大深度潜器冲吸复合清淤工具研制
2021-12-16胡晓函吴德发刘银水
郭 威,姜 磊,胡晓函,王 希,吴德发,刘银水
(1.华中科技大学 机械科学与工程学院,湖北 武汉 430074;2.中国船舶科学研究中心,江苏 无锡 214082)
引言
我国现有各类水库大坝9.8万余座,且许多大坝使用年限长[1],在发挥效益的同时存在安全隐患,例如坝面裂缝、凹坑[2-3]等。大坝检测是确保大坝安全的必要措施[4-5],但坝面附着的泥沙导致无法直观准确的观察到坝面情况,因此大坝检测时必须清除坝面泥沙并且保证坝面附近水域清澈。
国内外现有的大坝检测方法主要分两种[6]:
(1) 人工方法。雇佣潜水员携带水下摄像机等设备进行水下检查。但人工方法受潜水员潜水深度低、工作时间短、工作条件有限、潜水员危险性较大等诸多限制;
(2) 随着水下载人潜水器技术的成熟,其在科研方面发挥着重要作用[7]。水下载人潜器搭载作业工具进行水下检测[8-9],首先作业工具清除坝面附着的泥沙,然后载人舱内的工作人员直接观测或使用水下电视间接观测坝面情况,这种方法对水质要求极高。现有的水下清除作业工具有坝面机械清理机,张立山等[10]设计的淹没式水射流冲泥装置。这些装置工作时都会使坝面附近水域变浑浊,无法清晰的观测到坝面情况。
因此,设计出一个能在大深度环境下完成坝面泥沙清除,及时吸走坝面附近浑浊水,并且可以稳定工作的大深度潜器冲吸复合清淤工具是目前亟需解决的技术难题。
1 作业工具工作原理及结构
1.1 工作原理
大深度潜器冲吸复合清淤工具搭载于水下潜器,应用于坝面泥沙的清除,要求小型化、简单化、轻量化。作业工具系统原理如图1所示。

