的Remote/Local、Fault状态时刻进行扫描,将设备反馈状态实时的写入Remote/Local、Fault状态字,以上状态字的编码,可为流程下发执行前的判断做好准备。
3.2 辅助控制字的编码
流程辅助控制字(Auxiliary)格式见图3。根据主控制的排列顺序,对每个控制可能具有的控制命令进行编码,如BC01皮带机有正转控制、反转控制、停止控制,则由辅助控制字Auxiliary[1]的第0、1、2共3个(bit)表示,“001、010、100”分别表示BC01正转控制、反转控制、停止控制3个控制命令。同理,电动三通ST01有2个导通方向,由辅助控制字Auxiliary[2]的第2、3共2个位(bit)表示,“01、10、00”分别表示ST01 A向导通、反转控制、无需控制。这样把所有控制单体按照主控制字的顺序依次在Auxiliary[1]、Auxiliary[2]中排列编码。某一条控制流程所包含控制单体的控制命令都存储在Auxiliary[1]、Auxiliary[2]2个辅助字中。如果设备较多,可以多设置几个字节,增加设备时,仅需将设备的控制特性排列在Spare区域即可,不需改变数据结构和后续已有控制单体的执行程序。

图3 流程辅助控制字结构图
设备的执行状态字Running与Auxiliary相对应,每一位为对应设备的运行状态,如BC01正转运行时,将Running[1].0置1,这样流程的执行结果,均可以通过辅助控制字和执行状态字相同的逻辑表达实现,极大地降低了控制算法工作量,增加了程序的通用性和扩展性。
3.3 流程控制表的编制
流程控制表包含3个部分,流程索检表、主控制字表、辅助控制字表。1组主控制字和辅助控制字组成1个流程的控制字组,称为1条记录,系统有多少控制流程就有多少条记录。
根据工艺提供的要求,首先对所有流程进行编号,并将编号按照顺序录入控制程序的存储区中,形成模式检索表(见图4)。为了增加控制系统的扩展性,在编制索检表时要做好足够的备用空间,在备用的区域Mode Num设为0,工艺增加控制流程时,只需将实际流程编号写入对应的索检表中Mode Num值中即可。

图4 模式检索表
主控制字、辅助控制字与索检表相对应,在程序控制区中,分别为一个N×n1、N×n2矩阵,其中N为索检表中记录的个数,n1为每个主控制字中所占的字节数,n2为每个辅助控制字中所占的字节数。程序可以根据流程的索检编号Index,根据线性对应关系快速定位到流程主控制字和辅助控制字的开始地址,将主控制字和辅助控制字搜索出来。
需增加模式时,只用在流程索检表加入流程编号,主控制字表、辅助控制字表中将对应流程控制单体的编码值填入即可,而不用修改具体设备的执行程序,使得流程的增减及扩展更加灵活,增加了程序的扩展性和移植性。
3.4 流程执行控制
系统的流程执行控制流程见图5。

图5 系统流程执行控制流程图
3.4.1 流程下发前的判断
以下判断过程,对主控制字、远程就地位置字、故障字的逻辑过程均以字为单位进行,实际流程占用几个字节,就进行几次判断。为了说明的简洁性,所有的判断过程均按占用1个字节为例说明。
当系统下发模式时,首先判断当前系统所处的状态,如果上一个模式还在执行过程中,模式执行标志位为1,则不能将新的模式下发,能够避免2个模式存在设备交叉,要求设备执行相反操作,给设备带来巨大冲击,以保护设备安全,提高设备使用寿命。
模式执行中标志位为0且下发模式不等于已执行成功的模式时,允许程序扫描检索表,找到程序下发的模式,根据索引值Index在主控制表中检索出下发模式的主控制字和辅助控制字,并在下发前完成以下判断。
(1)判断流程所包含的设备是否均处于远程状态,判断方式见式(1):
A=Main Control & Remote⊕Main Control
(1)
首先,对Main Control和Remote状态字进行逻辑“与”操作,排除本流程外控制单体状态对于本流程判断的干扰,与本流程无关的控制单体将不会参与到后序逻辑运算。然后,将逻辑运算结果与Main Control控制字进行逻辑“异或”运算,如果A≠0,则说明本流程中至少有一个设备处于就地位置,不能远程完成控制单元的控制,该流程不能执行成功,程序拒绝流程下发执行,同时会在上位机上显示该流程无法下发,本流程中有控制单体未处于远程状态;如果计算结果A=0,则说明参与本流程执行的所有设备均处在远程位置,可以远程启动或者停止流程中所有控制单体。
(2)判断模式中所选中的设备是否有的处于故障状态,将Main Control和Fault状态字进行逻辑“与”操作,见式(2),排除与本条流程外的控制单体,如果流程包含的控制单体均正常,则B=0,可以下发该流程。
B=Main Control & Fault⊕Main Control
(2)
3.4.2 模式设备的执行
经过判断,流程所涉及的控制单体均能远程控制、状态良好,且没有被占用,符合流程下发的条件。程序根据索检编号Index流程记录的线性对应关系。快速定位到流程主控制及辅助控制字的开始地址,把主控字和辅助控制字搜索出来下发到程序的执行区中,同时将选中设备的执行结果实时更新到运行状态字Running中,参与模式执行结果的判断。
3.5 模式执行成功与否判断
根据流程辅助控制字中的控制目标状态和运行状态字的实际执行结果,通过式(3)逻辑运算,判断模式执行成功与否。
C=Auxiliary & Running⊕Auxiliary
(3)
在设定的流程执行时间内,C=0,则该模式包含的全部设备均达到了流程期望达到的状态,模式执行成功;否则,超出了模式执行时间,或者有控制单体没有达到预定的动作,程序判断流程执行失败。
4 结语
将关系型数据结构引入港口复杂的流程控制中,用流程记录代替传统完全枚举法执行过程的复杂逻辑关系,实现流程解析和设备运行的分层和相对独立控制,减少程序控制过程中的逻辑交叉,使程序控制变的简单,实现过程更加灵活,易于扩展和移植。此方案已在多个工程实践中使用,操作简单,运行稳定可靠,具有一定的推广价值。
