受激并车弧齿锥齿轮系统两参量平面上解域界结构
2021-12-16林何洪灵江俊胥光申
林何 洪灵 江俊 胥光申

摘要: 为掌握齿轮系统激振参数对系统动态特性的影响规律,建立了考虑多种激励的并车弧齿锥齿轮系统非线性动力学模型。应用胞映射(CMM)与区域离散分解技术(DDM)构建并数值求解了多组两参量平面上的解域界结构,算法基于吸引子在Poincaré截面上的点映射准则。通过分岔图和最大Lyapunov指数等分析了系统稳态特性,结果表明,啮合频率分岔路径上外加误差激励可使分岔中的部分周期分支收缩和转变。求解了阻尼比和综合传动误差分别与其他参数配置下的解域界演变,解析出周期域、混沌带与边界胞等分布特征,确定了目标参数域中周期分岔全局覆盖性态,通过最大Lyapunov指数和Poincaré映射验证了解域界算法中各态子域胞集的有效性。
关键词: 非线性振动; 并车弧齿锥齿轮; 胞映射; 区域离散分解; 解域界
中图分类号: O322; TH113.1 文献标志码: A 文章编号: 1004-4523(2021)05-1020-07
DOI:10.16385/j.cnki.issn.1004-4523.2021.05.016
引 言
齿轮装置在运转中常伴随着多样化的内、外部激励,这些激励的强度与系统振动响应特性息息相关,因而对齿轮系统振动规律与参数配置间作用机制研究具有实际指导意义[1]。相比常规齿轮传动,并车弧齿锥齿轮具有多啮合副同时工作,构型紧凑的特点,可实现高速大功率与重载高传动比应用,因而在航空、舰船与风电等动力分配要求高的场合受到青睐,如黑鹰UH?60A型直升机主减中即采用了并车弧齿锥齿轮构型[2?3]。在对其动力学研究中,相空间解的问题受到了学者们的较多重视,同样,掌握激振参数下丰富的解域构造与解域趋势对系统稳定控制与全局优化、预测同样意义显著,亦逐渐受到关注[4?6]。
通常分岔图和最大Lyapunov指数可对多源激励从独立维度离散解析,而多参量层面揭示则略显不足与低效。解域界研究基于胞映射思想对参数空间胞化求解,将同状态胞参数归入同一域内,域与域间分界为域边界,胞映射(Cell Mapping Method, CMM)是由Hsu提出的[7],经后期改进发展出诸多版本,较典型的如插值胞映射(ICM)和广义胞映射图论法(GCMD)等。刘晓君等[8]在GCMD基础上还提出拓展广义胞映射法(EGCM),并成功应用在分数阶Duffing系统全局域边界激变和内部激变研究中。