气动机械手稳定运动的控制策略综述
2021-12-16陶鑫瑞高春艳
陶鑫瑞,高春艳,陈 璇,潘 政
(1.河北工业大学 机械工程学院,天津 300401;2.河北工业大学 电气工程学院,天津 300132)
引言
近年,气动技术的应用领域迅速拓宽,尤其是在食品加工及包装[1]、自动上下料[2-3]、自动化冲压生产线[4]、高频淬火[5]等自动化生产线上,主要依靠PLC控制技术与气动技术的结合来提高系统的自动化程度,使控制方式更加灵活[6-8]。气动机械手以及柔性自动化生产线的作业对象环境正朝着非结构化方向拓展[9],具有越来越强的不确定性,对气动机械手的运动稳定性提出了更高的要求。稳定性控制关系到生产节奏、安全、维护和成本等一系列问题,如气动焊接机械手的不稳定会严重影响焊接质量[10],在电器装配生产线上气动机械手的不稳定可能导致产品不能正常使用。因而,研究气动机械手的稳定运动控制方法是推动其应用发展的关键环节。
1 气动机械手运动控制的难点
如图1所示,机械手已经逐渐进入社会生活的诸多领域,从汽车制造业[11]、金属加工业[12],到家政服务、农业工业化、助老助残等方向[13],都有较为成熟的应用,表现出良好的性能,尤其近年来在人机协作以及仿生机器人方向,气动机械手有着较大的优势,如强度高,可获得更高的功率-重量比,高安全性等,因而得到更多关注。

图1 新热点下的各种机械手
但是,由于气压传动技术本身固有的高度非线性特征和空气可压缩性都对实现高性能的跟踪控制带来了许多困难[14],时间变化、顺应性、高滞后性、缺乏阻尼能力等问题,导致难以对其行为准确建模以及设计具有高性能定位的控制器[15-16],使得气动系统的控制精度、响应速度和稳定性难以达到理想效果。非线性的问题使气动机械手的运动存在许多不确定性,从而难以获得精确的数学模型,导致运动稳定性和精度较差[17]。基于这些问题背景,国内外越来越多的科研院所和研究人员投入到解决气动机械手的稳定运动问题的方法研究中去。
2 基于模糊控制的控制策略
针对气动机械手难以建立准确的数学模型的问题,不少研究学者提出基于模糊控制的控制策略。模糊控制是基于控制经验或相关专家的知识储备,因此在设计中不必建立精确的被控对象数学模型[18-20],适用于解决气动机械手的非线性控制,模糊控制的基本原理如图2所示。
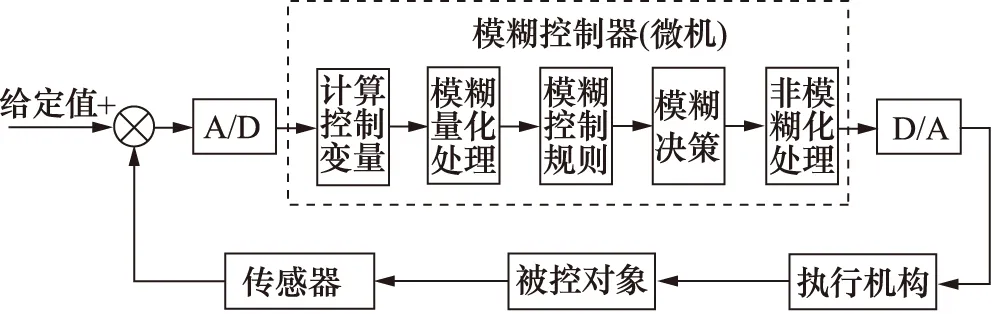
图2 模糊控制原理框图
2.1 模糊自整定PID控制
常规PID控制算法如图3所示,存在参数不能在线调整、恢复稳定状态慢、积分饱和现象等缺点,针对这些缺陷,研究者将模糊控制与常规PID控制结合,实现对参数KP,KI,KD的在线调整。

图3 传统PID控制原理图
潘广香等[21]针对透明纸快换系统气动机械手存在的控制精度不高和稳定性差的问题,设计出如图4所示的模糊自整定PID控制器。当系统状态或参数发生变化时,计算机会实时检测和计算系统误差e和误差变化率de/dt,应用模糊合成推理设计PID参数的模糊矩阵表,查出修正参数代入下式计算:

图4 模糊PID控制结构
(1)

在线运行过程中,控制系统通过对模糊逻辑规则的结果处理、查表和运算,完成对PID 参数的在线自校正。
王伟伟等[22]建立了基于比例阀控缸的气动伺服系统并以气缸的柔性定位为研究对象,分别用经典PID控制和模糊自整定PID控制设定控制器,实验结果表明,模糊自整定PID控制的误差是经典PID控制的1/4,且具有更好的响应速度和鲁棒性。因而,对于作业有一定运动精度要求的气动机械手,优先选用模糊自整定PID控制。鞠鹏程等[23]利用模糊PID控制策略对气动机械手位置伺服控制器进行设计并实现在线参数自整定,能有效地实现气动机械手的定点控制。DU M等[24]研发的应用于图书馆自动取、放机器人,也是采用模糊自整定PID控制,并在新加坡国立大学的图书馆使用,效果良好,为实现无人图书馆奠定了基础。
还有一些学者根据实际需求,对模糊自整定PID控制进一步优化。例如,程其鹏等[25]在上述控制策略的基础上结合了免疫PID控制的优点,用模糊控制在线调节参数KI和KD,模糊免疫控制算法在线调节参数KP,结构如图5所示。实验验证,系统在超调量、响应速度及鲁棒性等方面都得到了明显改善,并实现了气动机械手的柔性定位。
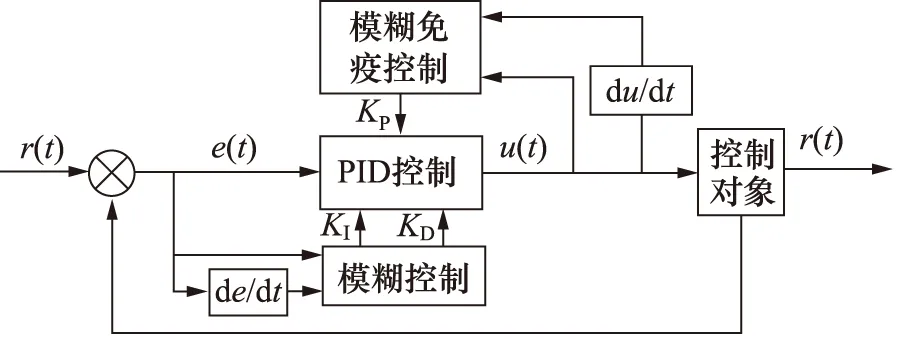
图5 模糊自整定免疫PID控制
2.2 自适应模糊控制
自适应模糊控制策略即借鉴自适应控制理论的一些思想和观点来设计模糊控制器。通过在线或者离线调节模糊控制规则的结构或参数,使其尽可能处于最优状态。
以Lyapunov稳定律为例,一般先定义Lyapunov函数:
(2)
再结合滑模函数以及控制律得到:
(3)

引入自适应律:
得:
(4)
为了保证系统稳定,以及最大化消除逼近误差,在控制律中引入鲁棒项。
根据上述理论,WANG T等[26]提出的针对非线性拟人手臂系统的自适应模糊控制方法更能保证运动过程中的稳定性和适应性,并将提出的控制方案应用于具有高度非线性和模型不确定性的上肢康复气动机械手[27-28]和MIMO系统中[29-30],实验效果良好。ZHANG X等[31]提出了一种将内模控制与模糊控制相结合的模糊自适应内模控制算法(FAIMC),通过T-S模糊模型辨识获得过程的模糊模型和逆模型,并通过模糊逻辑在线调整滤波器参数。这两种方法的仿真和实验结果表明,基于模糊控制的改进算法能较为有效地提升气动机械手的稳定性,具有良好的鲁棒性和有效性。
吴晓航[32]针对系统的非线性不确定项,提出基于模糊补偿的自适应控制方法,且实验证明能有效消除其带来的影响,提高机械手的控制精度。模糊系统设计为:
(5)
针对外加干扰,设计模糊系统为:

(6)
2.3 神经模糊控制
神经模糊控制是神经网络技术与模糊控制结合的产物。模糊控制在实现自动生成与调整隶属函数和模糊规则上存在困难,而人工神经网络利用大量神经元构成网络,使控制具有自适应的学习能力、容错性和鲁棒性,结合神经网络的学习能力来训练模糊规则,能有效提高气动系统的学习能力和表达能力。
陈小俭[33]分别设计了自整定PID控制器和基于人工神经网络的模糊控制器,并做了大量实验进行效果比对,结果表明神经模糊控制不仅具有较强的鲁棒性和快速响应性,更有较高的定位精度,能满足工业气动机械手的定位要求。
KYOUNG K A等[34]设计用于肘关节康复训练的两轴气动机械手,在控制上使用2个模糊神经网络,采用FuzzyNN1对系统进行权值训练,而FuzzyNN2则是利用由FuzzyNN1导出的训练权值结构来产生合适的控制信号,其实验结果证明跟踪误差接近于0,且在不同输入信号下都具有良好的效果。所提出的控制算法如式(7)所示:
τ=τPID+τFNN2
(7)
CHIANG C J等[35]专门研究了气动肌肉驱动器的神经网络模糊滑模控制,控制过程中自适应学习能力由神经网络提供,其中基于梯度下降法和反向传播算法调整对模糊滑模控制器(FSMC)和积分器的控制增益,以最大程度地减小跟踪误差。
2.4 对模糊控制的评价
上述阐述是较为典型的气动机械手模糊控制相关的策略,从常规的PID控制算法出发,结合模糊控制理论改进为可在线调整KP,KI,KD的模糊自整定PID控制,再到可以在线或离线调整模糊规则的自适应模糊控制,在控制的过程中,为了自动生成与调整隶属函数和模糊规则,结合人工神经网络提出神经模糊控制。
模糊控制方法不需要气动机械手运动过程的精确数学模型[36],且鲁棒性强,适用于解决气动系统中非线性[37]、强耦合时变[38]、高滞后[39]等问题。以实际经验为基础,利用模糊规则对未知模型的结构系统进行控制,算法简单,实时性强,但动态品质略差[40]。在实际中,往往是在模糊控制的基础上结合其他自动控制理论,使控制对象具有自适应性,使系统在超调量、响应速度及鲁棒性等方面都得到改善。
3 基于神经网络的控制策略
基于神经网络的智能控制是指在控制系统中利用神经网络对难以精确描述的复杂非线性对象进行建模,或作为控制器,或进行计算和推理[40],基本神经元模型如图6所示。在气动机械手的控制中,神经网络模型控制器包括控制器(NNC)、神经网络模型(NNM)和气动伺服系统,NNC用来计算系统的控制信号和调整网络权值,NNM用来计算误差。

图6 基本神经元模型
3.1 前馈神经网络控制
基于神经网络的气动机械手运动控制策略中,现行最多的是前馈神经网络控制。刘兴华等[41]针对平面运动的多段可伸长气动软体手臂运动控制,提出一种基于前馈神经网络的分层控制方法。第一层依据代价函数利用梯度下降法确定最优姿态,第二层利用神经网络来确定每段姿态所对应的气压,并考虑了黏弹性的影响。神经网络自学习示意图如图7所示,用于求解配置空间和致动空间之间的关系,输入端分别为曲率k和弧长l,输出为每侧气压pl,pr。Net*为改进后的神经网络,增加了一个姿态的曲率k′和弧长l′,用于减小黏弹性引起的误差。

图7 基于前馈神经网络的分层控制方法
同样地利用分层思想,ROBINSON R M等[42]在与人互动的机械人中开发了3种高级分层控制策略,如图8所示,分别为滑模控制、自适应滑模控制和前馈神经网络控制,每种都包含不同级别的先验模型知识,以实现对平滑运动的精确跟踪。