图1 作业工具系统原理图
冲吸复合作业工具由水下电机、离心泵、控制阀组、冲泥和吸泥工具等元件构成。水下电机驱动离心泵作为系统动力源,分别给冲洗工具和抽吸工具提供动力。直接冲刷容易引起附近水域浑浊[11],影响观察;而通过应用射流泵,将坝面浑浊水经过管道从潜器的艉部排出,从而保证坝面附近水域清澈,便于观察。因此本系统将冲洗和抽吸工具进行融合,建立冲洗与抽吸复合喷头,并通过二位二通换向阀分别控制作业工具冲洗、抽吸和冲吸复合工作模式的转化。
1.2 系统组成及参数
动力源:水下电机驱动离心泵工作提供高压流体,额定扬程30 m,额定流量12 m3/h。
控制阀组:将大深度潜器冲吸复合清淤工具的2个电磁截止阀A,B进行集成设计,该方案中2个单阀通径40 mm,开度3.5 mm,共用1个阀体,并通过阀体内部流道连通,共同使用1个进口,2个单阀可以互不干扰的独立工作。将动力源提供的高压流体分为两路,一路供给到复合喷头喷嘴实现作业工具的冲洗功能;一路供给到射流泵,实现作业工具的抽吸功能;控制阀同时工作,实现冲吸复合功能。
复合喷头:将冲泥工具出口喷嘴与抽吸工具进口相融合,组成复合喷头。冲泥工具喷嘴数量12个,喷嘴直径3.6 mm,长度为10 mm。
射流泵:作业工具动力源产生的高压水作为射流泵的工作液体使射流泵内部形成低压,抽吸复合喷头所在水域的浑浊水,两股流体在喉管入口段及喉管内进一步混合并进行质量和动量传递,最后从扩散管排出,完成射流泵工作的全过程。依据作业工具动力源的额定流量与扬程以及射流泵理论[12],射流泵的面积比设计为4,喷嘴直径10 mm,喉管长度为130 mm。
为克服水深压力对工具性能的影响,电机、电磁铁、泵驱动腔等壳体采用压力补偿器进行补偿,可适应大深度环境压力。
1.3 装置特点
(1) 结构简单、轻便。作业工具搭载于载人潜器,该装置冲洗与抽吸共同使用1个动力源,将冲洗喷嘴与抽吸喷头融合为复合喷头;
(2) 易于操作。作业工具工作时通过控制阀组进行工作模式的切换;
(3) 维护方便。作业工具的各个零部件模块化,结构简单,维护方便;
(4) 多模式切换。冲洗工作模式,抽吸工作模式,冲洗与抽吸复合工作模式。
2 作业工具冲洗与抽吸特性仿真分析
2.1 靶距对流场特性影响分析
在复合喷头其余参数不变的前提下,单纯改变射流靶距,在SolidWorks中分别建立射流靶距为60,80,100,120 mm的物理模型,应用ANSYS中的DM模块抽取流体域,采用 Fluent前处理软件MESH进行网格划分,划分时采用适应性较强的四面体非结构网格。仿真分析中所采用的参数设置及边界条件如下:
(1) 流体模型——RNGk-ε湍流模型;
(2) 边界条件——复合喷头进口采用压力进口边界条件,进口压力设置为0.3 MPa;抽吸出口和流体域出口采用压力出口边界条件,出口压力设置为0 MPa;
(3) 求解设置——采用SIMPLE算法,离散控制方程组的源项和扩散采用二阶中心差分格式项,离散控制方程组的对流项采用二阶迎风格式,计算收敛精度为10-4。
通过仿真分析,射流靶距为60,80,100,120 mm的复合喷头出口对应出口射流的最大速度(23.06±0.38) m/s,说明流体经过喷嘴获得的速度大小与外流场的长度无关。
不同靶距x外流场最大速度v如图2所示,复合喷头在4种靶距下,各截面的速度变化趋势基本相同;在外流场中,喷嘴射出的流体与外流体域发生质量和动量的交换,速度逐渐变小,在距喷嘴较近处速度衰减剧烈,距喷嘴较远处速度衰减逐渐减弱。在射流到达壁面之前,最大速度的变化曲线相差较小,当流体冲击到壁面时,速度急剧降低至0 m·s-1。
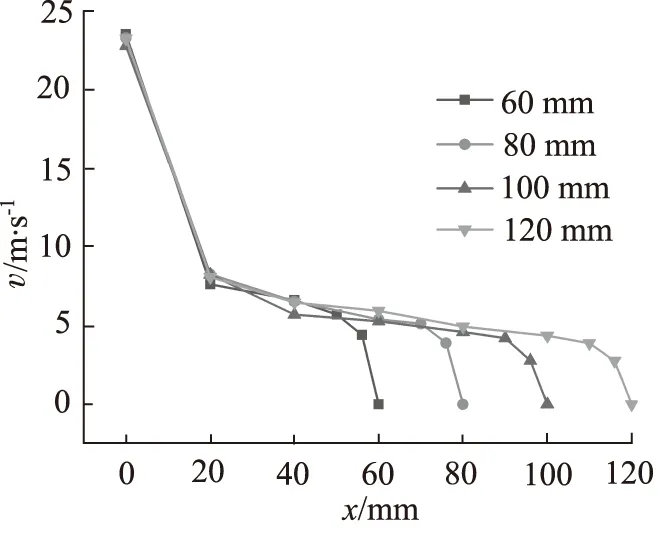
图2 不同靶距外流场最大速度曲线
2.2 冲洗工作模式
作业工具冲洗工作模式时,控制阀组A阀口关闭,B阀口开启,水下电机驱动离心泵产生的高压流体经过控制阀组阀口B到达复合喷头喷嘴,并从喷嘴射出冲击到壁面。
应用ANSYS仿真软件中的DM模块抽取流体域如图3所示,应用MESH模块对流体域进行网格划分,选取网格数量为7911040个和9817022个,应用Fluent模块进行内部流场仿真计算。2种网格的模拟结果相差很小,所以从计算误差和计算效率两方面考虑,最终选定数量为7911040个的网格进行模拟计算。