为规避齿轮系统的混沌问题,文献[9?10]借助Melnikov原理在不同参数空间追踪了时变直齿轮模型下全局同宿分岔临界值和混沌迁移,从数值仿真上验证了参数域分析的优势。Gou等[11]采用简单胞映射与逃逸时间算法针对扭振齿轮副模型进一步在参数域平面上得到周期吸引子域分形结构,并揭示了同宿或异宿轨道是由不同周期轨迹交汇引起的。文献[12?14]还从全局解域角度研究了多类非自治系统中内嵌的Wada域、瞬胞集与混沌散射(chaotic scattering)等深层物理现象。Liu等[15]较早地尝试以参数胞区域分解方式对弾性辐板齿轮系统进行解域界研究,基于域界区指导了系统混沌响应激振控制。此外,齿轮系统动力学参数解域界构造,兼顾宏观与微观层面对系统振动演化广泛研判,从二维或多维视角灵活统筹,详尽解析相胞稳态域在解域界内的Poincaré映射集,在多参数下持续遍历受激胞元信息,反馈出分岔集、窗口带、临界值及敏感域等;反之,特定需求下亦可快速寻找定位其主导激励振源,甚至关键诱导值域,进而避开混沌或噪声复杂区间,特别对系统初期动载设计及参数全局优化意义显著。
本文建立了并车弧齿锥齿轮传动系统的动力学模型,在一维参数域中对比分析了两种参数协同作用下啮合振动中分岔分支的断裂收缩行为及分岔节点的转移。面对啮合传动误差和阻尼比等主要动力学参数构建了多组解域界,从不同维度数值模拟激励参数的全局性态和相互耦合状况,同时为多源激励优化明确目标周期态下的参数值域交集提供了一种思路,最后提取相关参数胞值利用最大Lyapunov指数验证了解域界的准确性。
1 动力学建模与振动方程
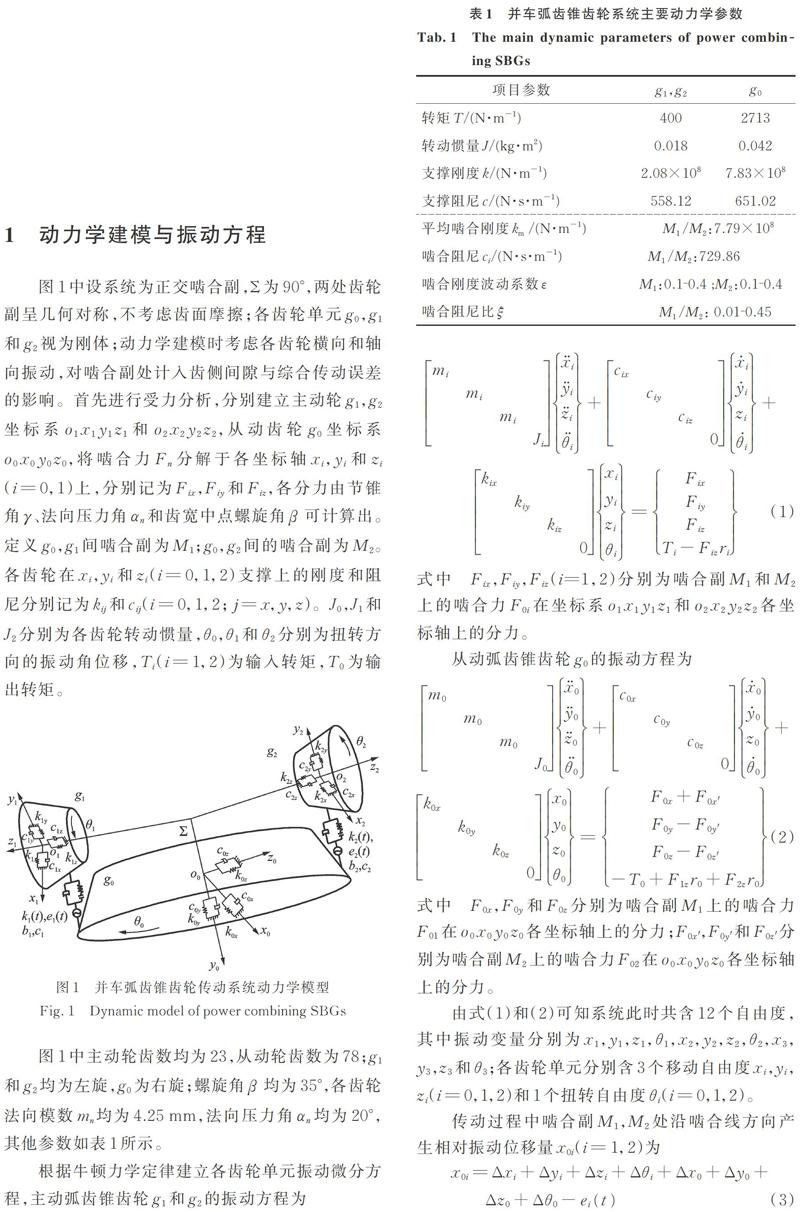
图1中设系统为正交啮合副,为90°,两处齿轮副呈几何对称,不考虑齿面摩擦;各齿轮单元,和视为刚体;动力学建模时考虑各齿轮横向和轴向振动,对啮合副处计入齿侧间隙与综合传动误差的影响。首先进行受力分析,分别建立主动轮,坐标系和,从动齿轮坐标系,将啮合力分解于各坐标轴,和()上,分别记为,和,各分力由節锥角、法向压力角和齿宽中点螺旋角可计算出。定义,间啮合副为;,间的啮合副为。各齿轮在,和()支撑上的刚度和阻尼分别记为和(; )。,和分别为各齿轮转动惯量,,和分别为扭转方向的振动角位移,()为输入转矩,为输出转矩。