图8 分层人工神经网络控制器
向荣[43]针对气动机械手运动过程中的抖动问题,通过在Lyapunov函数引入位置参数的自适应律,实现较为精确的前馈补偿,并应用神经网络替代饱和函数实现跳变力矩来消除抖动。在变结构与前馈神经网络结合的基础上加强系统自适应能力,消除了抖振现象,并且系统的稳态误差没有太大变化。
3.2 递归神经网络
递归型神经网络,相对于前馈型神经网络的主要区别是存在一个或多个反馈环节,另外,其神经元常采用加性模型,使其本身就是非线性动力学模型。有研究指出,单层递归型神经网络的映射能力就是多层前馈型神经网络的多倍。
THURUTHEL T G[44]提供了一种基于机器学习的神经网络控制方法,用于开发软机器人机械手的动力学模型,并提供一种用于任务空间中气动机械手预测控制的轨迹优化方法,如图9所示。前向动态模型使用递归神经网络表示,闭环策略是使用轨迹优化和监督学习得出的对于更复杂的动态模型,很难开发出能够以所需的控制周期运行以进行闭环控制的MPC,在文献[44-45]中得以证明。

图9 用于气动柔性机械手的神经网络控制
邢科新[46]设计的手功能康复机器人气动肌肉驱动器,在递归高阶神经网络的基础上提出了回声神经网络控制方法,通过大量神经元组成的网络,在权值的调整下使网络具有回声状态特性。结构如图10所示,虚线表示需要训练的权值。假设输入数据、内部单元和输出数据的维数分别为K,N,L,所有神经元均通过L×(K+N+L)的输出权值矩阵Wback与输出单元连接,即输入到输出节点以及输出节点之间可能直接互连。这使得系统具有动态特性和短期记忆能力。

图10 回声神经网络结构图
王冬青等[47]针对含时滞d的气动人工肌肉(PAM)手臂用三层递归神经网络建立模型,超前d步预测PAM手臂的输出角度,每一步都用RNN模型当前时刻的输出值与PAM手臂当前时刻实际输出值之差的平方做为RNN权值的在线调整准则对RNN预测模型的权值进行在线调整,以自适应PAM手臂的不确定性和时变性,控制效果良好。
3.3 基于神经网络的其他研究
除了前馈神经网络控制和递归神经网络控制,还有一些其他基于神经网络的控制方法,整理如表1所示。

