多课程融合的工业机器人专业实践教学探索
2021-12-22黄贤振程贝贝
岳 刚,黄贤振,程贝贝
(1.天津交通职业学院,天津 300110;2.天津职业技术师范大学,天津 300222;3.天津光电安辰信息技术股份有限公司,天津 300000)
引言
随着工业机器人专业人才需求逐步扩大,职业院校开始培养相关人才并逐步扩大招生规模,工业机器人专业从批准招生到现在,几年的时间里迅速扩张,从教材、课程、网络资源、大赛这四个方面来看都呈现着井喷的势头,发展一片大好。工业机器人专业是集成性很强的专业,包括了机械、电子、自动化等多方面的知识,工业现场也通常是综合性的应用,但在授课中发现,许多专业课尤其是工业机器人工作站系统集成、工业机器人系统离线编程与仿真、工控组态与现场总线技术这三门课的关联性很强,但往往只能单独进行授课,学生所接触到的知识是孤立的,只能通过课堂上老师口述了解本门课所学知识的实际应用,无法切身体会,往往在工作后无法应用所学知识解决实际遇到的复杂问题。因此,需要进行面向工业机器人专业的多课程联动机制探索。
一、多课程联动教学的意义
进行多课程联动机制探索,不仅对工业机器人专业学生的知识理解及技能掌握有帮助,而且能帮助学生在逐个课程学习的同时建立复合型整体性的认识能力。文章以《工业机器人工作站系统集成》《工业机器人系统离线编程与仿真》《工控组态与现场总线技术》三门课程为例,进行多课程联动教学机制的探索,寻求融合性多课程融合实验的实现方案。在强化课程应用性的同时,引导学生建立整体的课程观,从认知的层次提高学生的学习兴趣,扩展学生对技能的应用能力,打造技能优化型课堂。
二、多课程联动教学的思路
选定三门课程的课程内容进行整合,寻找可行的契合点。
工业机器人系统离线编程与仿真主要讲解建立仿真工作站,是工作站的设计和仿真验证环节。在仿真工作站中,能直观地看到工作站的整个运行过程,包括机器人以及外部运动部件的运动与配合;能实现机器人与外部设备的I/O或数据通信;能编写和调试机器人运行程序。在建立仿真工作站时,对于工业机器人以外的运动部件,需要进行一定的简化,例如AGV简化为长方体。让学生依据现有的实际工作站进行仿真工作站的建立,能够训练学生的简化模型能力、编程能力、整体设计能力,但通常仿真工作站中的机器人程序不会拿到实际机器人中运行调试,缺少了必要的现实验证环节,可以将程序的现实验证作为契合点,在工业机器人系统集成课上进行实际调试验证,帮助学生建立虚拟与现实的联系。
工控组态与现场总线技术主要讲解工业现场各设备间通信控制、操作界面设计、总线接口调试等技能,在课上针对实际机器人工作站的场景进行组态和总线调试,虽然涉及硬件的调试和控制界面的调试,但往往仅限于信号的交互,并没有总体的运行调试。因此可以将整个工作站的联合调试作为契合点,在工业机器人系统集成课上进行调试验证,帮助学生建立两门课程的联系。
工业机器人工作站系统集成课,主要涉及硬件选型、系统设计和实施,在实际教学中往往只进行纸面上的分析设计,或针对实际工作站进行分析,理论性比较强,学生无法直观地体验到系统集成的应用场景。因此可以将工业机器人系统离线编程与仿真课上编写的程序、工控组态与现场总线技术课上编写的控制界面、总线陪着放到工业机器人工作站系统集成课上,将总调试作为契合点,即实现了实际调试,也为学生建立了相互联系的课程体系,增强了学生的学习兴趣。
在课程分工方面,工业机器人系统离线编程与仿真课上可以进行已有场景的搭建,通过建立整个工作站的模型,在工业机器人系统离线编程与仿真课上使工作站按照已有的方案运行,帮助学生理解整体工作站的运行过程,之后在工业机器人系统离线编程与仿真课上完成程序的编写;在工控组态与现场总线技术课上绘制控制界面,将需要的控制按钮以及调试参数显示在触摸屏上,为实际工作站的调试和运行打下基础;最后在工业机器人工作站系统集成课堂上进行总体调试,包括机器人程序的调试、组态界面的调试以及工作站其他组件的运行调试,完成由虚拟走向实际的升华。在课程评价方面,依据项目在三门课上各自占有的课时量进行评分的加权汇总。
三、多课程联动教学实施过程
(一)课程总体分工
将整个实训环节拆分为三个部分,分别在三门课程中进行完成,在整体上三门课程以实训室现有工作站为设计目标,对工作站各模块进行分解,分为工业机器人仿真模型构建、工业机器人程序编写、现场总线通信、组态监控界面构建、工作站调试这几个方面,并最终在工业机器人工作站系统集成课上进行总体调试和实现。
依据各任务所需的时间确定具体课程分工和课时量,如表1所示。同时在三门课上对学生的表现分别打分,并在工业机器人工作站系统集成课上参考前两门课学生的任务完成情况进行总体分数的汇总。