图1中主动轮齿数均为23,从动轮齿数为78;和均为左旋,为右旋;螺旋角均为35°,各齿轮法向模数mn均为4.25 mm,法向压力角均为20°,其他参数如表1所示。
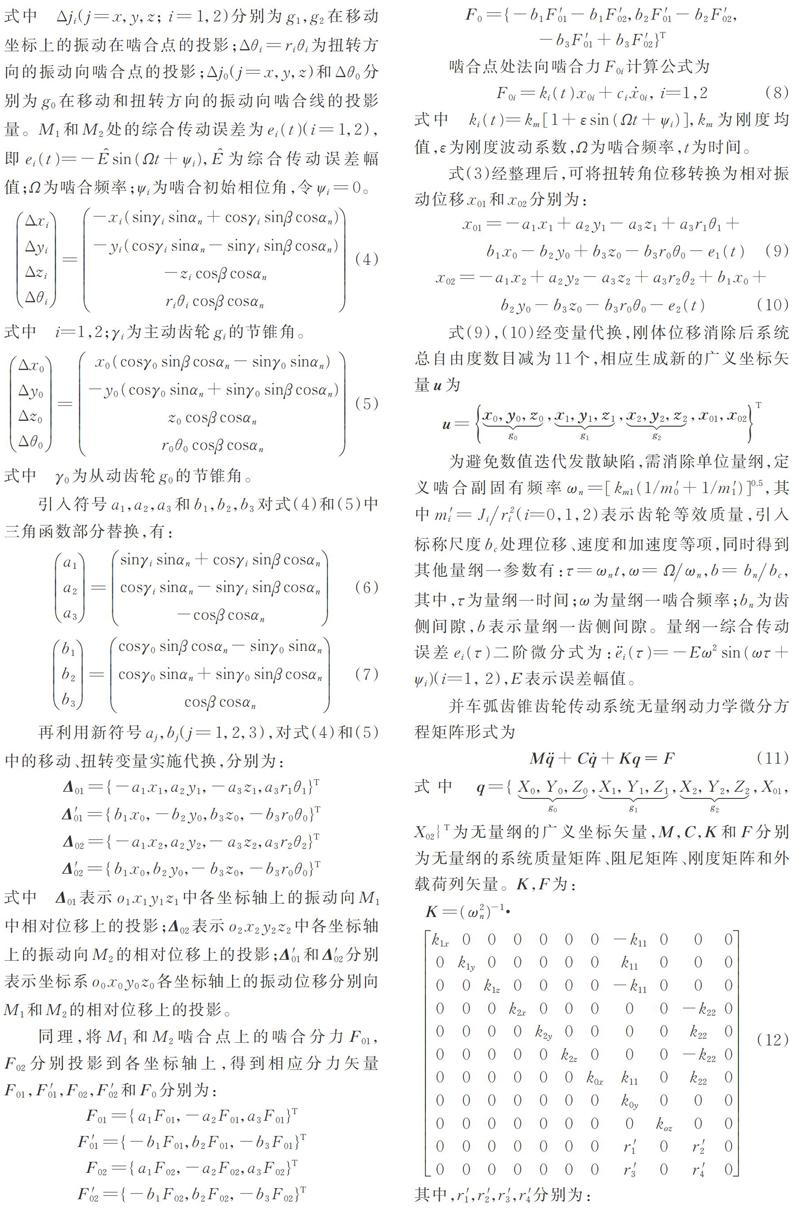
根据牛顿力学定律建立各齿轮单元振动微分方程,主动弧齿锥齿轮和的振动方程为
式中 表示中各坐标轴上的振动向中相对位移上的投影;表示中各坐标轴上的振动向的相对位移上的投影;和分别表示坐标系各坐标轴上的振动位移分别向和的相对位移上的投影。
式(9),(10)经变量代换,刚体位移消除后系统总自由度数目减为11个,相应生成新的广义坐标矢量为
并车弧齿锥齿轮传动系统无量纲动力学微分方程矩阵形式为
最后,采用变步长Runge?Kutta法求解式(11)。
2 解域界求解基础
对存在多个控制参数的非自治微分方程系统,其模型可描述为
当控制参数变化时,系统响应随之改变,为分析激励与响应间的关联机制,将一维分岔思想扩展为空间平面上的离散。二维域则由两个参数在x和方向构造的平面域,参数胞为(; )。其中和分别代表起点与终点,和分别为离散胞在x,方向的尺度。鉴于矩形胞单元尺寸均匀性好,将参数域划分为个矩形规则胞元,胞与胞间彼此毗邻。同一域内划分的胞数目越多则胞的尺寸越小、精度越高,当某一维度上的胞数目为个时,那么在该维度上的胞尺度为
某一维度上胞序列为,将各胞下相轨迹在Poincaré截面上映射截断,由吸引子状态判定参数胞解域界归属,判定准则为
式中 表示映射法则,为周期值,若时映射关系仍不满足,则表明胞为混沌参数胞。
式(18)中,如果小于给定的正数(1.010-2),那么可认为点集和归属相同状态吸引子,落在相同解域内。
3 分岔通道与解域界
3.1 分岔通道
图2为一维参数和E下位移的分岔行为与分岔点位置变化。由图2(a)可知,E=28时,出现了分别位于0.917,0.935和0.951处的三个分岔点。在[0.9, 0.954]范围内系统完全处于周期态运行,同时此段过程在2周期分支上发生跳跃式断裂,破裂造成原分支后半部无征兆性收缩,在进入P1(1周期)前一直维持两条分支,因位移随之突变,表明在0.935点诱发激变导致啮合副产生碰撞不稳定。此后当1周期发展到时系统步入一段持续混沌期。由图2(b),(c),(d)可见,随着E的增大,在[0.935, 0.951]期间,P2因受抑制而衰弱,同时在时振动越来越无规则,E为29时2周期退化愈加明显,直至E=30时右侧P2分支已完全消失,取而代之的是振动短暂恢复单周期。整体上分岔点在轴上随P2上下分支收缩而移动,在综合误差和啮合频率共同作用下系统混沌属性持续增强,二者共同作用时在一定范围可抑制多周期振动,但达到某一临界值后又将加剧系统混沌响应。