表1 基于神经网络控制的策略比对
3.4 对神经网络控制的评价
神经网络控制策略在气动柔性手爪的抓取作业中应用较多,文献[55-57]的研究结果可为气动柔性手爪的稳定抓握控制提供重要的决策依据。其他的还有例如飞机发动机清洁[58]、果蔬采摘[59-60]、包装分拣[61]等实际应用。在上述研究中,神经网络体现出很强的非线性拟合能力、记忆能力和自学习能力[62],可映射复杂的非线性关系。神经网络控制策略常常与模糊控制、动态滑模控制等结合起来,为解决复杂非线性、不确定性系统开辟了新途径。通过对气动机械手动力学方程中未知部分的在线精确逼近,从而可以通过在线建模和前馈补偿实现机械手的高精度跟踪,但神经网络系统本身就是复杂的非线性系统[63],其引入进一步增加了控制系统的复杂度,从应用的角度来说,最大的缺点是难以保证气动机械手在各种工作状态下都能具有良好的稳定性。
4 基于鲁棒控制的控制策略
鲁棒控制是一种考虑不确定性的系统分析思想[64-65],也包含了一系列控制器设计(控制参数整定)算法,大多数鲁棒控制的参数整定方法都是通过最优控制的思想去实现的,鲁棒控制与优化控制二者有重叠部分,并非仅仅是包含与被包含的关系。
周云山等[66]曾用H∞理论进行鲁棒控制器的设计,并应用在挤奶气动机械手上。为满足鲁棒瞬态响应性能,使补偿器的设计满足方程:
min‖F1(G,K)‖∞<1
(8)
式中,
(9)
其中,G是控制过程的名义传递函数,K为补偿器,γ是损失函数的系数,s=(I+GK)-1为灵敏度函数,w1和w3为权函数。
结果表明,外部存在扰动时,鲁棒控制器能维持期望的输出特性。
同样应用H∞理论,巴少男[67]以旋转开合式气动手指为研究对象,基于气动机械手抓取、装配等作业对夹持力的控制精度要求,设计出一种混合灵敏度鲁棒控制器。屠立等[68]对基于H∞控制器的气动柔性机械手进行优化,保证系统内部有稳定的闭环,最终消除扰动等影响。
除了H∞理论的鲁棒控制,也有许多研究人员采用优化控制方法来设计鲁棒控制器。例如,TPIPATHY N S等[69]提出了一种非线性不确定气动机械手的有限时间鲁棒控制方案,采用最优控制方法来设计所提出的鲁棒控制律,通过及时求解状态相关的微分Riccati方程来生成控制输入,在存在有限不确定性的情况下以分析和数字方式确保稳定性。AMATO F等[70]提出了一种不确定的双线性系统的鲁棒和最优控制策略,并将其应用于气动机械臂的跟踪控制设计中,取得良好效果。
鲁棒控制也会与其他类别的控制理论相结合,成为一种新的控制策略。例如,ZHU X等[71]结合自适应理论提出了一种适用于由气动肌肉驱动的带有冗余DOF机械手的自适应鲁棒姿态控制器,并引入了等效的类似平均刚度的期望约束,以实现精确的姿态跟踪,同时减少由测量噪声引起的控制输入颤动。CHEN Ye等[72]为单杆气动执行器合成了自适应鲁棒神经网络控制器(ARNNC),结构图如图11所示。该框架中,自适应控制通过参数估计提高了动态补偿的精度,鲁棒控制减弱了未建模动态和未知干扰的影响,神经网络控制更好地补偿自适应控制的非建模动态、随机干扰和估计误差,最终实现了高精度的轨迹追踪。
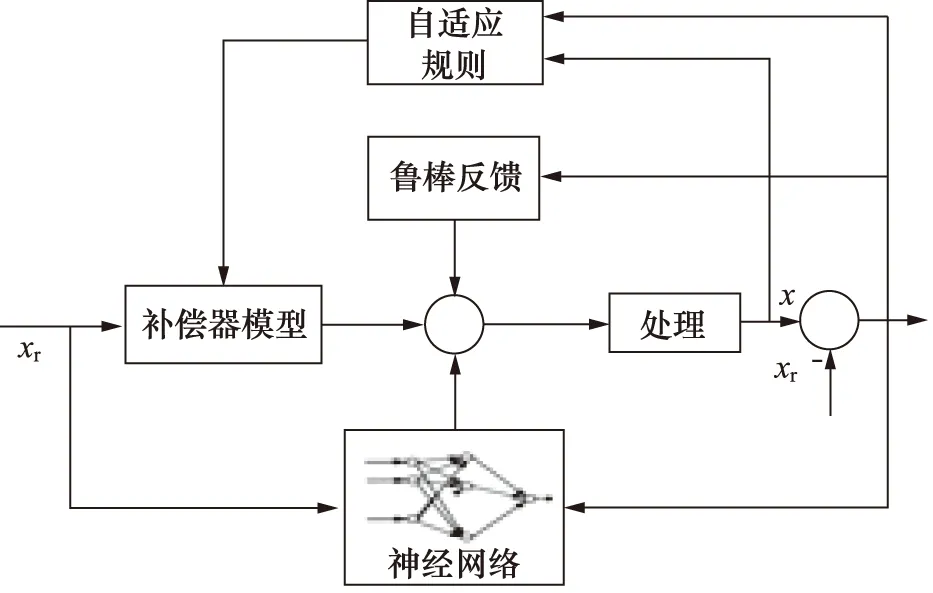
图11 自适应鲁棒神经网络控制器结构
5 结论
模糊控制、神经网络、优化控制和鲁棒控制是重要的智能控制技术,主要应用于解决不确定、非线性、复杂的自动化问题。气动机械手发展迅速,新一代气动机械手更是在建模、控制等方面有许多挑战性问题亟待解决[73-74]。在上述的研究成果中,模糊控制和神经网络控制是解决气动机械手非线性、滞后性等问题的利器,并且在仿生学[75]、医疗康复辅助、搬运与装配[76]以及农牧业等领域都有着较为成熟的应用,结合新生的智能控制理论,可衍生出精度更高、性能更好的控制策略。相对地,在气动机械手运动控制的研究上,鲁棒控制处于停滞状态,相关文献年份较旧,近些年,也有一些将鲁棒控制与其他控制理论结合的尝试,在工业应用上该控制策略使用也较少。
不难发现,研究人员为了使气动机械手能够更加稳定运动,会将多种控制方法各取所长结合起来。在未来,随着控制技术的更一步发展,气动机械手的稳定可靠运动控制将针对危险物品处置、立面操作、复杂形貌处理加工等工程场景有更切实可行的应用前景。