图3 流体域
仿真分析中所采用的参数设置及边界条件如下:
(1) 流体模型——RNGk-ε湍流模型;
(2) 边界条件——阀组流道入口采用压力进口边界条件,因动力源离心泵的扬程为30 m,因此进口压力设置为0.3 MPa;射流泵出口和流体域出口采用压力出口边界条件,出口压力设置为0 MPa(表压);
(3) 求解设置——采用 SIMPLE 算法,计算收敛精度为10-4。
作业工具冲洗工作模式的仿真流体域的压力分布云图如图4所示。观察压力云图可以发现,冲洗工作模式,流体经过控制阀组B阀口到复合喷头安装环,并从喷嘴射出到外界流体域这一过程中压力逐渐降低,流体域从阀组进口到复合喷头安装环前这一段压力范围在0.2645~0.3000 MPa,阀组管路与喷嘴安装环进口连接处压力范围为0.1935~0.2290 MPa,喷嘴安装环整体压力范围为0.2290~0.2645 MPa,外部流体域的压力范围为0~0.01616 MPa。阀口位置处压降较低,压损较小;喷嘴安装环经喷嘴射流到外界流体域这一过程压降最大,即喷嘴处压损较大。

图4 压力分布云图
作业工具冲洗工作模式的迹线分布如图5所示,流体从阀组进口进入依次经过控制阀组、复合喷头喷嘴安装环,从复合喷头喷嘴高速射出冲击到壁面改变流体运动方向,一部分从复合喷头抽吸进口进入,经射流泵排出;一部分从外界流体域出口流出。喷嘴安装环内部速度变化明显,安装环进口处速度较高,随距离安装环进口距离的增加,安装环内速度逐渐降低,且两侧速度对称分布。这是因为进入安装环进口的流量从安装环上均匀分布的喷嘴射出,随距离喷嘴安装环进口距离的增加,管路中的流量逐渐变小,所以速度降低。
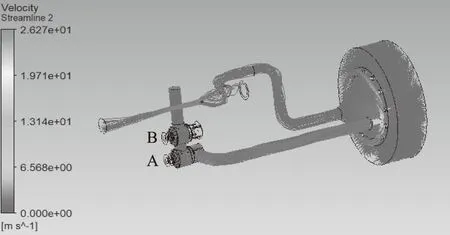
图5 迹线分布图
仿真结果显示,喷嘴出口流量为7.2 m3/h,抽吸流量为1.558 m3/h。
2.3 抽吸工作模式
作业工具抽吸工作模式时,控制阀组A阀口开启,B阀口关闭,动力源提供的高压流体作为射流泵工作流体经过控制阀组A阀口进入射流泵内部,使射流泵工作,抽吸复合喷头附近水域流体。
作业工具抽吸工作模式流体域的压力分布云图如图6所示。观察压力云图可以发现冲洗工作模式,流体经过控制阀组A阀口作为射流泵的工作液体,从射流泵工作液体进口进入,经过吸入室、喉管和扩散管从射流泵出口流出到外界流体域,这一过程中压力先降低再升高。流体域从阀组进口到射流泵工作液体进口前这一段压力范围为0.26810~0.30000 MPa,喉管处压力范围为-0.11650~0.08447 MPa,其余外部流体域的范围为0.05242~0.01616 MPa。

图6 压力分布云图
作业工具冲洗工作模式的迹线分布如图7所示,流体在射流泵喷嘴处速度最大为26.90 m/s,外界流体通过复合喷头抽吸进口进入管路,作为射流泵的被吸流体进入射流泵内部,速度逐渐增加,但小于工作流体的速度。工作流体与被吸流体在喉管内部进行质量和动量的交换,使混合流体在喉管末端速度变均匀,并从扩散管排出。