3.2 综合传动误差-刚度波动系数解域界
图3中取有限域,各维度上胞数目细分为401,解域界内规则矩形胞总数为4012,可知胞在误差和间隙域上尺度分别为2.24×10-4和4.0×10-3。参数平面域内含3个动力学解子域,即P1解域,P4解域和混沌(Chaotic)解域。整体上P1域内嵌于混沌域中形成数个周期窗口,边界清晰,E变化时系统状态转换频繁。部分主要为P4解域,从维度上对比E和知在该解域界内误差参数的改变引起系统状态的变化更显著。同时,图4揭示了各解域边界形态,边界胞代表状态响应切换点处激励参数的临界值,即分岔节点,具有实际参考意义,因为相邻解域状态在此处迁移或突变,在全局域上勾画出分岔集演化规律。
3.3 啮合频率-综合传动误差解域界
图5揭示存在复杂区解域交错现象,参数域内同时存在P1,P2,P3和混沌胞元类型,主要是分散P3胞诱发不稳定吸引子在混沌域边界附近造成该区域动态性质复杂,暗示齿轮振动此时对误差和啮合频率组合的解域较敏感,激励间相互耦合影响,参数设计时应主动避开该不规则域。P1,P2胞占据整个平面中大部分区域,混沌域形成二者隔离区。P1胞域左右两侧均存在,在E从2.5减小为1.2过程中,P1过渡到P2期间出现周期加倍行为。随着误差的持续减小,P2过渡中出现P3胞和混沌胞杂乱交错带,聚集在[0.76, 0.8]附近,可视该局部为不稳定区,进入P1域干涉现象减弱,敏感参数区通常预示着动态特性的振荡。部分边界胞还揭示了系统可从P1态直接跨入混沌未经历周期倍化。图6中由图5结果分别取为三组不同参数历经了误差变化下的最大Lyapunov指数,三组演化趋势验证了解域界参数胞区的有效性。
3.4 阻尼比-综合传动误差解域界
图7对指导或寻找最佳分岔路径意义显著,随着减小,混沌解域占据主导因素,倍周期分岔依次经历P2,P4,P8和P16等窗口。特别指出仅少量P16胞散落于混沌前边界处(如图8所示),对高周期胞数量与位置分析可知,倍周期分岔时高周期窗口呈快速收缩态势,且对激扰参数极其敏感,精密揭示需对目标区做更细密地离散,那么计算资源消耗将剧增。值越小系统不稳定振动风险越大,同时,目标域内参数胞集聚分布特性构成映射子域更有助于指导系统状态的优化与控制。图9从中取3个独立胞元(0.1, 0.35),(0.3, 0.35)和(0.4, 0.35),由Runge?Kutta法求解进一步验证了Poincaré截面信息分别为Chaotic,P4和P2状态。