表1 课程总体分工
(二)实训内容选取
在工业机器人系统离线编程与仿真课堂上,以实训中心现场场景为蓝图,如图1所示,以机器人、AGV、传送带为实施工具在RobotStudio软件中建立模型,如图2所示,并通过Smart组件以及机器人程序让整个仿真模型按照设定好的方案进行运动。具体动作模式为AGV将承载有工件的托盘运送到传送带的起点,并将托盘输送到传送带上,由传送带将托盘输送到机器人抓取位置,机器人将工件取走,传送带反向运动将空托盘传递给AGV,AGV将空托盘运输走。

图1 实训中心现场场景
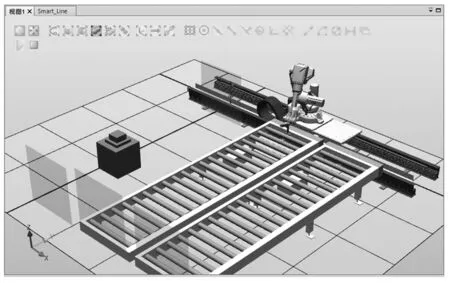
图2 离线编程课堂建立模型
在模型建立过程中,通过现实场景和虚拟场景的结合,对现实模型的合理简化,引导学生建立正确的仿真观念,建立虚拟与现实之间的联系,将课程所学在现实中进行实现,能够培养其技能操作的自信。
在工控组态与现场总线技术课堂上,结合虚拟场景的运行过程,完成运行控制界面的搭建;在工作站系统集成课堂上,将虚拟场景中编写的程序导入到现实场景中,通过运行控制界面完成现实场景的控制,从而完成从虚拟场景到现实场景的回归。
(三)课程实施细则
在工业机器人系统离线编程与仿真课堂上,通过构建现场场景,感受虚拟与真实的比例关系,学习模型的简化及替代、信号的走向、探究整个场景系统中的运动关系、信号关系、属性关系,编写程序,培养其面向实践的操作能力。通过编写机器人程序,实现机器人的运动,并依据实际工作站状态,建立机器人与AGV、传送带之间的信号关系,训练学生的简化模型能力、编程能力、整体设计能力。最后在仿真中对整个工作过程进行检查,对不符合实际的场景和动作进行修正,最终让学生能够在编写机器人程序的同时,缕清整个系统中各运动部件之间的运动、信号等关系,为后续调试打下基础。
在工控组态与现场总线技术课堂上,实现信号的交互、总线参数设定,依据工作站控制需要,编写整体控制界面,进行信号及状态的控制、显示,实现系统运行的控制及运行过程的监控。针对实际机器人工作站的场景进行组态和总线调试。
在工业机器人工作站系统集成课堂上,将工业机器人程序、总线信号的交互、各运动部件的动作配合进行总体的运行调试,从而将虚拟调试的内容复现到实际场景中,实现虚拟调试的现实落地,通过对工业机器人程序进行调试,标定程序中的目标点、工具坐标、工件坐标,使虚拟与现实真正结合起来。进行组态调试,测试控制信号、传感器信号的正确性。最后进行总体运行调试,最终完成整个实训过程,通过实际调试验证,帮助学生建立虚拟与现实的联系。
通过三门课程的联动,在授课中找到课程间的契合点,充分地将工业机器人专业人才培养方案中的专业课程紧密联系起来,共同组成一个完整系统,帮助学生建立全局及联系的观念,为学生展示了工业现场编程调试的全过程,从仿真到实践的递进的过程中,学生亲身经历了仿真编程、实践操作的完整过程,能够从自身经历的中体验到三门课程紧密的关系,也能够更好的理解三门课程的意义以及应用,从而激发学生的学习热情和动力。
四、课程评价机制
在评价环节,本次实训过程共涉及三门课程,按照实训过程的课时量组成,对三门课程的打分分别确定权重,最终得到综合评定的方式进行评价。设计的总课时量为16课时,满分100分,则每课时任务赋分6.25,由任课老师依据学生表现情况进行打分,三门课程的权重见表2。

表2 课程评价权重
五、教学改革的预期效果
依据各课程已有的实验指导书,制定了用于多课程融合实验的《工业机器人综合实训指导书》,经过两届学生,共120人的实际授课验证后,逐渐完善并依据授课效果进行了微调,最终成型。在授课过程中,学生的上课积极性明显提升,对于自己编写的程序实际上机调试跃跃欲试,学习效果良好。课程融合一方面加强了教师间的交流合作,加强了专业课程的整体性,避免了某些知识点的重复讲解,增强了课程之间的联系;另一方面通过进行多课程的融合,能帮助学生建立良好的全局观念,增强学生的学习兴趣,强化其专业知识的应用能力,逐渐建立运用所学知识综合解决问题的能力。
结束语
以工业机器人的三门专业课为例,综合各专业课程之间的联系,探讨多课程融合授课模式,基于工业现场岗位要求,进行课程实验设计,对多课程联动教学实施过程、评价机制进行了详细举例说明。多课程融合的教学模式促进了技能课程的联动融合,能够帮助学生逐渐建立运用所学知识综合解决问题的能力,具有一定的应用价值。