图7 迹线分布图
结合作业工具的抽吸工作模式流体域的压力分布云图和迹线分布图,可以得到:作业工具抽吸工作模式时,动力源离心泵提供的高压流体,作为射流泵的工作流体,经过控制阀组在射流泵喷嘴处形成高速流体射至吸入室,使该区域形成低压,与外界环境压力形成压力差,在压力差的作用下将被吸流体卷吸入吸入室,2股流体在喉管入口段及喉管内充分的混合并进行质量和动量传递,在喉管末端速度趋于一致,进入扩散管后,扩散管过流面积逐渐增大,将流体动能转换为压力能,从射流泵出口排出。
仿真结果显示,喷嘴出口流量为0 m3/h,抽吸流量为8.67 m3/h。
2.4 冲洗与抽吸复合工作模式
作业工具冲洗与抽吸复合工作模式,控制阀组同时开启,水下电机驱动离心泵产生的高压流体一部分经过控制阀组A阀口到达射流泵工作液体进口,使射流泵工作,抽吸复合喷头附近水域流体;一部分经过控制阀组B阀口到达复合喷头喷嘴,并从喷嘴射出冲击到壁面。
作业工具冲洗与抽吸复合工作模式是冲洗模式与抽吸模式两者的结合。流体域的压力分布云图如图8所示,从图中可以看到冲洗与抽吸复合工作模式时,压力云图变化与单作用冲洗模式和抽吸模式相比,整体趋势相同,但管路内的压力相对减小。流体域从阀组进口到射流泵工作液体进口前这一段压力与流体域从阀组进口到复合喷头安装环这一段压力范围为0.237~0.300 MPa;喉管处压力范围为-0.111~0.015 MPa,喷嘴安装环整体压力范围为0.174~0.205 MPa。

图8 压力分布云图
作业工具复合工作模式的迹线分布如图9所示,冲洗模式与抽吸模式两者的结合,但冲击速度与单作用冲洗模式相比略有减小。

图9 迹线分布图
仿真结果显示,喷嘴出口流量为6.1 m3/h,抽吸流量为10.08 m3/h。
3 作业工具试验
大深度潜器冲吸复合清淤工具实物如图10所示。本试验主要根据样机的实际应用环境,通过高压模拟试验台对样机进行耐压试验,如图11所示,试验台加卸压p流程如图12所示。为验证大深度潜器冲吸复合清淤工具仿真分析的有效性,进行陆地环境样机冲洗模式、抽吸模式、冲吸复合模式的流量测试试验,水池试验如图13所示,试验的数据与仿真数据如表1所示。
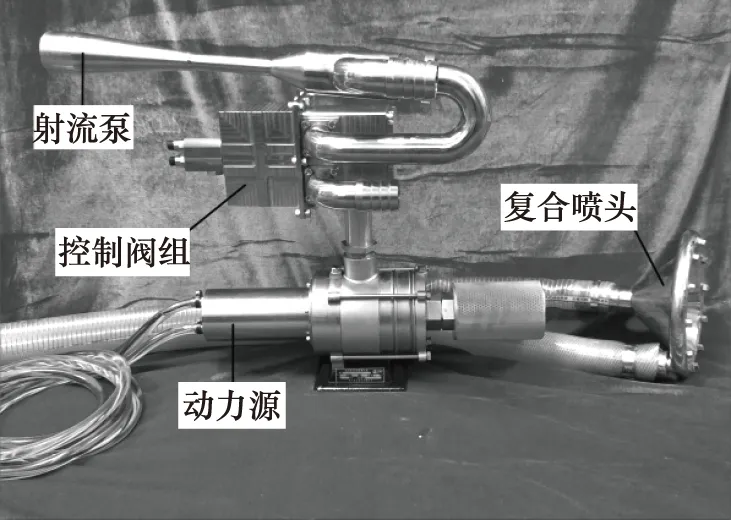
图10 工具实物图

表1 试验与仿真数据

图11 高压环境模拟试验

图12 加卸压流程图

图13 水池试验
通过耐压试验验证了大深度潜器冲吸复合清淤工具在不同的环境压力下具有很好的绝缘、密封与耐压性能,并且可以稳定工作。
对大深度潜器冲吸复合清淤工具不同的工作模式进行模拟仿真分析,其作业工具进口流量与试验结果相比,误差小于11%,两者的一致性较好。
4 结论
为清晰观察水下大坝,设计出冲洗与抽吸功能复合的水压作业深水工具。通过CFD数字仿真分析,得出不同工况下的压力和流量特性,抽吸流量大于冲洗流量,从而保证冲洗引起的浑水可充分吸走。最后通过水池和压力筒试验,验证了设计的合理性,目前已装备于我国首艘大坝检测载人潜水器。