为揭示多源激励下对系统性态影响的分布和关联倾向,构建了图10所示误差和间隙分别与阻尼比的P4解域界,整体各维度胞数目均为401,以整个区域内特定胞数量占比衡量对响应状态的敏感度S,即S=ni/N,ni表示状态为i的胞数量,N为总的胞数目。其中[0.05, 0.45],中P4占比16.67%,下P4占比20.21%,故此时系统对域内P4状态敏感倾向强于域。该思路为多源激励不同参数下的全局动态设计和优化提供了借鉴。
4 结 论
将胞映射与区域分解思想引入齿轮系统多源激励全局研究中,通过胞域离散赋值求解了目标参数区解域界结构,相较单维分岔而言,从更广泛角度对引起并车弧齿锥齿轮响应性态的激振因素进行了解析。
(1)构建了二维参数胞区域离散与解域界求解判定准则,在啮合频率分岔路径上综合传动误差可迫使分岔通道中部分周期分支断裂、收缩及轨道迁移。
(2)在综合传动误差分别与啮合频率和刚度波动系数的解域界中,得到分岔集、混沌带、边界胞和敏感激变参数区,应用最大Lyapunov指数追踪验证了解域界中分岔区间的演化路径。
(3)阻尼比下解域界中存在倍周期分岔集区,随着阻尼比减小,高周期窗口快速收窄,P8和P16域界异常狭窄或离散分布且参数敏感性增强,Poincaré映射点集证实了参数胞值的准确性,最后从参数胞域性态全局占比角度为多源激励动态设计与优化提供了思路。
参考文獻:
[1] 向 玲, 高 楠, 唐 亮, 等. 支承刚度变化下风电齿轮传动系统的非线性动力学特性[J]. 振动与冲击, 2019, 38(1): 111-117.
Xiang Ling, Gao Nan, Tang Liang, et al. Nonlinear dynamic characteristics of wind turbine gear transmission system with varying support stiffness [J]. Journal of Vibration and Shock, 2019, 38(1): 111-117.
[2] 魏 静, 王刚强, 秦大同, 等. 考虑修形的斜齿轮系统非线性激励与动力学特性研究[J]. 振动工程学报, 2018, 31(4):561-572.
Wei Jing, Wang Gangqiang, Qin Datong, et al. Nonlinear excitation and dynamic characteristics of helical gear system with considering modification [J]. Journal of Vibration Engineering, 2018, 31(4):561-572.
[3] Kahraman A, Singh R. Non-linear dynamics of a spur gear pair[J]. Journal of Sound & Vibration, 1990, 142(1):49-75.
[4] Roozegar M, Angeles J. A two-phase control algorithm for gear-shifting in a novel multi-speed transmission for electric vehicles[J]. Mechanical Systems & Signal Processing, 2018, 104:145-154.
[5] 徐 伟, 岳晓乐, 韩 群. 胞映射方法及其在非线性随机动力学中的应用[J]. 动力学与控制学报, 2017,15(3):200-208.
Xu Wei, Yue Xiaole, Han Qun. Cell mapping method and its applications in nonlinear stochastic dynamical systems[J]. Journal of Dynamics and Control, 2017, 15(3): 200-208.
[6] 李自刚, 李明, 江俊. 交角不对中转子-轴承系统非线性动力学行为研究[J]. 振动工程学报, 2019, 32(3):509-515.
Li Zigang, Li Ming, Jiang Jun. Nonlinear dynamics of rotor-bearing systems with a fault of angular misalignment[J].Journal of Vibration Engineering, 2019, 32(3):509-515.
[7] Hsu C S. Global analysis of dynamical systems using posets and digraphs[J]. International Journal of Bifurcation and Chaos, 1995, 5(4):1085-1118.
[8] 刘晓君, 洪 灵, 江 俊. 非自治分数阶Duffing系统的激变现象[J]. 物理学报, 2016, (18): 231-238.
Liu Xiaojun, Hong Ling, Jiang Jun. Crises in a non-autonomous fractional-order Duffing system[J]. Acta Physica Sinica, 2016, (18): 231-238.
[9] Farshidianfar A, Saghafi A. Global bifurcation and chaos analysis in nonlinear vibration of spur gear systems[J]. Nonlinear Dynamics, 2014, 75(4): 783-806.
[10] Saghafi A, Farshidianfar A. An analytical study of controlling chaotic dynamics in a spur gear system[J]. Mechanism & Machine Theory, 2016, 96:179-191.
[11] Gou Xiangfeng, Zhu Lingyun, Chen Dailin. Bifurcation and chaos analysis of spur gear pair in two-parameter plane[J]. Nonlinear Dynamics, 2015, 79(3):2225-2235.
[12] Gritli H, Belghith S, Khraief N. Cyclic-fold bifurcation and boundary crisis in dynamic walking of biped robots[J]. International Journal of Bifurcation & Chaos, 2012, 22(10): 1?17.
[13] Liu Xiaoming, Jiang Jun, Hong Ling, et al. Studying the global bifurcation involving Wada boundary metamorphosis by a method of generalized cell mapping with sampling-adaptive interpolation[J]. International Journal of Bifurcation and Chaos, 2018, 28(2): 1?19.
[14] Liu Xiaoming, Jiang Jun, Hong Ling, et al. Wada boundary bifurcations induced by boundary saddle-saddle collision[J]. Physics Letters A, 2018, 383(2-3):170-175.
[15] Liu Haixia, Wang Sanmin, Guo Jiashun, et al. Solution domain boundary analysis method and its application in parameter spaces of nonlinear gear system[J]. Chinese Journal of Mechanical Engineering, 2011, 24(3): 507-513.
作者简介: 林 何(1985-),男,副教授。电话:15891736934;E-mail: linhe@xpu.edu.cn
通讯作者: 胥光申(1964-),男,教授。电话:(029)62779109;E-mail: xugs988@126.com
